digital twin opcua
1.0.0
Ce référentiel contient des fichiers utilisés dans le développement d'un jumeau numérique (DTW) pour une cellule de robot à NTNU avec l'utilisation de composants visuels 4.0 (VC 4.0) et OPC UA.
Thèse de maîtrise: http://hdl.handle.net/11250/2561319
Grade: A
Le système contient actuellement les fonctionnalités suivantes:
Il a été fait un boîtier fixe avec le suivi de la caméra pour illustrer certaines des fonctionnalités du DTW:
https://youtu.be/xlqhqpmjwla
Pour plus d'informations sur les améliorations, consultez la section 5.1.2 du rapport du projet:
http://hdl.handle.net/11250/2561319
Ce projet a été lancé par l'Université norvégienne des sciences et de la technologie (NTNU), Département de technologie de production. L'objectif du projet était le suivant:
Afin de répondre rapidement aux événements inattendus et aux nouvelles demandes sans changements de système approfondis, les futurs systèmes de production doivent être en mesure de travailler plus indépendamment. Il y a un besoin de machines intelligentes qui effectuent des tâches complexes sans programmation détaillée et sans interaction humaine. Les systèmes autonomes connaissent leurs propres capacités (qui sont modélisées comme des «compétences») et leur état. Ils sont capables de choisir entre un ensemble d'actions possibles, d'orchestrer et d'effectuer leurs compétences. Pour réussir, les systèmes autonomes doivent avoir des modèles réalistes de l'état actuel du processus de production et le propre comportement du système en interaction avec son environnement externe - généralement appelé jumeau numérique.
OPC Unified Architecture (OPC UA) est un protocole indépendant de la plate-forme pour la communication machine à machine pour l'automatisation industrielle développée par la Fondation OPC. OPC se concentre sur l'accès à de grandes quantités de données en temps réel en même temps que les performances du système sont affectées au minimum. OPC UA a le potentiel de devenir une base importante dans le futur environnement industriel où les machines fournissent "la production en tant que service", et toutes les machines et capteurs en production sont en ligne (Internet des objets).
Dans cette tâche, la mise en œuvre d'un jumeau numérique sera étudiée. Une solution doit être développée qui fournit une communication transparente entre les robots, les PLS et d'autres systèmes de contrôle pertinents qui peuvent faire partie d'un système de production industriel, lié à une représentation numérique du système. Le système doit être testé au laboratoire des robots de l'Institut.
a) Décrivez comment un jumeau numérique peut être implémenté à l'aide d'OPC UA.
b) Examiner les avantages et les inconvénients de l'utilisation des composants visuels 4.0 ou un logiciel de simulation similaire
pour le jumeau numérique.
c) Utilisez des composants visuels 4.0 ou un logiciel de simulation similaire pour modéliser et simuler la cellule du robot à l'Institut.
d) Examiner les avantages et les inconvénients de l'utilisation de Kukavarproxy et Kuka RSI Ethernet comme middleware
Entre les contrôleurs de robots Kuka KR C4 et le jumeau numérique.
e) Présenter une solution pour un jumeau numérique du laboratoire de robots de l'institut avec l'utilisation de l'OPC UA pour la communication.
f) Essayez le système dans un cas fixe. Évaluer les résultats.
Ce projet explore le terme industrie 4.0 (I 4.0) et l'utilisation de jumeaux numériques (DTW) comme actif dans cette révolution industrielle moderne. Un DTW peut être décrit comme une réplique numérique d'un système physique comprenant des données sur l'interaction des systèmes avec son environnement. L'objectif de ce projet a été de développer un DTW pour une cellule de robot au MTP Valgrinda, NTNU, et d'étudier les avantages pour l'introduction de la technologie de ce système et le domaine des systèmes robotiques automatisés en général.
Le DTW a été développé à l'aide de l'architecture de communication OPC UA. OPC UA est appelé le pionnier de I 4.0 car il s'agit d'une architecture de communication visant à la normalisation de la communication dans l'industrie. Trois solutions de logiciels de visualisation différentes ont été comparées. Il a été conclu que les composants visuels 4.0 (VC 4.0) étaient le candidat le plus fort pour développer une représentation visuelle de la cellule du robot. En utilisant VC 4.0 et OPC UA, un DTW de la cellule robot a été créé.
La plupart des travaux effectués dans ce projet tournaient autour de la création de modules de communication capables de connecter la cellule de robot physique à la représentation virtuelle dans VC 4.0, grâce à l'utilisation de l'OPC UA. Le résultat de ce travail est une bibliothèque de communication contenant la représentation virtuelle de la cellule du robot et les différents modules de communication capables de donner au DTW diverses fonctionnalités. Cette bibliothèque est rendue ouverte et peut être trouvée dans le référentiel GitHub du projet à
https://github.com/akselov/digital-twin-opcua
Le logiciel inclus dans cette bibliothèque permet au DTW de faire la mise en miroir en temps réel des mouvements du robot physique, le traçage des données de capteurs robotiques et le contrôle des robots à partir du DTW. Une interface utilisateur graphique a été développée pour organiser les fonctionnalités. La figure 2 illustre l'architecture de communication actuelle du DTW.
Le DTW a été testé dans un cas fixe. Il s'agissait d'un boîtier multi-robot comprenant la mise en miroir des mouvements, le traçage des données du capteur et le contrôle de VC 4.0. Il a été réalisé une vidéo à partir de l'affaire publiée en ligne à
https://youtu.be/xlqhqpmjwla
Il a été conclu que l'OPC UA était une bonne solution à utiliser dans ce DTW car il est possible de mettre en œuvre sur n'importe quelle plate-forme, et permet une manière de communication plus flexible et structurée que les logiciels de communication traditionnels utilisés dans les systèmes basés sur le client / le serveur. Les avantages trouvés avec l'utilisation du DTW dans ce système robotique automatisé comprenaient la visibilité des opérations et une meilleure base d'analyse statistique pour prédire les états futurs et pour optimiser les paramètres caractéristiques associés à la cellule robot. Enfin, il a été conclu que le DTW agit comme une bonne base pour la gestion d'un système complexe, ce qui pourrait être bénéfique car ce système spécifique est utilisé dans la formation et le développement professionnel à l'Institut.
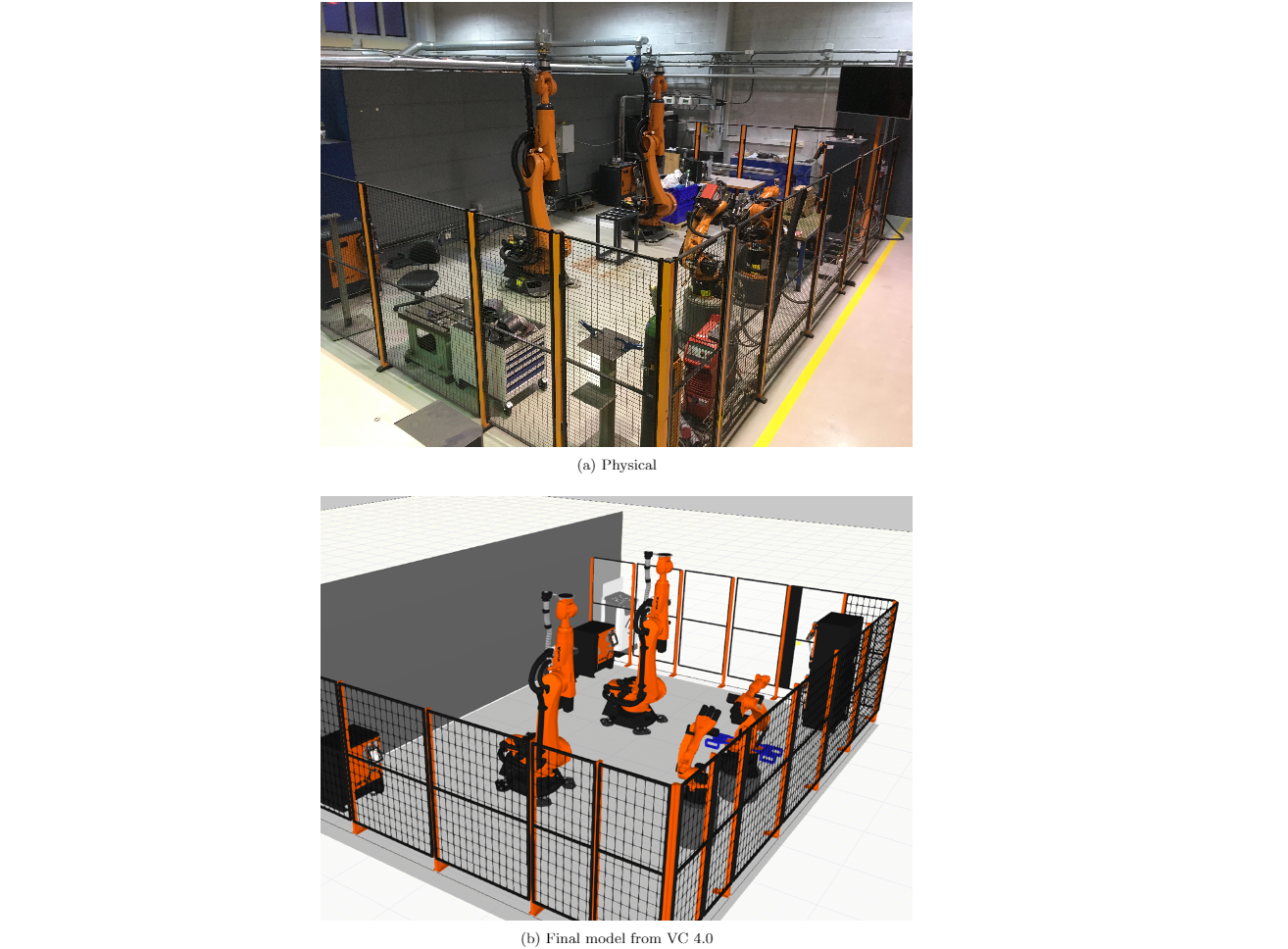
Figure 1: cellule robot, physique et numérique
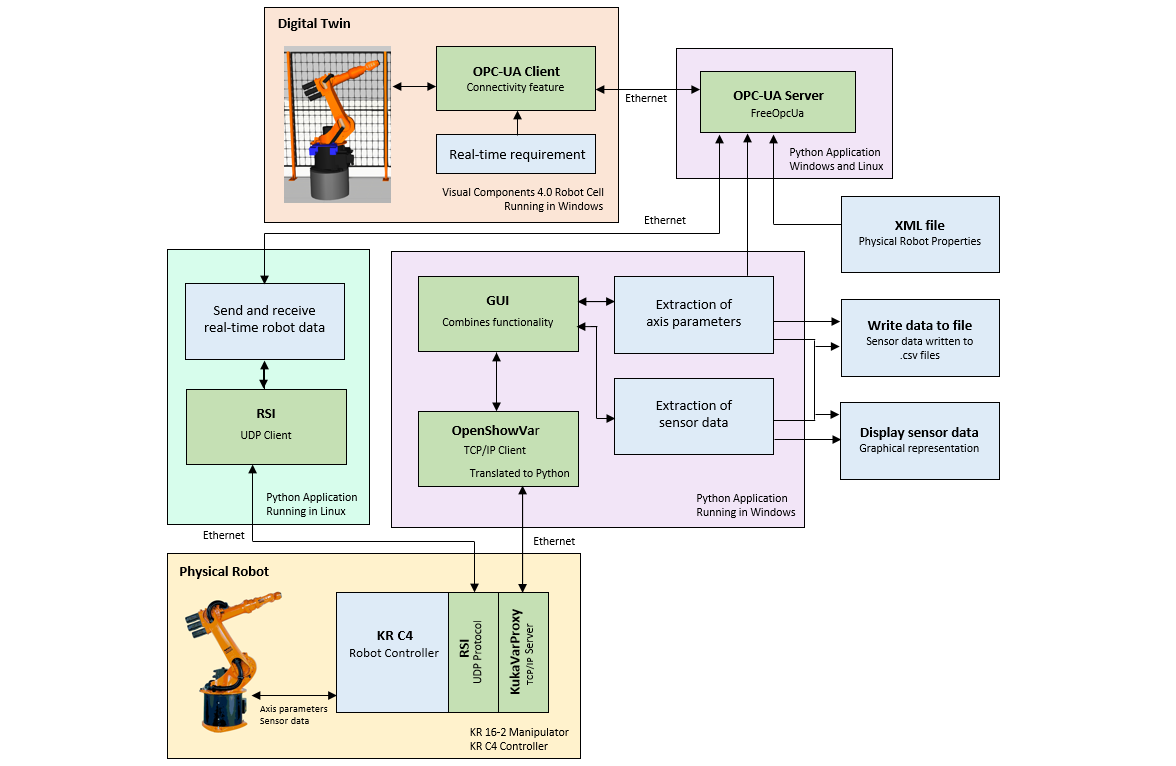 Figure 2: Architecture de communication actuelle
Figure 2: Architecture de communication actuelle
GUI pour le lancement de la connexion OPC UA Components Visual 4.0, affichant des données du capteur robot et écrivant des données sur les fichiers .csv.
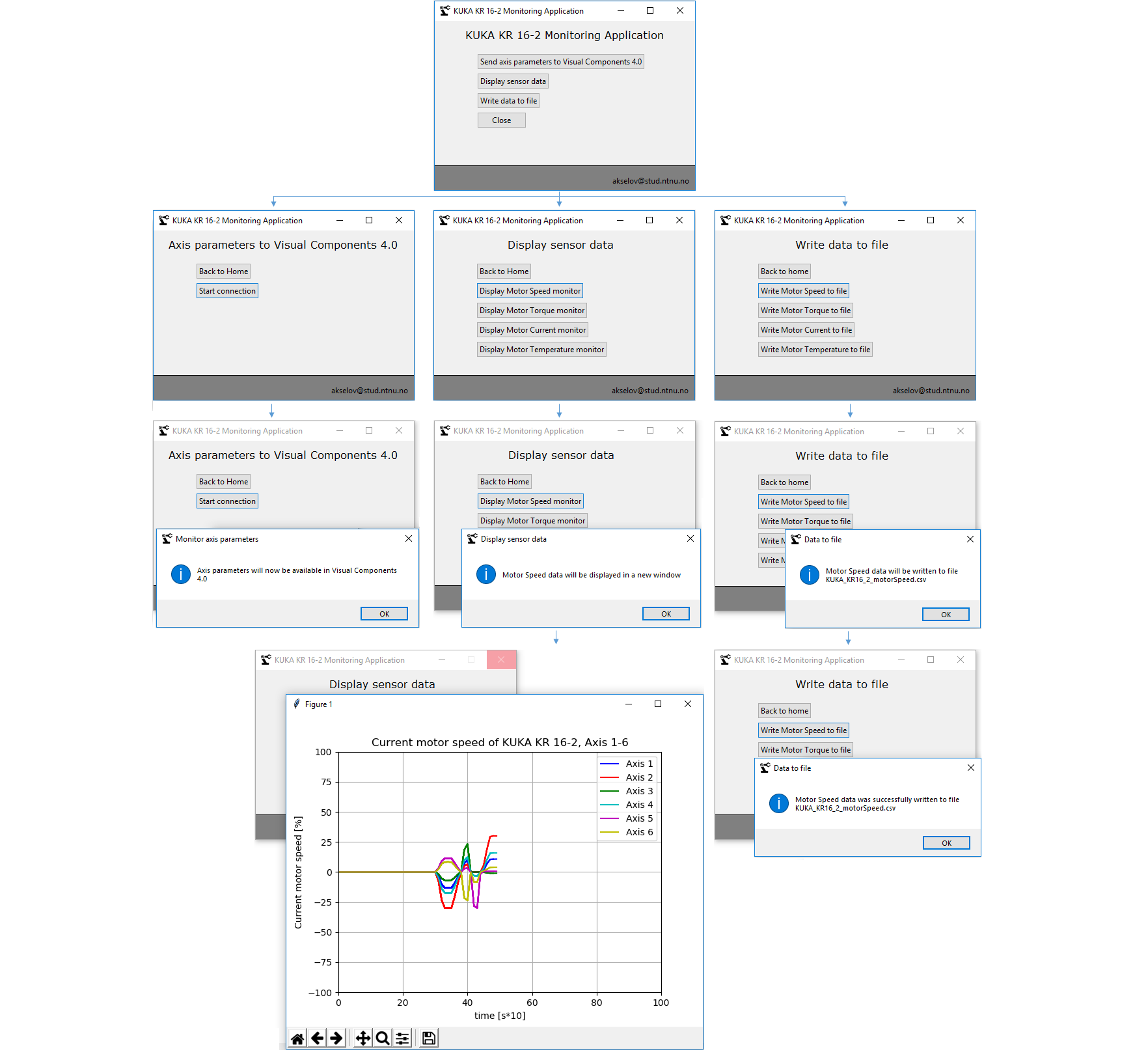 Figure 3: GUI
Figure 3: GUI
Cette bibliothèque contient deux fichiers de la cellule du robot à partir de VC 4.0:
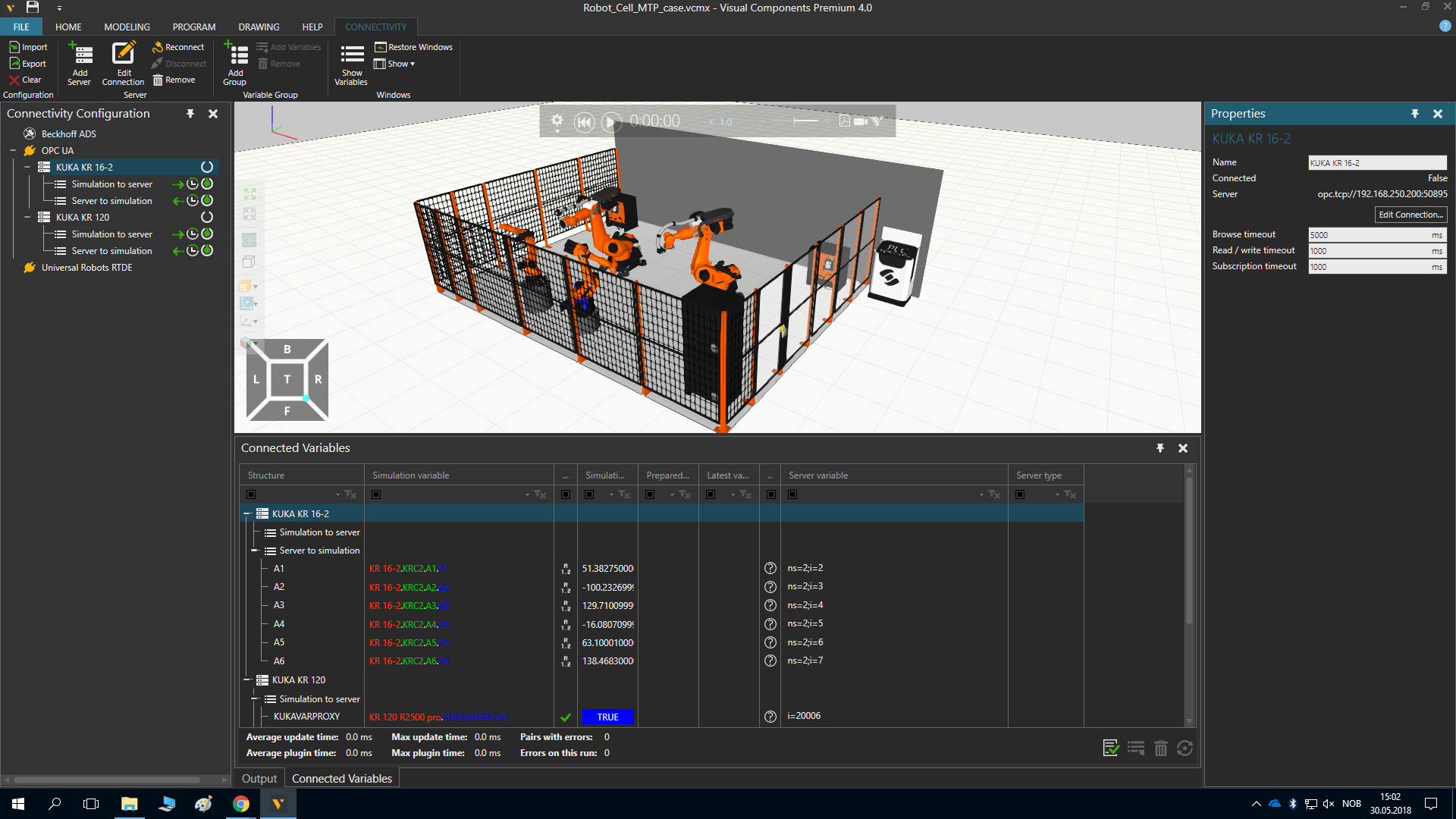 Figure 4: Capture d'écran de VC 4.0
Figure 4: Capture d'écran de VC 4.0
Le logiciel développé dans ce projet est basé sur les travaux par:


