digital twin opcua
1.0.0
Este repositorio contiene archivos utilizados en el desarrollo de un gemelo digital (DTW) para una celda robot en NTNU con el uso de componentes visuales 4.0 (VC 4.0) y OPC UA.
Tesis de maestría: http://hdl.handle.net/11250/2561319
Grado: A
El sistema actualmente contiene la siguiente funcionalidad:
Se realizó una caja fija con el seguimiento de la cámara para ilustrar algunas de las funcionalidades del DTW:
https://youtu.be/xlqhqpmjwla
Para obtener más información sobre mejoras, consulte el informe del proyecto Sección 5.1.2:
http://hdl.handle.net/11250/2561319
Este proyecto fue iniciado por la Universidad de Ciencia y Tecnología de Noruega (NTNU), Departamento de Tecnología de Producción. El objetivo del proyecto fue el siguiente:
Para responder rápidamente a eventos inesperados y nuevas demandas sin cambios extensos en el sistema, los sistemas de producción futuros deben poder trabajar de manera más independiente. Existe la necesidad de máquinas inteligentes que realicen tareas complejas sin programación detallada y sin interacción humana. Los sistemas autónomos conocen sus propias habilidades (que se modelan como "habilidades") y su estado. Pueden elegir entre un conjunto de posibles acciones, orquestar y realizar sus habilidades. Para tener éxito, los sistemas autónomos deben tener modelos realistas del estado actual del proceso de producción y el comportamiento del sistema en la interacción con su entorno externo, generalmente llamado gemelo digital.
OPC Unified Architecture (OPC UA) es un protocolo independiente de la plataforma para la comunicación de máquina a máquina para la automatización industrial desarrollada por la Fundación OPC. OPC se centra en acceder a grandes cantidades de datos en tiempo real al mismo tiempo que el rendimiento del sistema se ve afectado al mínimo. OPC UA tiene el potencial de convertirse en una base importante en el futuro entorno industrial donde las máquinas entregan "producción como servicio", y todas las máquinas y sensores en la producción están en línea (Internet de las cosas).
En esta tarea, se estudiará la implementación de un gemelo digital. Se debe desarrollar una solución que proporcione una comunicación perfecta entre robots, PLSS y otros sistemas de control relevantes que pueden formar parte de un sistema de producción industrial, vinculado a una representación digital del sistema. El sistema debe ser probado en el Laboratorio Robot del Instituto.
a) Describa cómo se puede implementar un gemelo digital utilizando OPC UA.
b) examinar las ventajas y desventajas del uso de componentes visuales 4.0 o un software de simulación similar
para el gemelo digital.
c) Use componentes visuales 4.0 o software de simulación similar para modelar y simular la celda robot en el instituto.
d) Examine las ventajas y desventajas del uso de Kukavarproxy y Kuka RSI Ethernet como middleware
entre los controladores de robot Kuka KR C4 y el gemelo digital.
e) Presente una solución para un gemelo digital del Laboratorio Robot del Instituto con el uso de OPC UA para la comunicación.
f) Pruebe el sistema en una caja fija. Evaluar los resultados.
Este proyecto explora el término Industry 4.0 (I 4.0) y el uso de gemelos digitales (DTW) como un activo en esta revolución industrial moderna. Un DTW puede describirse como una réplica digital de un sistema físico que incluye datos sobre esta interacción de sistemas con su entorno. El objetivo de este proyecto ha sido desarrollar un DTW para una célula robot en MTP Valgrinda, NTNU, e investigar qué beneficios se podrían obtener al introducir la tecnología en este sistema y el dominio de los sistemas robóticos automatizados en general.
El DTW se desarrolló utilizando la arquitectura de comunicación OPC UA. OPC UA se llama pionero de I 4.0, ya que es una arquitectura de comunicación con el objetivo de la estandarización de la comunicación en la industria. Se compararon tres soluciones de software de visualización diferentes. Se concluyó que los componentes visuales 4.0 (VC 4.0) era el candidato más fuerte para desarrollar una representación visual de la célula robot. Se creó el uso de VC 4.0 y OPC UA A DTW de la célula robot.
La mayor parte del trabajo realizado en este proyecto giró en torno a la creación de módulos de comunicación capaces de conectar la celda de robot físico a la representación virtual en VC 4.0, mediante el uso de OPC UA. El resultado de este trabajo es una biblioteca de comunicación que contiene la representación virtual de la celda robot y los diferentes módulos de comunicación capaces de dar al DTW varias funcionalidades. Esta biblioteca se realiza de código abierto y se puede encontrar en el repositorio de GitHub del proyecto en
https://github.com/akselov/digital-twin-opcua
El software incluido en esta biblioteca permite que el DTW realice la reflejo en tiempo real de los movimientos del robot físico, trazando datos de sensores robóticos y controlando los robots desde el DTW. Se desarrolló una interfaz gráfica de usuario para organizar las funcionalidades. La Figura 2 ilustra la arquitectura de comunicación actual para el DTW.
El DTW se probó en una caja fija. Este fue un caso de múltiples robots que incluye la reflejo de movimientos, trazado de datos del sensor y control de VC 4.0. Se hizo un video del caso que se publica en línea en
https://youtu.be/xlqhqpmjwla
Se concluyó que OPC UA era una buena solución para su uso en este DTW, ya que es posible implementarse en cualquier plataforma, y está permitiendo una forma de comunicación más flexible y estructurada que el software de comunicación tradicional utilizado en los sistemas basados en el cliente/servidor. Los beneficios encontrados con el uso del DTW en este sistema robótico automatizado incluyeron visibilidad a las operaciones y una mejor base para el análisis estadístico para predecir estados futuros y para optimizar los parámetros característicos asociados con la célula robot. Finalmente, se concluyó que el DTW actúa como una buena base para administrar un sistema complejo, algo que podría ser beneficioso ya que este sistema específico se utiliza en capacitación y desarrollo profesional en el Instituto.
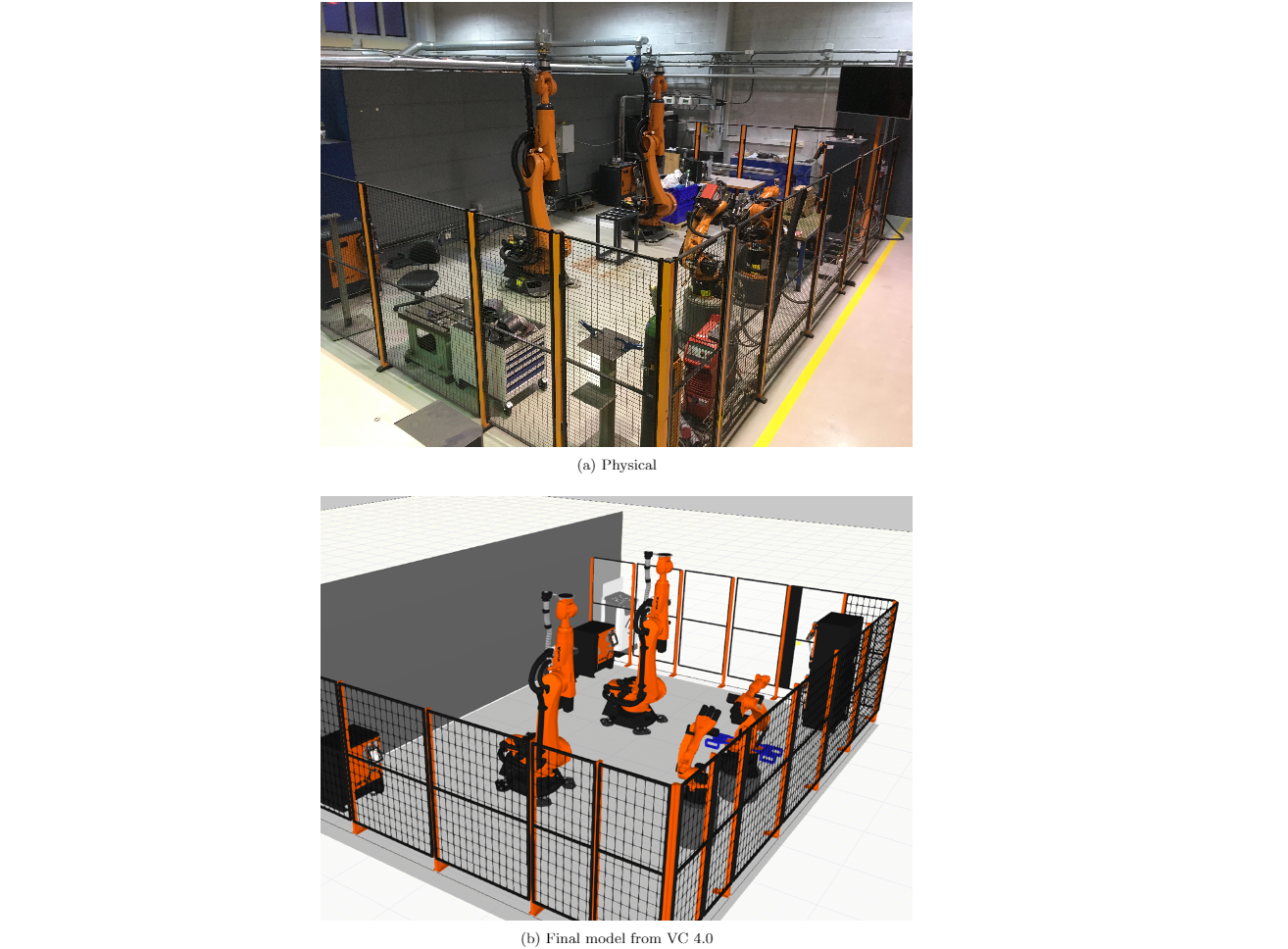
Figura 1: Robot Cell, Física y Digital
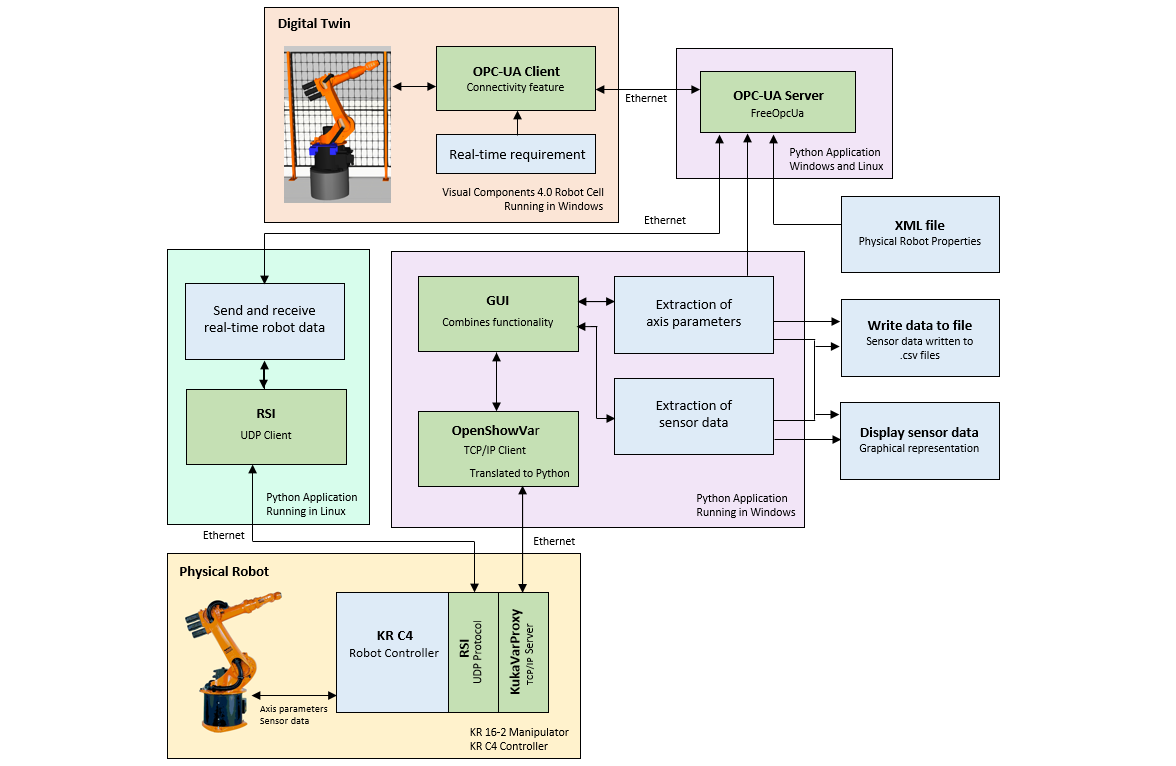 Figura 2: Arquitectura de comunicación actual
Figura 2: Arquitectura de comunicación actual
GUI para el lanzamiento de la conexión Visual Components 4.0 OPC UA, mostrando datos del sensor de robot y escribiendo datos en archivos .csv.
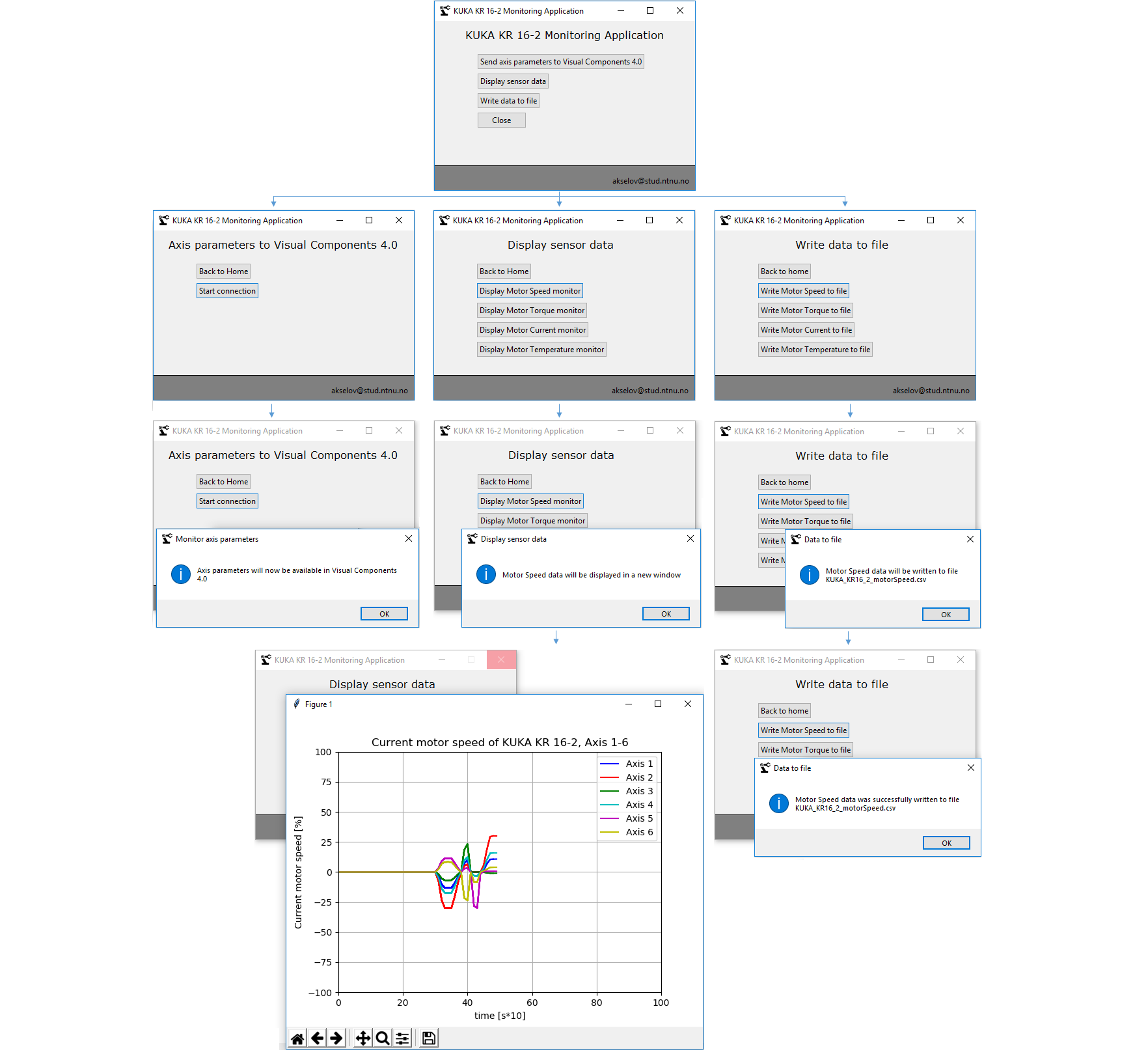 Figura 3: GUI
Figura 3: GUI
Esta biblioteca contiene dos archivos de la celda robot de VC 4.0:
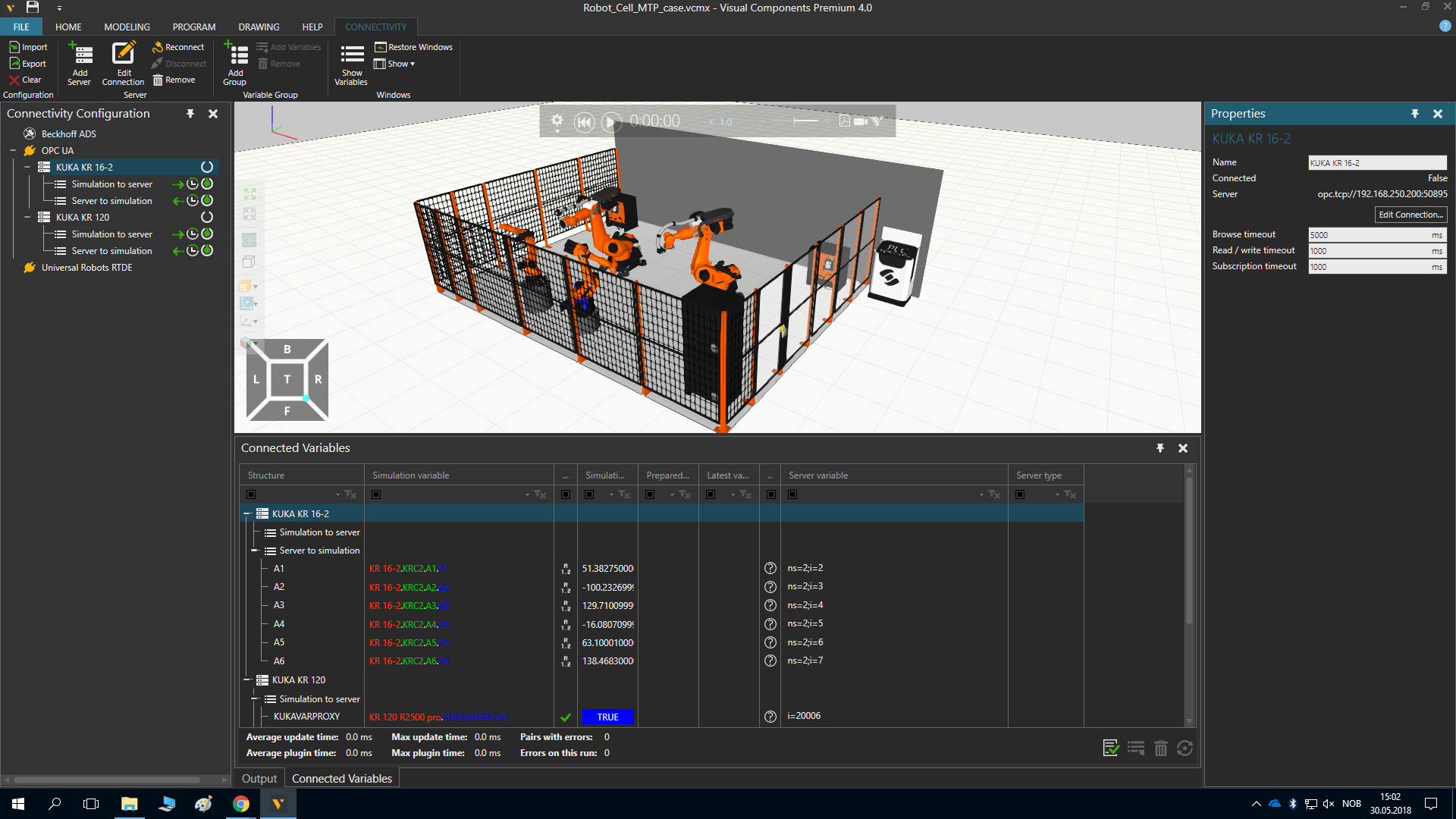 Figura 4: Captura de pantalla de VC 4.0
Figura 4: Captura de pantalla de VC 4.0
El software desarrollado en este proyecto se basa en el trabajo de:


