digital twin opcua
1.0.0
이 저장소에는 시각적 구성 요소 4.0 (VC 4.0) 및 OPC UA를 사용하여 NTNU의 로봇 셀에 대한 디지털 트윈 (DTW) 개발에 사용되는 파일이 포함되어 있습니다.
마스터의 논문 : http://hdl.handle.net/11250/2561319
학년 : a
시스템에는 현재 다음 기능이 포함되어 있습니다.
DTW의 기능 중 일부를 설명하기 위해 카메라 추적으로 고정 된 케이스를 수행했습니다.
https://youtu.be/xlqhqpmjwla
개선 사항에 대한 자세한 내용은 프로젝트 보고서 섹션 5.1.2를 참조하십시오.
http://hdl.handle.net/11250/2561319
이 프로젝트는 생산 기술부 노르웨이 과학 기술 대학 (NTNU)에 의해 시작되었습니다. 프로젝트의 목표는 다음과 같습니다.
광범위한 시스템 변경없이 예기치 않은 이벤트 및 새로운 요구에 신속하게 대응하려면 미래의 생산 시스템은보다 독립적으로 작동 할 수 있어야합니다. 자세한 프로그래밍과 사람의 상호 작용없이 복잡한 작업을 수행하는 지능형 기계가 필요합니다. 자율 시스템은 자신의 능력 ( "기술"으로 모델링)과 상태를 알고 있습니다. 그들은 가능한 행동 세트 중에서 선택할 수 있고, 조율 및 기술을 수행 할 수 있습니다. 성공하기 위해서는 자율 시스템은 현재 생산 공정 상태의 현실적인 모델과 외부 환경과의 상호 작용 (일반적으로 디지털 트윈)이라고하는 시스템 자체 행동을 가지고 있어야합니다.
OPC UNIFIED ARCHISCH (OPC UA)는 OPC 재단이 개발 한 산업 자동화를위한 기계 간 통신을위한 플랫폼 독립적 프로토콜입니다. OPC는 시스템 성능이 최소에 영향을받는 것과 동시에 많은 양의 실시간 데이터에 액세스하는 데 중점을 둡니다. OPC UA는 기계가 "서비스로 생산"을 제공하는 미래의 산업 환경에서 중요한 기반이 될 수 있으며 생산의 모든 기계와 센서는 온라인 (사물 인터넷)입니다.
이 작업에서 디지털 트윈의 구현이 연구 될 것입니다. 로봇, PLS 및 시스템의 하나의 디지털 표현과 연결된 산업 생산 시스템의 일부가 될 수있는 기타 관련 제어 시스템 간의 원활한 통신을 제공하는 솔루션을 개발해야합니다. 시스템은 연구소 로봇 실험실에서 테스트해야합니다.
a) OPC UA를 사용하여 디지털 트윈을 구현할 수있는 방법을 설명하십시오.
b) Visual Components 4.0 또는 유사한 시뮬레이션 소프트웨어 사용의 장점과 단점을 조사하십시오.
디지털 트윈의 경우.
c) 시각적 구성 요소 4.0 또는 이와 유사한 시뮬레이션 소프트웨어를 사용하여 연구소에서 로봇 셀을 모델링하고 시뮬레이션하십시오.
d) kukavarproxy와 kuka rsi 이더넷 사용의 장점과 단점을 미들웨어로 조사하십시오.
Kuka KR C4 로봇 컨트롤러와 디지털 트윈 사이.
e) 커뮤니케이션을 위해 OPC UA를 사용하여 연구소 로봇 실험실의 디지털 트윈을위한 솔루션을 제시합니다.
f) 고정 된 케이스에서 시스템을 시험해보십시오. 결과를 평가하십시오.
이 프로젝트는이 현대 산업 혁명의 자산으로서 산업 4.0 (I 4.0)이라는 용어와 DTW (Digital Twins)의 사용을 탐구합니다. DTW는이 시스템과의 환경과의 상호 작용에 대한 데이터를 포함하여 물리적 시스템의 디지털 복제본으로 설명 될 수 있습니다. 이 프로젝트의 목표는 NTNU의 MTP Valgrinda에서 로봇 셀에 대한 DTW를 개발 하고이 시스템에서 기술과 자동화 된 로봇 시스템의 도메인을 도입함으로써 어떤 이점을 얻을 수 있는지 조사하는 것이 었습니다.
DTW는 OPC UA 통신 아키텍처를 사용하여 개발되었습니다. OPC UA는 업계의 커뮤니케이션 표준화를 목표로하는 커뮤니케이션 아키텍처이므로 I 4.0의 선구자라고합니다. 세 가지 다른 시각화 소프트웨어 솔루션을 비교했습니다. 시각적 구성 요소 4.0 (VC 4.0)은 로봇 셀의 시각적 표현을 개발하기위한 가장 강력한 후보라고 결론 지었다. 로봇 셀의 VC 4.0 및 OPC UA A DTW를 사용하여 생성되었습니다.
이 프로젝트에서 수행 된 대부분의 작업은 OPC UA를 사용하여 실제 로봇 셀을 VC 4.0의 가상 표현에 연결할 수있는 통신 모듈을 만드는 데 중점을 두었습니다. 이 작업의 결과는 로봇 셀의 가상 표현과 DTW에 다양한 기능을 제공 할 수있는 다양한 통신 모듈을 포함하는 통신 라이브러리입니다. 이 라이브러리는 오픈 소스로 만들어졌으며 프로젝트의 Github 저장소에서 찾을 수 있습니다.
https://github.com/akselov/digital-twin-opcua
이 라이브러리에 포함 된 소프트웨어를 통해 DTW는 물리적 로봇의 움직임을 실시간으로 미러링하고 로봇 센서 데이터를 플로팅하며 DTW의 로봇을 제어 할 수 있습니다. 기능을 구성하기 위해 그래픽 사용자 인터페이스가 개발되었습니다. 그림 2는 DTW의 현재 통신 아키텍처를 보여줍니다.
DTW는 고정 된 경우에서 테스트되었습니다. 이것은 움직임의 미러링, 센서 데이터 플로팅 및 VC 4.0의 제어를 포함한 다중 로봇 케이스였습니다. 온라인으로 출판되는 케이스의 비디오로 만들어졌습니다.
https://youtu.be/xlqhqpmjwla
OPC UA는 모든 플랫폼에서 구현할 수 있으므로이 DTW에서 사용하기위한 좋은 솔루션이며 클라이언트/서버 기반 시스템에 사용되는 기존의 통신 소프트웨어보다보다 유연하고 구조화 된 통신 방법을 가능하게하고 있습니다. 이 자동화 된 로봇 시스템에서 DTW를 사용하면서 발견 된 이점에는 미래 상태를 예측하고 로봇 셀과 관련된 특성 매개 변수를 최적화하기위한 운영에 대한 가시성과 통계 분석을위한 더 나은 토대가 포함되었습니다. 마지막으로, DTW는 복잡한 시스템을 관리하기위한 훌륭한 토대로 작용한다는 결론을 내렸다.이 특정 시스템은 연구소의 교육 및 전문성 개발에 사용되기 때문에 유익 할 수있는 것입니다.
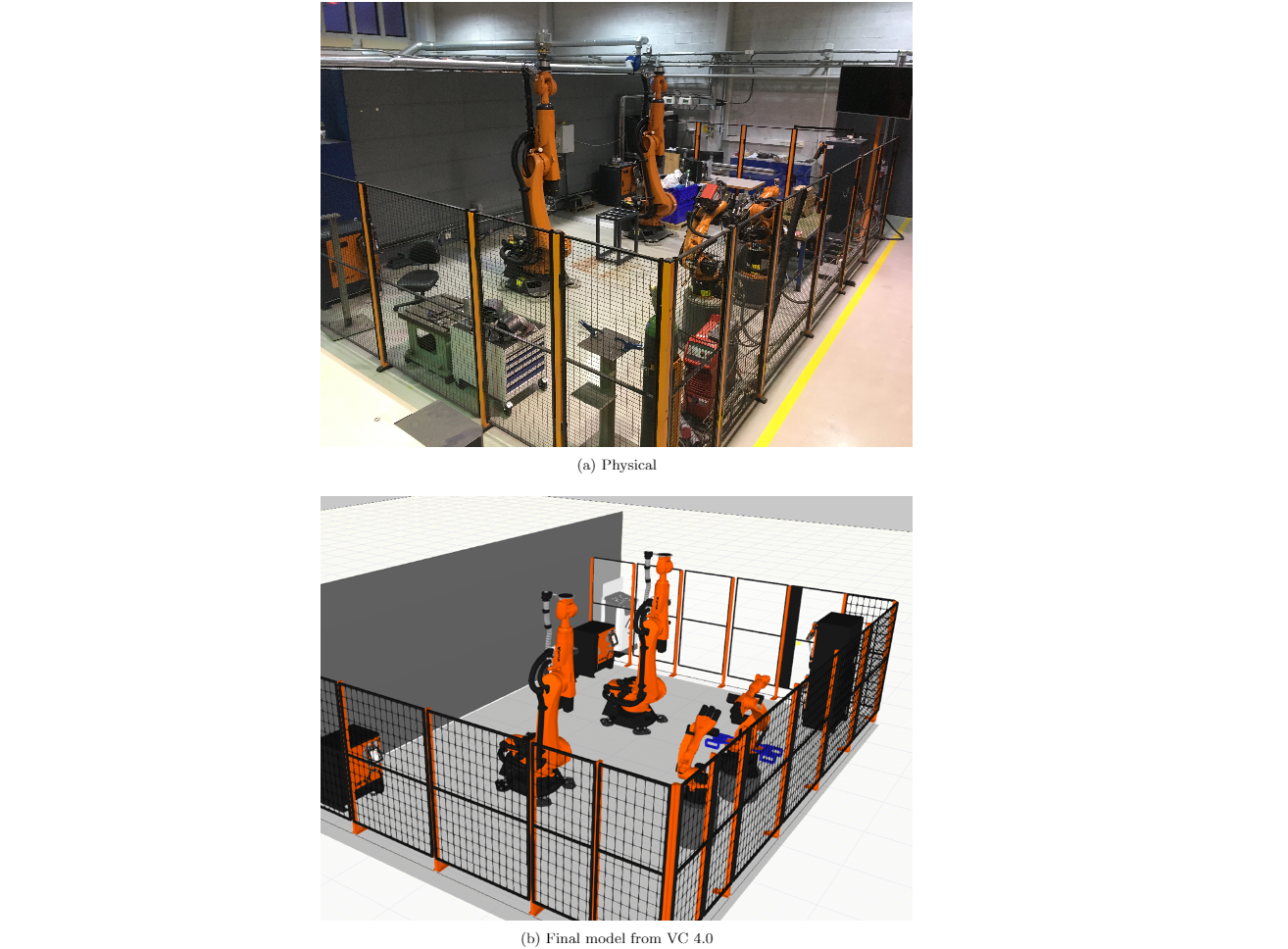
그림 1 : 로봇 셀, 물리적 및 디지털
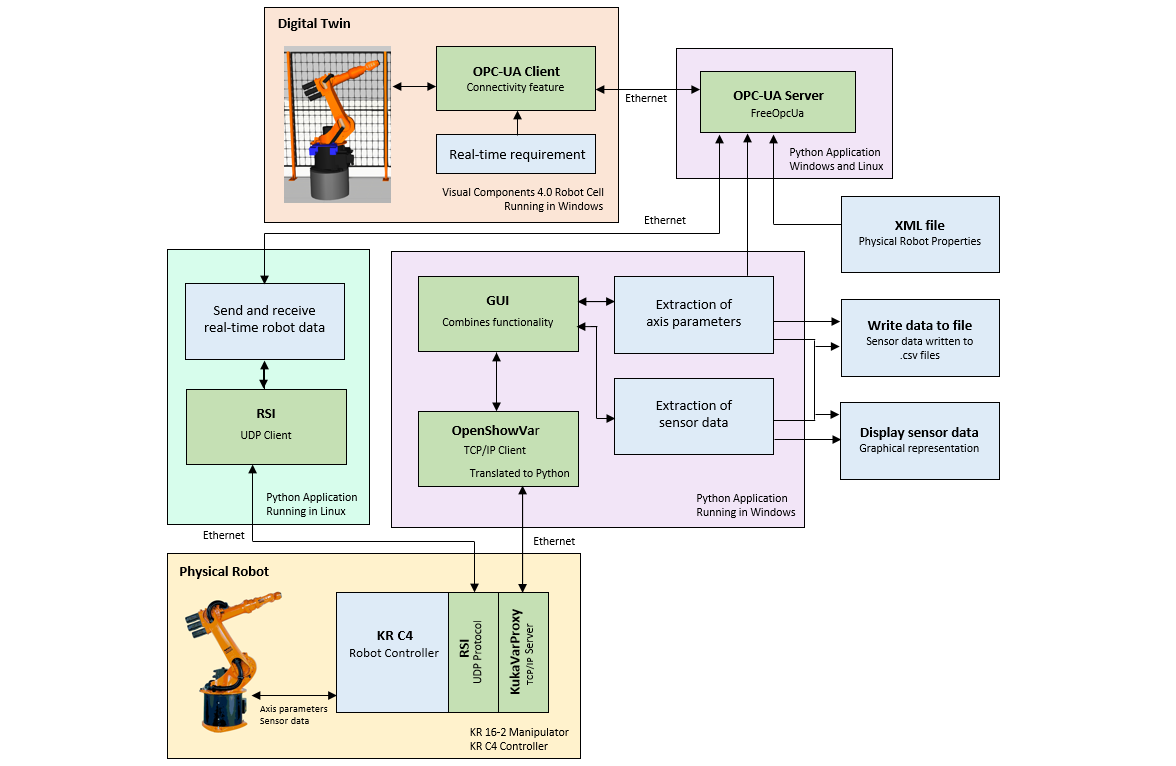 그림 2 : 현재 커뮤니케이션 아키텍처
그림 2 : 현재 커뮤니케이션 아키텍처
시각적 구성 요소를 시작하기위한 GUI 4.0 OPC UA 연결, 로봇 센서 데이터를 표시하고 .CSV 파일에 데이터를 작성합니다.
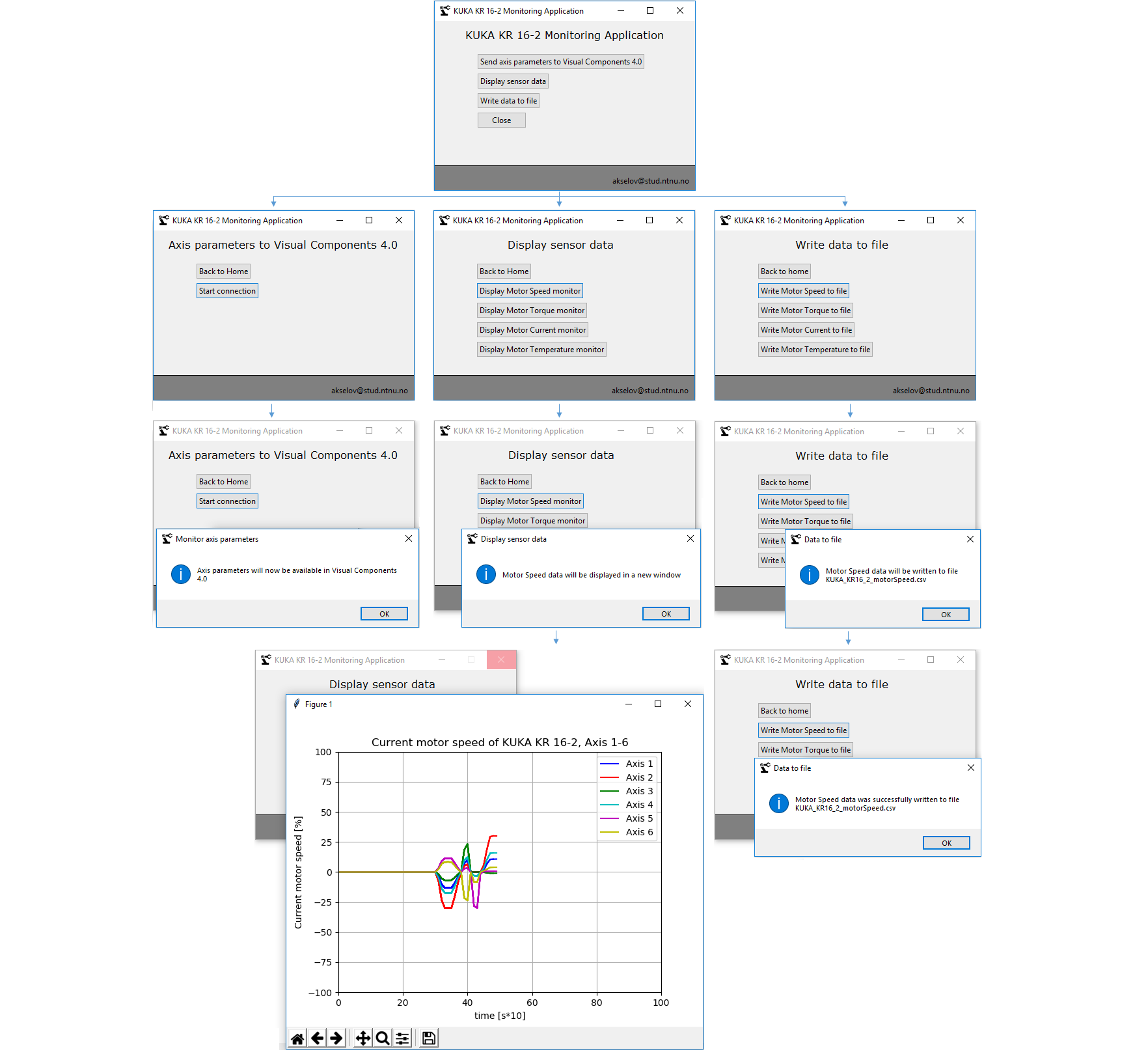 그림 3 : GUI
그림 3 : GUI
이 라이브러리에는 VC 4.0의 로봇 셀의 두 파일이 포함되어 있습니다.
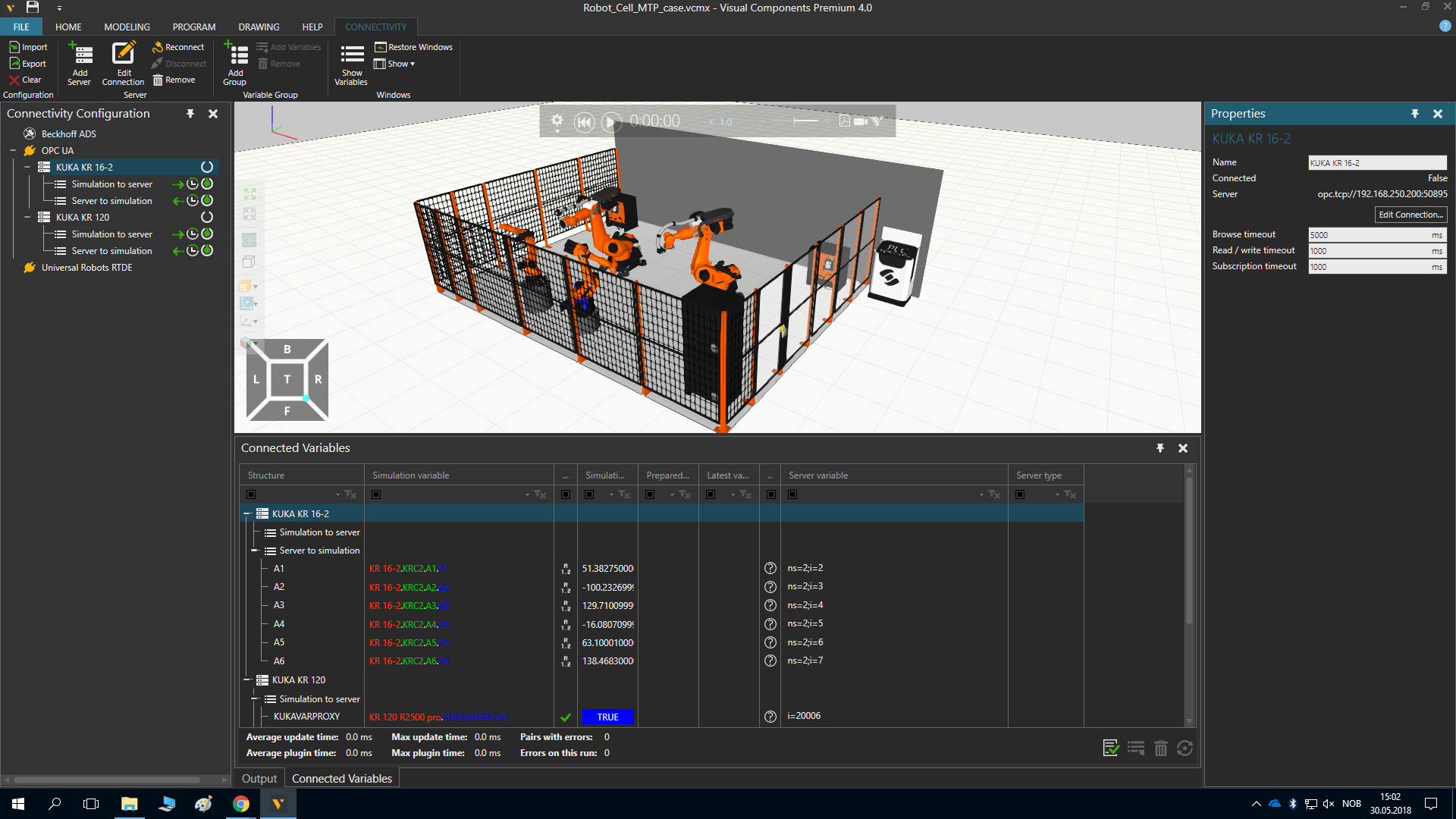 그림 4 : VC 4.0의 스크린 샷
그림 4 : VC 4.0의 스크린 샷
이 프로젝트에서 개발 된 소프트웨어는 작업을 기반으로합니다.


