digital twin opcua
1.0.0
ที่เก็บนี้มีไฟล์ที่ใช้ในการพัฒนา Digital Twin (DTW) สำหรับเซลล์หุ่นยนต์ที่ NTNU ด้วยการใช้ส่วนประกอบภาพ 4.0 (VC 4.0) และ OPC UA
วิทยานิพนธ์ปริญญาโท: http://hdl.handle.net/11250/2561319
เกรด: A
ปัจจุบันระบบมีฟังก์ชั่นต่อไปนี้:
มันทำเคสคงที่ด้วยการติดตามกล้องเพื่อแสดงฟังก์ชันบางอย่างของ DTW:
https://youtu.be/xlqhqpmjwla
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการปรับปรุงดูรายงานโครงการ 5.1.2:
http://hdl.handle.net/11250/2561319
โครงการนี้เริ่มต้นโดยมหาวิทยาลัยวิทยาศาสตร์และเทคโนโลยีนอร์เวย์ (NTNU) ภาควิชาเทคโนโลยีการผลิต เป้าหมายของโครงการมีดังต่อไปนี้:
เพื่อตอบสนองอย่างรวดเร็วต่อเหตุการณ์ที่ไม่คาดคิดและความต้องการใหม่โดยไม่มีการเปลี่ยนแปลงระบบอย่างกว้างขวางระบบการผลิตในอนาคตจะต้องสามารถทำงานได้อย่างอิสระมากขึ้น มีความจำเป็นสำหรับเครื่องอัจฉริยะที่ทำงานที่ซับซ้อนโดยไม่มีการเขียนโปรแกรมอย่างละเอียดและไม่มีการโต้ตอบของมนุษย์ ระบบอิสระรู้ถึงความสามารถของตนเอง (ซึ่งเป็นแบบจำลองเป็น "ทักษะ") และรัฐของพวกเขา พวกเขาสามารถเลือกระหว่างชุดของการกระทำที่เป็นไปได้จัดเตรียมและดำเนินการทักษะของพวกเขา เพื่อให้ประสบความสำเร็จระบบอิสระจะต้องมีแบบจำลองที่สมจริงของสถานะปัจจุบันของกระบวนการผลิตและพฤติกรรมของระบบในการโต้ตอบกับสภาพแวดล้อมภายนอก - มักจะเรียกว่าคู่ดิจิตอล
OPC Unified Architecture (OPC UA) เป็นโปรโตคอลที่ไม่ขึ้นกับแพลตฟอร์มสำหรับการสื่อสารระหว่างเครื่องกับเครื่องจักรสำหรับระบบอัตโนมัติอุตสาหกรรมที่พัฒนาโดยมูลนิธิ OPC OPC มุ่งเน้นไปที่การเข้าถึงข้อมูลเรียลไทม์จำนวนมากในเวลาเดียวกันเนื่องจากประสิทธิภาพของระบบได้รับผลกระทบอย่างน้อยที่สุด OPC UA มีศักยภาพที่จะกลายเป็นรากฐานที่สำคัญในสภาพแวดล้อมอุตสาหกรรมในอนาคตที่เครื่องจักรส่งมอบ "การผลิตเป็นบริการ" และเครื่องจักรและเซ็นเซอร์ทั้งหมดในการผลิตออนไลน์ (Internet of Things)
ในภารกิจนี้จะมีการศึกษาการใช้งานของคู่แฝดดิจิตอล วิธีแก้ปัญหาจะต้องได้รับการพัฒนาที่ให้การสื่อสารที่ไร้รอยต่อระหว่างหุ่นยนต์ PLSS และระบบควบคุมอื่น ๆ ที่เกี่ยวข้องซึ่งสามารถเป็นส่วนหนึ่งของระบบการผลิตอุตสาหกรรมที่เชื่อมโยงกับการแสดงดิจิตอลหนึ่งครั้งของระบบ ระบบจะต้องทดสอบที่ห้องปฏิบัติการหุ่นยนต์ของสถาบัน
a) อธิบายว่าดิจิตอลคู่สามารถนำไปใช้งานได้อย่างไรโดยใช้ OPC UA
b) ตรวจสอบข้อดีและข้อเสียของการใช้ส่วนประกอบภาพ 4.0 หรือซอฟต์แวร์จำลองที่คล้ายกัน
สำหรับ Digital Twin
C) ใช้ส่วนประกอบ Visual 4.0 หรือซอฟต์แวร์จำลองที่คล้ายกันเพื่อจำลองและจำลองเซลล์หุ่นยนต์ที่สถาบัน
d) ตรวจสอบข้อดีและข้อเสียของการใช้ Kukavarproxy และ Kuka RSI Ethernet เป็นมิดเดิลแวร์
ระหว่างคอนโทรลเลอร์หุ่นยนต์ Kuka KR C4 และ Digital Twin
e) นำเสนอโซลูชันสำหรับคู่แฝดดิจิตอลของห้องปฏิบัติการหุ่นยนต์ของสถาบันด้วยการใช้ OPC UA สำหรับการสื่อสาร
f) ลองใช้ระบบในกรณีคงที่ ประเมินผลลัพธ์
โครงการนี้สำรวจคำว่าอุตสาหกรรม 4.0 (i 4.0) และการใช้ฝาแฝดดิจิตอล (DTWs) เป็นสินทรัพย์ในการปฏิวัติอุตสาหกรรมสมัยใหม่นี้ DTW สามารถอธิบายได้ว่าเป็นแบบจำลองดิจิตอลของระบบทางกายภาพรวมถึงข้อมูลเกี่ยวกับการโต้ตอบกับระบบนี้กับสภาพแวดล้อม เป้าหมายของโครงการนี้คือการพัฒนา DTW สำหรับเซลล์หุ่นยนต์ที่ MTP Valgrinda, NTNU และตรวจสอบผลประโยชน์ที่จะได้รับจากการแนะนำเทคโนโลยีในระบบนี้และโดเมนของระบบหุ่นยนต์อัตโนมัติโดยทั่วไป
DTW ได้รับการพัฒนาโดยใช้สถาปัตยกรรมการสื่อสาร OPC UA OPC UA เรียกว่าผู้บุกเบิกของ I 4.0 เนื่องจากเป็นสถาปัตยกรรมการสื่อสารที่มุ่งเน้นการสร้างมาตรฐานการสื่อสารในอุตสาหกรรม เปรียบเทียบโซลูชันซอฟต์แวร์การสร้างภาพข้อมูลที่แตกต่างกันสามแบบ สรุปได้ว่า Visual Components 4.0 (VC 4.0) เป็นผู้สมัครที่แข็งแกร่งที่สุดในการพัฒนาการแสดงภาพของเซลล์หุ่นยนต์ การใช้ VC 4.0 และ OPC UA A DTW ของเซลล์หุ่นยนต์ถูกสร้างขึ้น
งานส่วนใหญ่ที่ทำในโครงการนี้หมุนรอบการสร้างโมดูลการสื่อสารที่สามารถเชื่อมต่อเซลล์หุ่นยนต์ทางกายภาพกับการเป็นตัวแทนเสมือนจริงใน VC 4.0 ผ่านการใช้ OPC UA ผลลัพธ์ของงานนี้คือไลบรารีการสื่อสารที่มีการแสดงเสมือนจริงของเซลล์หุ่นยนต์และโมดูลการสื่อสารที่แตกต่างกันสามารถให้ฟังก์ชันการทำงานที่หลากหลายของ DTW ห้องสมุดนี้ทำโอเพ่นซอร์สและสามารถพบได้ในที่เก็บ GitHub ของโครงการที่
https://github.com/akselov/digital-twin-opcua
ซอฟต์แวร์ที่รวมอยู่ในห้องสมุดนี้ช่วยให้ DTW สามารถทำมิเรอร์แบบเรียลไทม์ของการเคลื่อนไหวของหุ่นยนต์ทางกายภาพการพล็อตข้อมูลเซ็นเซอร์หุ่นยนต์และควบคุมหุ่นยนต์จาก DTW ส่วนต่อประสานผู้ใช้กราฟิกได้รับการพัฒนาเพื่อจัดระเบียบฟังก์ชัน รูปที่ 2 แสดงสถาปัตยกรรมการสื่อสารปัจจุบันสำหรับ DTW
DTW ได้รับการทดสอบในกรณีคงที่ นี่เป็นกรณีหลายหุ่นยนต์รวมถึงการมิเรอร์ของการเคลื่อนไหวการพล็อตข้อมูลเซ็นเซอร์และการควบคุมจาก VC 4.0 มันถูกสร้างวิดีโอจากกรณีที่เผยแพร่ทางออนไลน์ที่
https://youtu.be/xlqhqpmjwla
สรุปได้ว่า OPC UA เป็นทางออกที่ดีสำหรับการใช้งานใน DTW นี้เนื่องจากเป็นไปได้ที่จะนำไปใช้กับแพลตฟอร์มใด ๆ และเปิดใช้งานวิธีการสื่อสารที่ยืดหยุ่นและมีโครงสร้างมากกว่าซอฟต์แวร์การสื่อสารแบบดั้งเดิมที่ใช้ในระบบไคลเอนต์/เซิร์ฟเวอร์ ประโยชน์ที่พบกับการใช้ DTW ในระบบหุ่นยนต์อัตโนมัตินี้รวมถึงการมองเห็นการปฏิบัติงานและรากฐานที่ดีกว่าสำหรับการวิเคราะห์ทางสถิติเพื่อทำนายสถานะในอนาคตและเพื่อเพิ่มประสิทธิภาพพารามิเตอร์ลักษณะที่เกี่ยวข้องกับเซลล์หุ่นยนต์ ในที่สุดก็สรุปได้ว่า DTW ทำหน้าที่เป็นรากฐานที่ดีสำหรับการจัดการระบบที่ซับซ้อนสิ่งที่อาจเป็นประโยชน์เนื่องจากระบบเฉพาะนี้ใช้ในการฝึกอบรมและการพัฒนาวิชาชีพที่สถาบัน
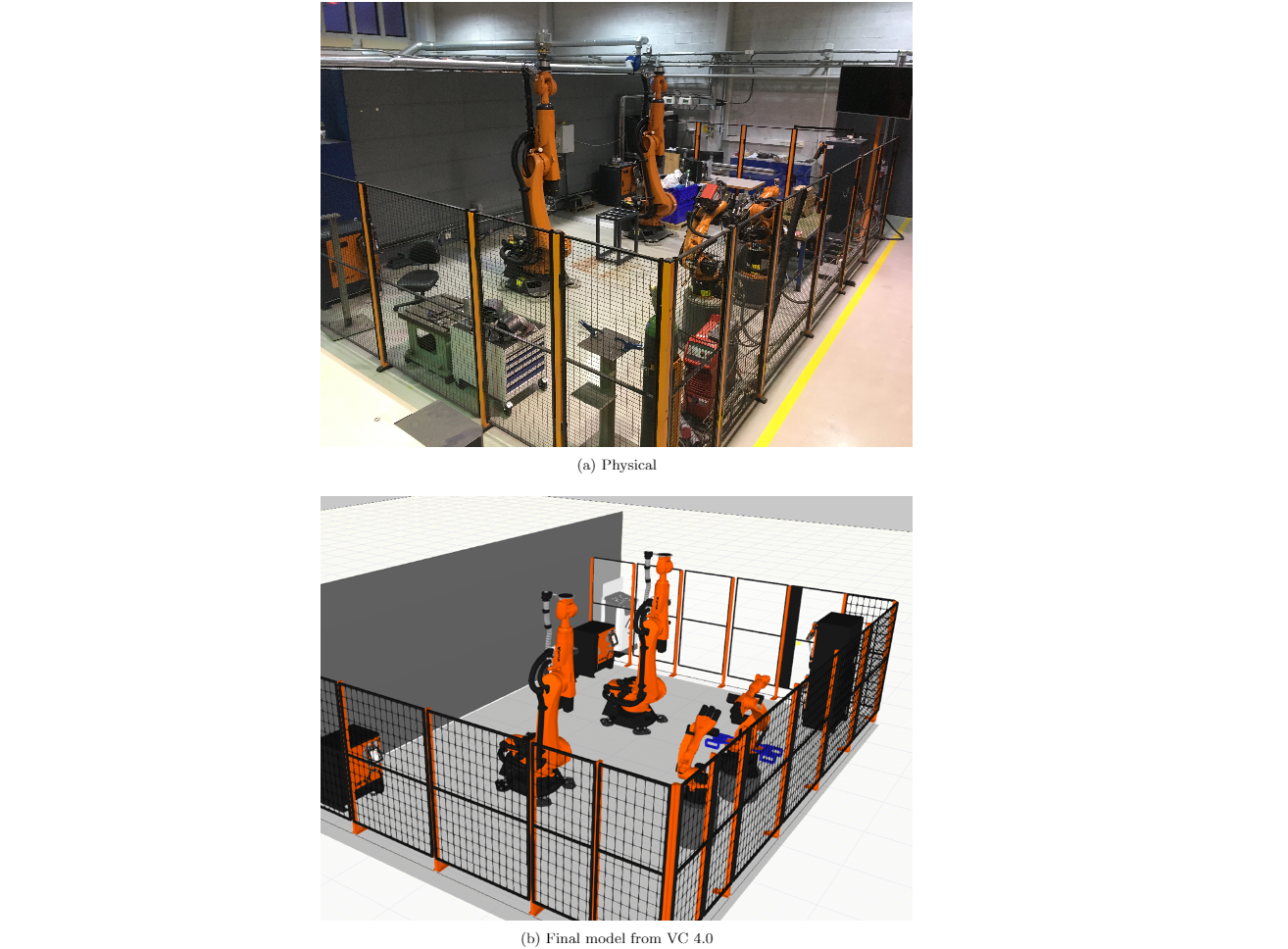
รูปที่ 1: เซลล์หุ่นยนต์กายภาพและดิจิตอล
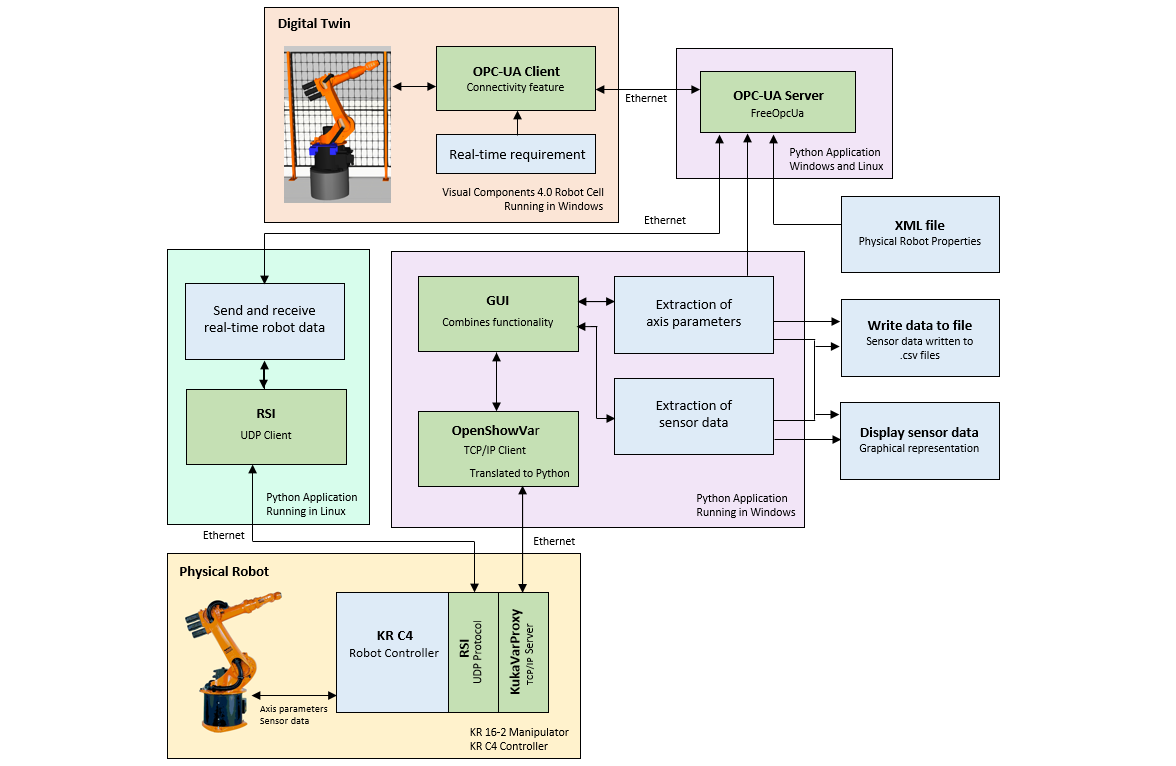 รูปที่ 2: สถาปัตยกรรมการสื่อสารในปัจจุบัน
รูปที่ 2: สถาปัตยกรรมการสื่อสารในปัจจุบัน
GUI สำหรับการเปิดตัว Visual Components 4.0 การเชื่อมต่อ OPC UA แสดงข้อมูลเซ็นเซอร์หุ่นยนต์และเขียนข้อมูลไปยังไฟล์. csv
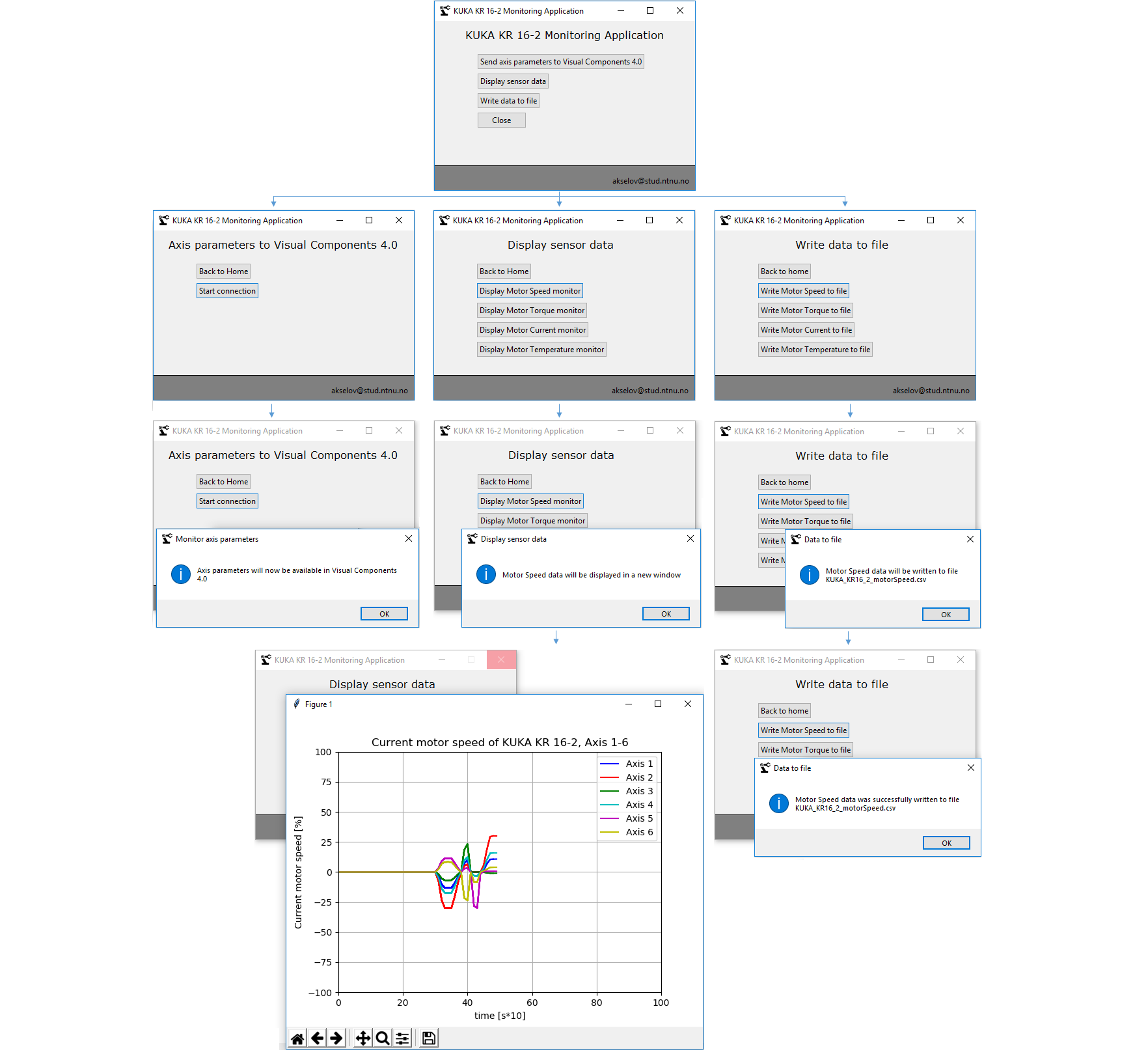 รูปที่ 3: GUI
รูปที่ 3: GUI
ไลบรารีนี้มีสองไฟล์ของเซลล์หุ่นยนต์จาก VC 4.0:
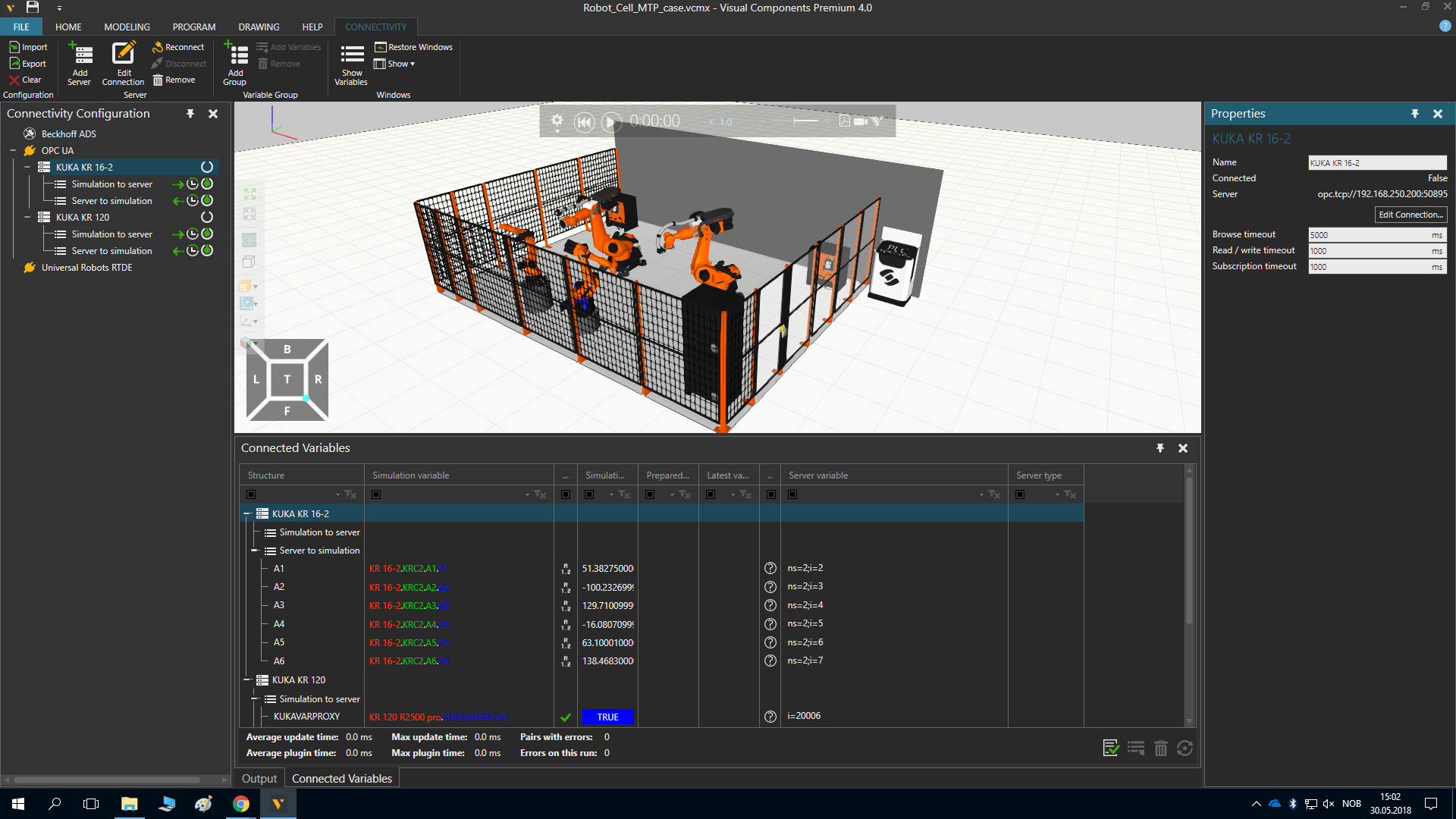 รูปที่ 4: ภาพหน้าจอจาก VC 4.0
รูปที่ 4: ภาพหน้าจอจาก VC 4.0
ซอฟต์แวร์ที่พัฒนาในโครงการนี้ขึ้นอยู่กับงานโดย:


