digital twin opcua
1.0.0
該存儲庫包含用於使用Visual組件4.0(VC 4.0)和OPC UA的機器人單元格開發的文件。
碩士論文: http://hdl.handle.net/11250/2561319
等級:
該系統當前包含以下功能:
它是通過攝像機跟踪進行的固定外殼,以說明DTW的某些功能:
https://youtu.be/xlqhqpmjwla
有關改進的更多信息,請參見項目報告第5.1.2節:
http://hdl.handle.net/11250/2561319
該項目由生產技術系挪威科學技術大學(NTNU)發起。該項目的目的是:
為了快速響應意外事件和新的需求而沒有廣泛的系統變化,未來的生產系統必須能夠更獨立地工作。需要智能機器執行複雜的任務,而無需詳細的編程且沒有人類互動。自主系統知道自己的能力(以“技能”為模型)及其狀態。他們能夠在一組可能的動作,編排和執行技能之間進行選擇。為了取得成功,自主系統需要對生產過程的當前狀態以及與外部環境的互動中的自身行為進行現實模型 - 通常稱為數字雙胞胎。
OPC Unified Architecture(OPC UA)是由OPC基金會開發的工業自動化機器對機器通信的獨立於平台的協議。 OPC專注於同時訪問大量實時數據,因為系統性能受到最低影響。 OPC UA有可能成為未來工業環境中的重要基礎,在該工業環境中,機器提供了“作為服務的生產”,並且生產中的所有機器和傳感器都是在線的(物聯網)。
在此任務中,將研究數字雙胞胎的實現。必須開發一個解決方案,該解決方案可以在機器人,PLS和其他相關控制系統之間提供無縫的通信,這些控制系統可以成為工業生產系統的一部分,該系統與系統的一個數字表示相關。該系統必須在研究所機器人實驗室進行測試。
a)描述如何使用OPC UA實現數字雙胞胎。
b)檢查使用視覺組件4.0或類似仿真軟件的優點和缺點
對於數字雙胞胎。
c)使用視覺組件4.0或類似的仿真軟件來建模和模擬研究所的機器人單元。
d)檢查使用kukavarproxy和kuka rsi以太網的優點和缺點
在Kuka KR C4機器人控制器和數字雙胞胎之間。
e)通過使用OPC UA進行通信,為研究所機器人實驗室的數字雙胞胎提供了解決方案。
f)在固定情況下嘗試系統。評估結果。
該項目探討了“行業4.0(I 4.0)”一詞,並在這場現代工業革命中使用數字雙胞胎(DTW)作為資產。 DTW可以描述為物理系統的數字複製品,包括有關該系統與環境相互作用的數據。該項目的目的是為NTNU的MTP Valgrinda開發一個機器人單元的DTW,並研究通過在該系統中引入技術以及一般自動化機器人系統的域而獲得什麼好處。
DTW是使用OPC UA通信體系結構開發的。 OPC UA被稱為I 4.0的先驅,因為它是旨在行業溝通標準化的通信體系結構。比較了三種不同的可視化軟件解決方案。得出的結論是,視覺組件4.0(VC 4.0)是開發機器人細胞視覺表示的最強候選者。創建了使用VC 4.0和OPC UA A DTW的DTW。
該項目中完成的大多數工作都是圍繞創建能夠通過使用OPC UA將物理機器人單元連接到VC 4.0中虛擬表示的通信模塊的。這項工作的結果是一個通信庫,其中包含機器人單元的虛擬表示以及能夠提供DTW各種功能的不同通信模塊。該庫是開源的,可以在項目的GitHub存儲庫中找到
https://github.com/akselov/digital-twin-opcua
此庫中包含的軟件使DTW能夠對物理機器人的運動進行實時鏡像,繪製機器人傳感器數據並從DTW中控制機器人。開發了圖形用戶界面來組織功能。圖2說明了DTW的當前通信體系結構。
在固定情況下對DTW進行了測試。這是一個多機器人案例,包括移動的鏡像,繪製傳感器數據和VC 4.0的控制。它是由案件的視頻製作的,該視頻已在線發布
https://youtu.be/xlqhqpmjwla
得出的結論是,OPC UA是在此DTW中使用的一個很好的解決方案,因為可以在任何平台上實現,並且比基於客戶端/服務器的系統中使用的傳統通信軟件更靈活,更結構化的通信方式。在此自動化機器人系統中使用DTW所發現的好處包括對操作的可見性以及更好的統計分析基礎,以預測未來狀態並優化與機器人單元相關的特徵參數。最後,得出結論,DTW是管理複雜系統的良好基礎,這可能是有益的,因為該特定係統用於研究所的培訓和專業發展。
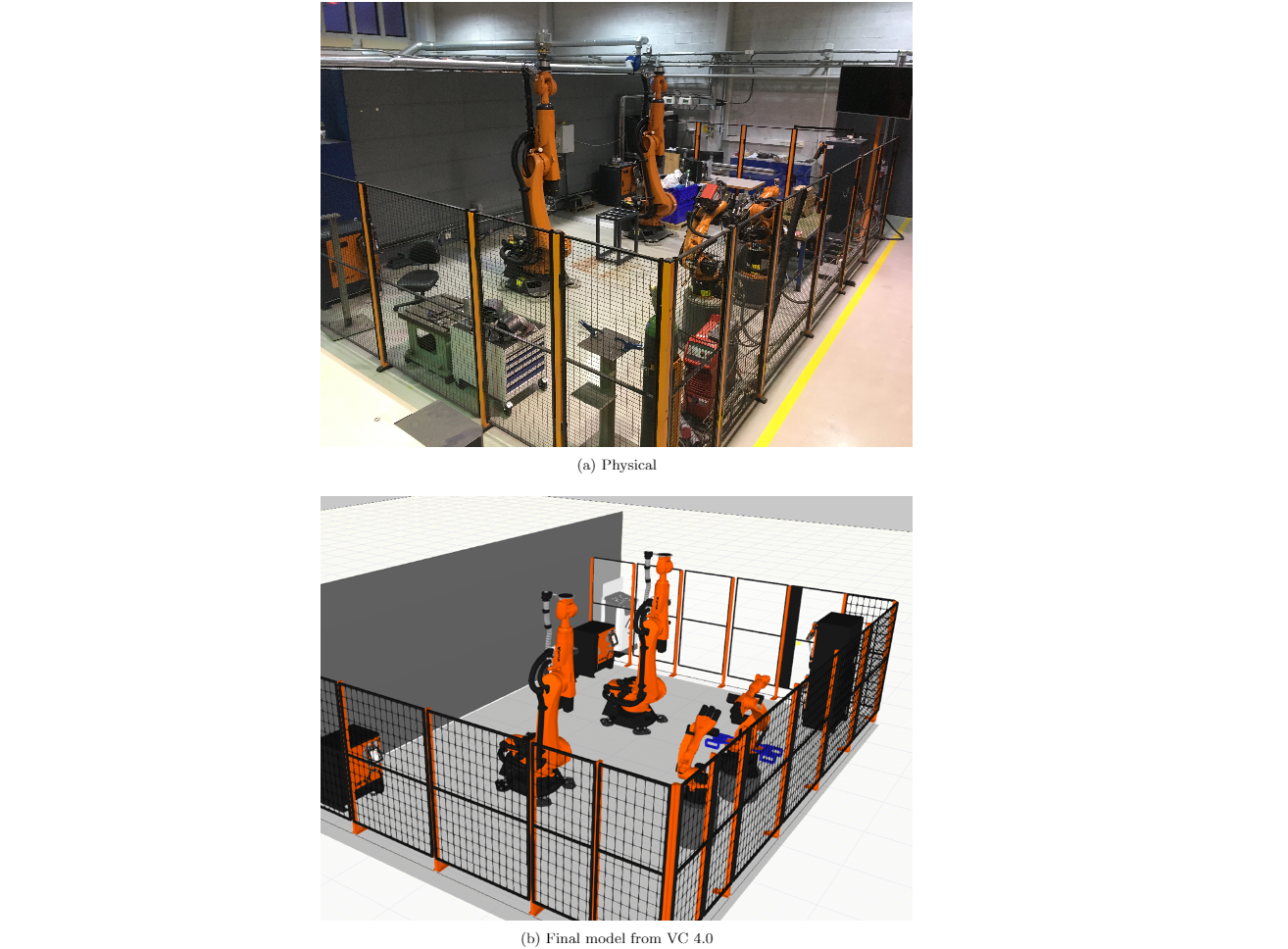
圖1:機器人單元,物理和數字
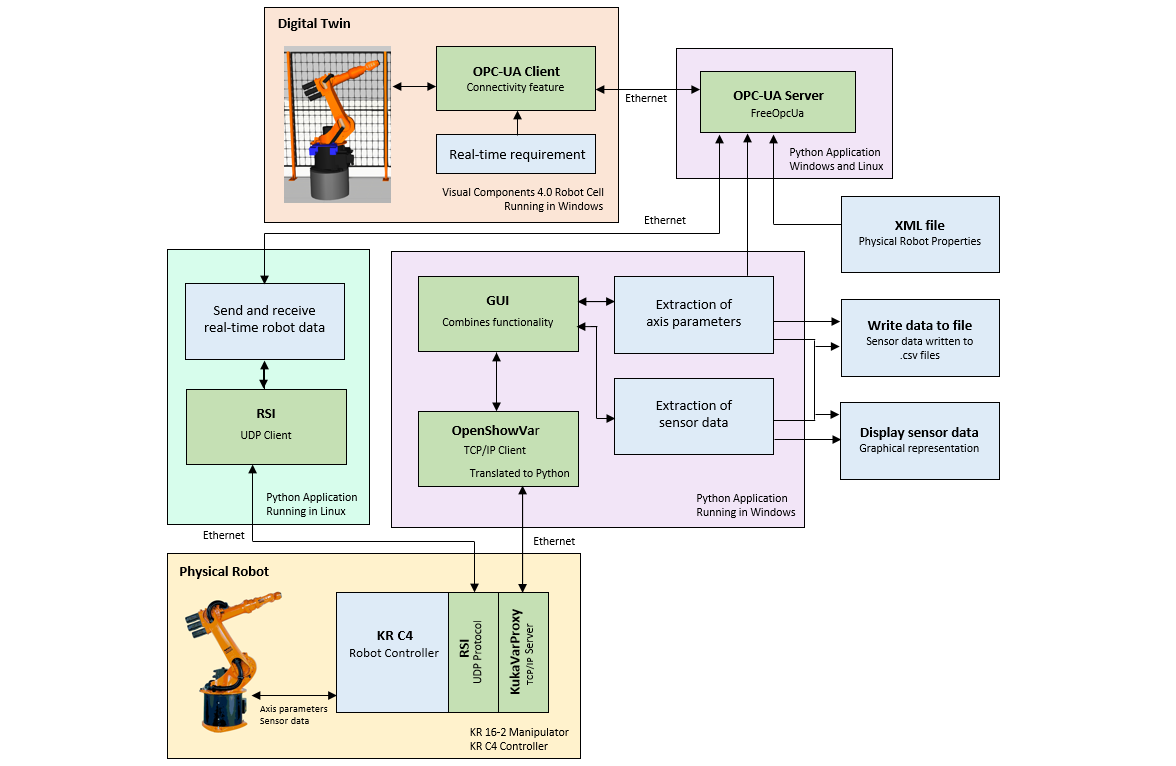 圖2:當前的通信體系結構
圖2:當前的通信體系結構
GUI用於啟動Visual組件4.0 OPC UA連接,顯示機器人傳感器數據並將數據寫入.CSV文件。
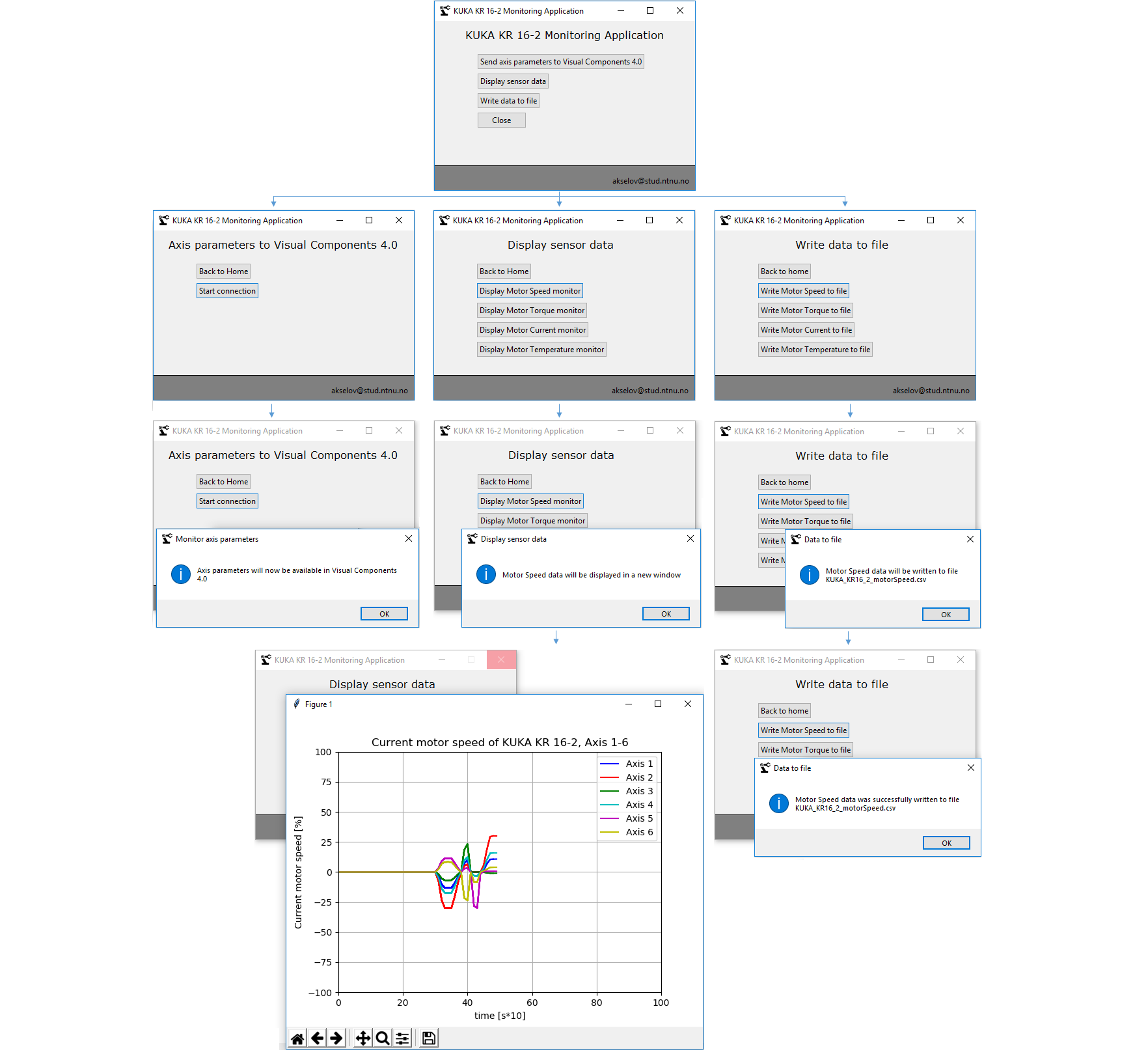 圖3:GUI
圖3:GUI
該庫包含VC 4.0的機器人單元的兩個文件:
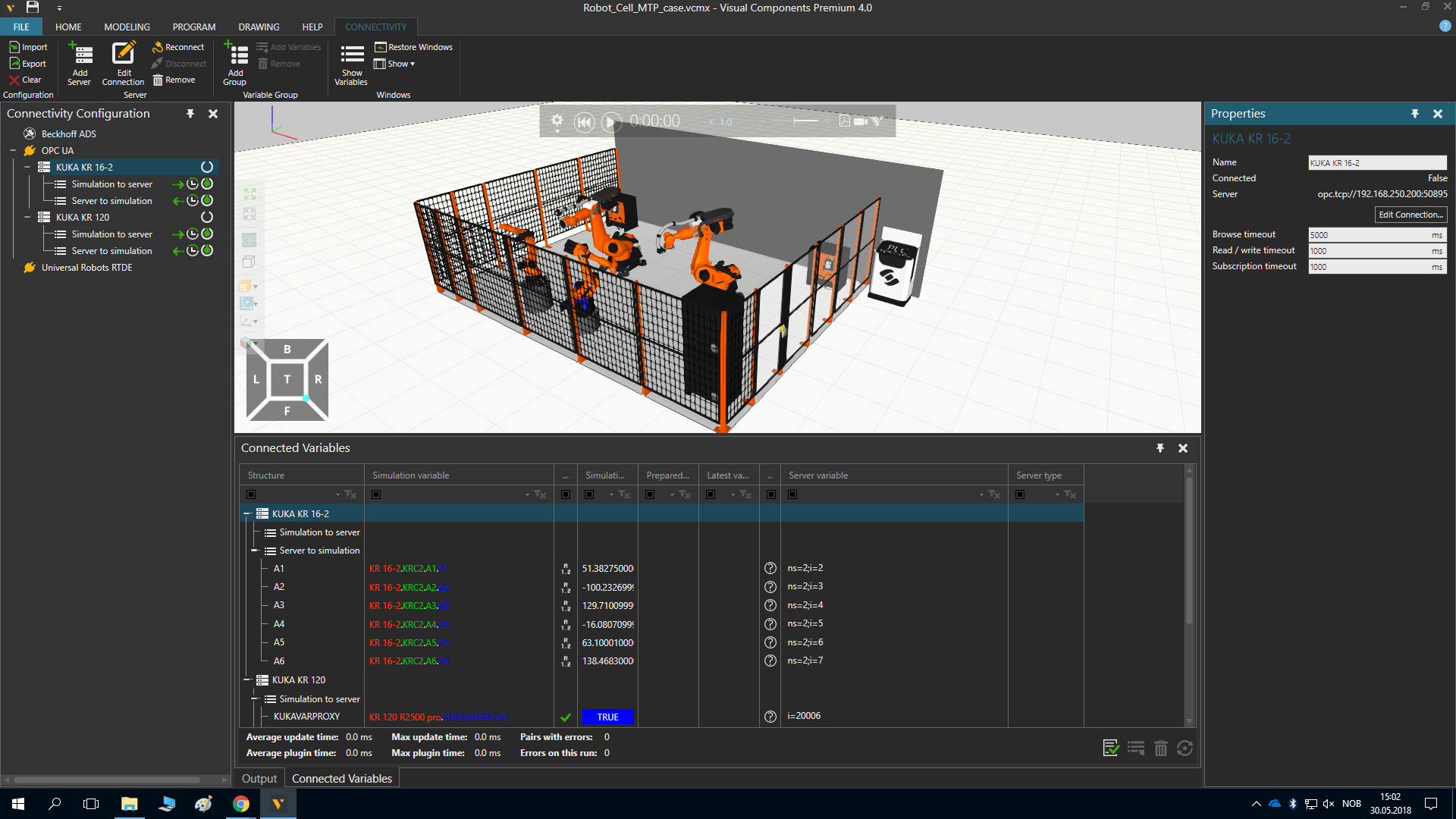 圖4:VC 4.0的屏幕截圖
圖4:VC 4.0的屏幕截圖
該項目中開發的軟件基於工作:


