digital twin opcua
1.0.0
Dieses Repository enthält Dateien, die bei der Entwicklung eines digitalen Zwillings (DTW) für eine Roboterzelle bei NTNU unter Verwendung von visuellen Komponenten 4.0 (VC 4.0) und OPC UA verwendet werden.
Masterarbeit: http://hdl.handle.net/11250/2561319
Klasse: a
Das System enthält derzeit folgende Funktionen:
Es wurde eine feste Hülle mit Kamerabeting durchgeführt, um einige der Funktionen des DTW zu veranschaulichen:
https://youtu.be/xlqhqpmjwla
Weitere Informationen zu Verbesserungen finden Sie im Projektbericht Abschnitt 5.1.2:
http://hdl.handle.net/11250/2561319
Dieses Projekt wurde von der norwegischen Universität für Wissenschaft und Technologie (NTNU), Department of Production Technology, initiiert. Das Ziel des Projekts war das folgende:
Um schnell auf unerwartete Ereignisse und neue Anforderungen ohne umfangreiche Systemänderungen zu reagieren, müssen zukünftige Produktionssysteme unabhängig arbeiten können. Es besteht ein Bedarf an intelligenten Maschinen, die komplexe Aufgaben ohne detaillierte Programmierung und ohne menschliche Interaktion ausführen. Autonome Systeme kennen ihre eigenen Fähigkeiten (die als "Fähigkeiten" und ihren Staat modelliert werden. Sie können zwischen einer Reihe möglicher Aktionen, orchestrieren und ihre Fähigkeiten ausführen. Um erfolgreich zu sein, müssen die autonomen Systeme realistische Modelle des aktuellen Zustands des Produktionsprozesses und des eigenen Verhaltens des Systems in der Interaktion mit seiner externen Umgebung haben - normalerweise als digitaler Zwilling bezeichnet.
OPC Unified Architecture (OPC UA) ist ein plattformunabhängiges Protokoll für die von der OPC Foundation entwickelte industrielle Automatisierung. OPC konzentriert sich auf den Zugriff auf große Mengen an Echtzeitdaten, während die Systemleistung auf ein Minimum beeinflusst wird. Die OPC UA hat das Potenzial, im zukünftigen industriellen Umfeld zu einem wichtigen Grundstein zu werden, in dem Maschinen "Produktion als Service" liefern, und alle Maschinen und Sensoren in der Produktion sind online (Internet of Things).
Bei dieser Aufgabe wird die Implementierung eines digitalen Zwillings untersucht. Es muss eine Lösung entwickelt werden, die eine nahtlose Kommunikation zwischen Robotern, PLS und anderen relevanten Steuerungssystemen bietet, die Teil eines industriellen Produktionssystems sein können, das mit einer digitalen Darstellung des Systems verbunden ist. Das System muss im Roboterlabor des Instituts getestet werden.
a) Beschreiben Sie, wie ein digitaler Zwilling mit OPC UA implementiert werden kann.
b) Untersuchen Sie die Vor- und Nachteile der Verwendung visueller Komponenten 4.0 oder einer ähnlichen Simulationssoftware
für den digitalen Zwilling.
c) Verwenden Sie visuelle Komponenten 4.0 oder eine ähnliche Simulationssoftware, um die Roboterzelle am Institut zu modellieren und zu simulieren.
d) Untersuchen Sie die Vor- und Nachteile der Verwendung von Kukavarproxy und Kuka rsi Ethernet als Middleware
Zwischen den Kuka KR C4 -Robotercontrollern und dem digitalen Zwilling.
e) Präsentieren Sie eine Lösung für einen digitalen Zwilling des Roboterlabors des Instituts unter Verwendung von OPC UA zur Kommunikation.
f) Probieren Sie das System in einem festen Fall aus. Bewerten Sie die Ergebnisse.
Dieses Projekt untersucht den Begriff Industrie 4.0 (I 4.0) und die Verwendung digitaler Zwillinge (DTWs) als Kapital in dieser modernen industriellen Revolution. Ein DTW kann als digitale Nachbildung eines physischen Systems beschrieben werden, einschließlich Daten zu dieser Systeminteraktion mit seiner Umgebung. Ziel dieses Projekts war es, eine DTW für eine Roboterzelle bei MTP Valgrinda, NTNU, zu entwickeln und zu untersuchen, welche Vorteile durch die Einführung der Technologie in diesem System und in der Domäne automatisierter Robotersysteme im Allgemeinen erzielt werden können.
Der DTW wurde unter Verwendung der OPC UA -Kommunikationsarchitektur entwickelt. OPC UA wird als Pionier von I 4.0 bezeichnet, da es sich um eine Kommunikationsarchitektur handelt, die auf die Standardisierung der Kommunikation in der Industrie abzielt. Es wurden drei verschiedene Visualisierungssoftwarelösungen verglichen. Es wurde der Schluss gezogen, dass visuelle Komponenten 4.0 (VC 4.0) der stärkste Kandidat für die Entwicklung einer visuellen Darstellung der Roboterzelle waren. Die Verwendung von VC 4.0 und OPC UA A DTW der Roboterzelle wurde erstellt.
Die meisten Arbeiten in diesem Projekt drehten sich darum, Kommunikationsmodule zu erstellen, die die physische Roboterzelle mit der virtuellen Darstellung in VC 4.0 durch die Verwendung von OPC UA verbinden konnten. Das Ergebnis dieser Arbeit ist eine Kommunikationsbibliothek, die die virtuelle Darstellung der Roboterzelle und der verschiedenen Kommunikationsmodule enthält, die der DTW verschiedene Funktionen geben können. Diese Bibliothek wird Open-Source erstellt und kann im Github-Repository des Projekts bei gefunden werden
https://github.com/akselov/digital-twin-opcua
Die in dieser Bibliothek enthaltene Software ermöglicht es dem DTW, die Bewegungen des physischen Roboters in Echtzeit zu spiegeln, Robotersensordaten zu zeichnen und die Roboter aus der DTW zu steuern. Eine grafische Benutzeroberfläche wurde entwickelt, um die Funktionen zu organisieren. Abbildung 2 zeigt die aktuelle Kommunikationsarchitektur für die DTW.
Der DTW wurde in einem festen Fall getestet. Dies war ein Multi-Robot-Fall, einschließlich Spiegelung von Bewegungen, Darstellung von Sensordaten und Kontrolle von VC 4.0. Es wurde ein Video aus dem Fall gemacht, das online unter veröffentlicht wird
https://youtu.be/xlqhqpmjwla
Es wurde der Schluss gezogen, dass OPC UA eine gute Lösung für die Verwendung in diesem DTW war, da es möglich ist, auf jeder Plattform zu implementieren, und eine flexiblere und strukturiertere Kommunikation ermöglicht als herkömmliche Kommunikationssoftware, die in Client/Server -basierten Systemen verwendet wird. Die Vorteile, die bei der Verwendung des DTW in diesem automatisierten Robotersystem zu finden sind, umfassten die Sichtbarkeit von Operationen und eine bessere Grundlage für die statistische Analyse zur Vorhersage zukünftiger Zustände und zur Optimierung charakteristischer Parameter, die mit der Roboterzelle verbunden sind. Schließlich wurde der Schluss gezogen, dass die DTW als gute Grundlage für die Verwaltung eines komplexen Systems fungiert, was bei der Ausbildung und beruflichen Entwicklung am Institut von Vorteil sein könnte.
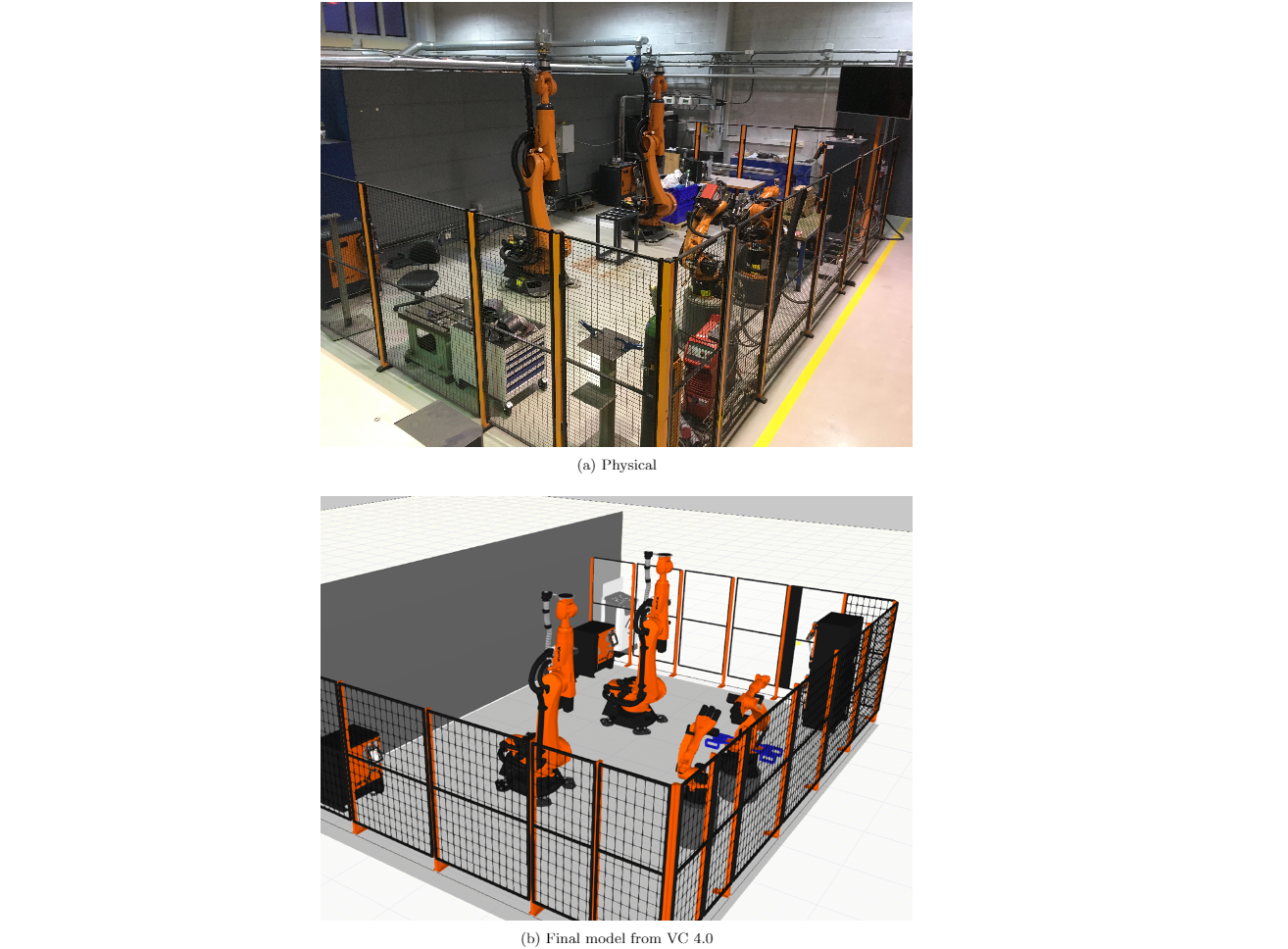
Abbildung 1: Roboterzelle, physisch und digital
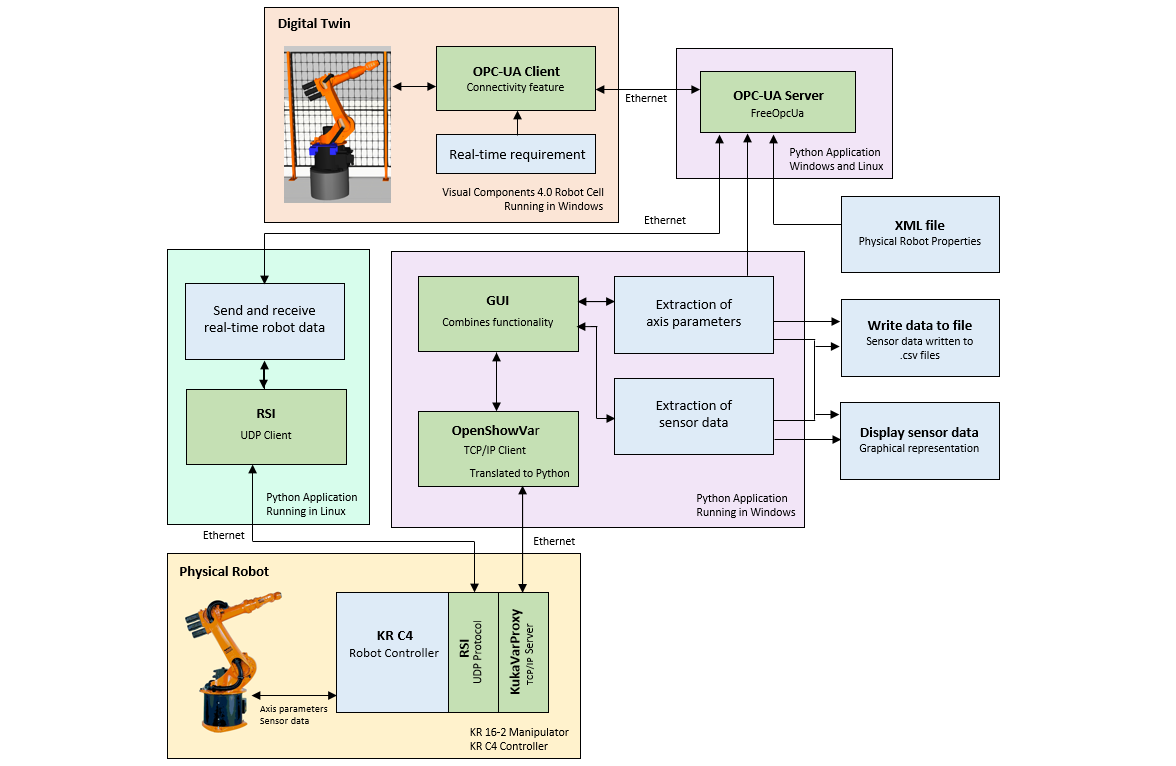 Abbildung 2: Aktuelle Kommunikationsarchitektur
Abbildung 2: Aktuelle Kommunikationsarchitektur
GUI zum Starten visueller Komponenten 4.0 OPC -UA -Verbindung, Anzeige von Robotersensordaten und Schreiben von Daten in .csv -Dateien.
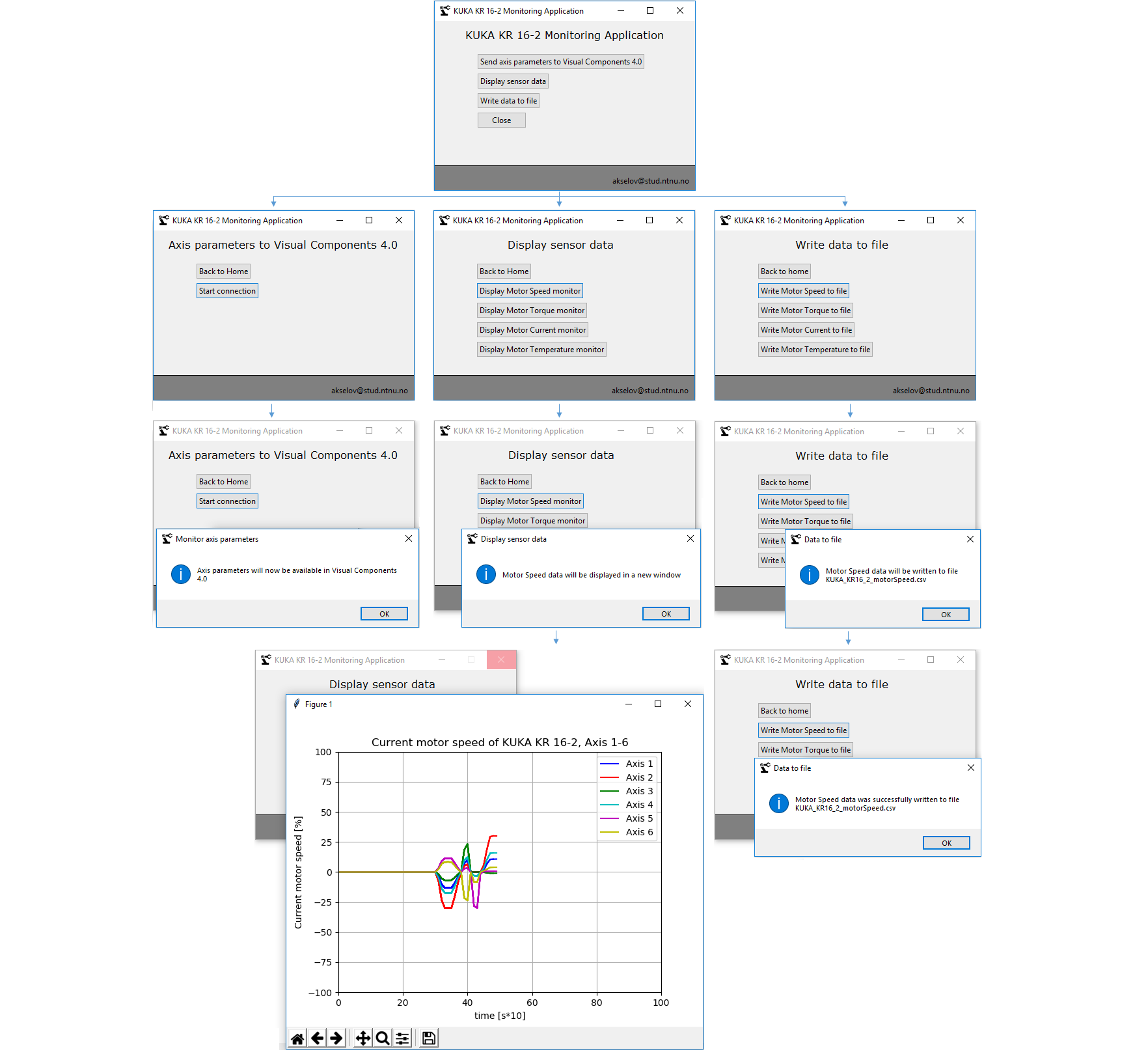 Abbildung 3: GUI
Abbildung 3: GUI
Diese Bibliothek enthält zwei Dateien der Roboterzelle aus VC 4.0:
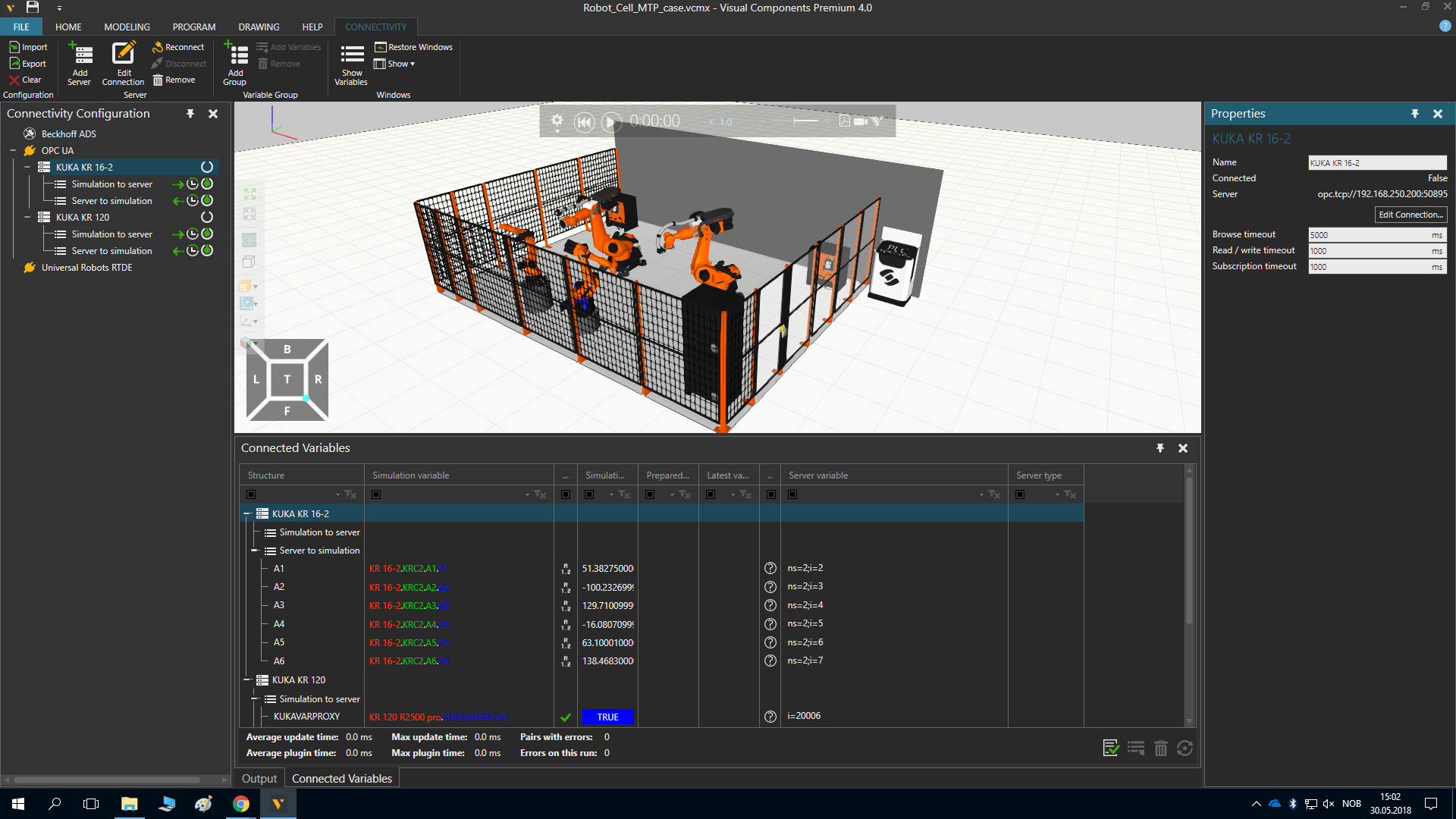 Abbildung 4: Screenshot aus VC 4.0
Abbildung 4: Screenshot aus VC 4.0
Die in diesem Projekt entwickelte Software basiert auf Arbeiten von:


