digital twin opcua
1.0.0
このリポジトリには、視覚コンポーネント4.0(VC 4.0)およびOPC UAを使用して、NTNUのロボットセル用のデジタルツイン(DTW)の開発で使用されるファイルが含まれています。
修士論文: http://hdl.handle.net/11250/2561319
グレード: a
システムには現在、次の機能が含まれています。
DTWの機能の一部を説明するために、カメラトラッキングで固定ケースが作成されました。
https://youtu.be/xlqhqpmjwla
改善の詳細については、プロジェクトレポートセクション5.1.2を参照してください。
http://hdl.handle.net/11250/2561319
このプロジェクトは、ノルウェー科学技術大学(NTNU)、生産技術局によって開始されました。プロジェクトの目的は次のとおりでした。
大規模なシステムの変更なしに、予期しないイベントや新しい要求に迅速に対応するために、将来の生産システムはより独立して作業できる必要があります。詳細なプログラミングや人間の相互作用なしで複雑なタスクを実行するインテリジェントマシンが必要です。自律システムは、独自の能力(「スキル」としてモデル化されている)と状態を知っています。彼らは、一連の可能なアクションを選択し、調整し、スキルを実行することができます。成功するには、自律システムには、生産プロセスの現在の状態と、通常はデジタルツインと呼ばれる外部環境との相互作用におけるシステム自身の動作の現実的なモデルが必要です。
OPC Unified Architecture(OPC UA)は、OPC Foundationが開発した産業自動化のためのマシン間通信のためのプラットフォームに依存しないプロトコルです。 OPCは、システムパフォーマンスが最小限に及ぶのと同時に、大量のリアルタイムデータへのアクセスに焦点を当てています。 OPC UAは、機械が「サービスとして生産」を提供する将来の産業環境で重要な基盤となる可能性があり、生産中のすべてのマシンとセンサーはオンライン(モノのインターネット)です。
このタスクでは、デジタルツインの実装が調査されます。システムの1つのデジタル表現にリンクされた、工業生産システムの一部となる可能性のあるロボット、PLS、およびその他の関連する制御システム間のシームレスな通信を提供するソリューションを開発する必要があります。システムは、研究所のロボット研究所でテストする必要があります。
a) OPC UAを使用してデジタルツインを実装する方法を説明してください。
b)視覚コンポーネント4.0または同様のシミュレーションソフトウェアを使用することの利点と短所を調べる
デジタルツインの場合。
c)視覚コンポーネント4.0または同様のシミュレーションソフトウェアを使用して、研究所のロボットセルをモデル化およびシミュレートします。
d) KukavarproxyとKuka RSI Ethernetをミドルウェアとして使用することの利点と短所を調べる
KUKA KR C4ロボットコントローラーとデジタルツインの間。
e)コミュニケーションにOPC UAを使用して、研究所のロボット研究所のデジタルツインのソリューションを提示します。
f)固定ケースでシステムを試してみてください。結果を評価します。
このプロジェクトでは、産業4.0(I 4.0)という用語と、この現代産業革命の資産としてのデジタルツインズ(DTW)の使用について調査します。 DTWは、この環境とのこのシステムの相互作用に関するデータを含む物理システムのデジタルレプリカとして説明できます。このプロジェクトの目標は、NTNUのMTP ValgrindaでロボットセルのDTWを開発し、このシステムでテクノロジーを導入し、自動ロボットシステムのドメインを一般的に導入することで得られる利点を調査することでした。
DTWは、OPC UA通信アーキテクチャを使用して開発されました。 OPC UAは、業界におけるコミュニケーションの標準化を目的としたコミュニケーションアーキテクチャであるため、I 4.0の先駆者と呼ばれています。 3つの異なる視覚化ソフトウェアソリューションが比較されました。視覚コンポーネント4.0(VC 4.0)が、ロボットセルの視覚表現を開発するための最強の候補であると結論付けられました。 VC 4.0とOPC UAを使用して、ロボットセルのDTWが作成されました。
このプロジェクトで行われた作業のほとんどは、OPC UAを使用して、物理ロボットセルをVC 4.0の仮想表現に接続できる通信モジュールの作成を中心に展開しました。この作業の結果は、ロボットセルの仮想表現と、DTWにさまざまな機能を提供できるさまざまな通信モジュールを含む通信ライブラリです。このライブラリはオープンソースにされており、プロジェクトのGitHubリポジトリにあります
https://github.com/akselov/digital-twin-opcua
このライブラリに含まれるソフトウェアにより、DTWは物理ロボットの動きのリアルタイムミラーリングを行い、ロボットセンサーデータのプロット、DTWのロボットを制御できます。機能を整理するためにグラフィカルユーザーインターフェイスが開発されました。図2は、DTWの現在の通信アーキテクチャを示しています。
DTWは固定ケースでテストされました。これは、動きのミラーリング、センサーデータのプロット、VC 4.0からの制御など、マルチロボットケースでした。オンラインで公開されているケースからビデオが作成されました
https://youtu.be/xlqhqpmjwla
OPC UAは、あらゆるプラットフォームで実装できるため、このDTWで使用するための優れたソリューションであり、クライアント/サーバーベースのシステムで使用される従来の通信ソフトウェアよりも柔軟で構造化された通信方法を可能にしていると結論付けられました。この自動ロボットシステムでDTWを使用することで見つかった利点には、操作への視界と、将来の状態を予測し、ロボットセルに関連する特徴的なパラメーターを最適化するための統計分析のより良い基盤が含まれていました。最後に、DTWは複雑なシステムを管理するための優れた基盤として機能すると結論付けられました。これは、この特定のシステムが研究所でのトレーニングと専門能力開発に使用されるため、有益なものです。
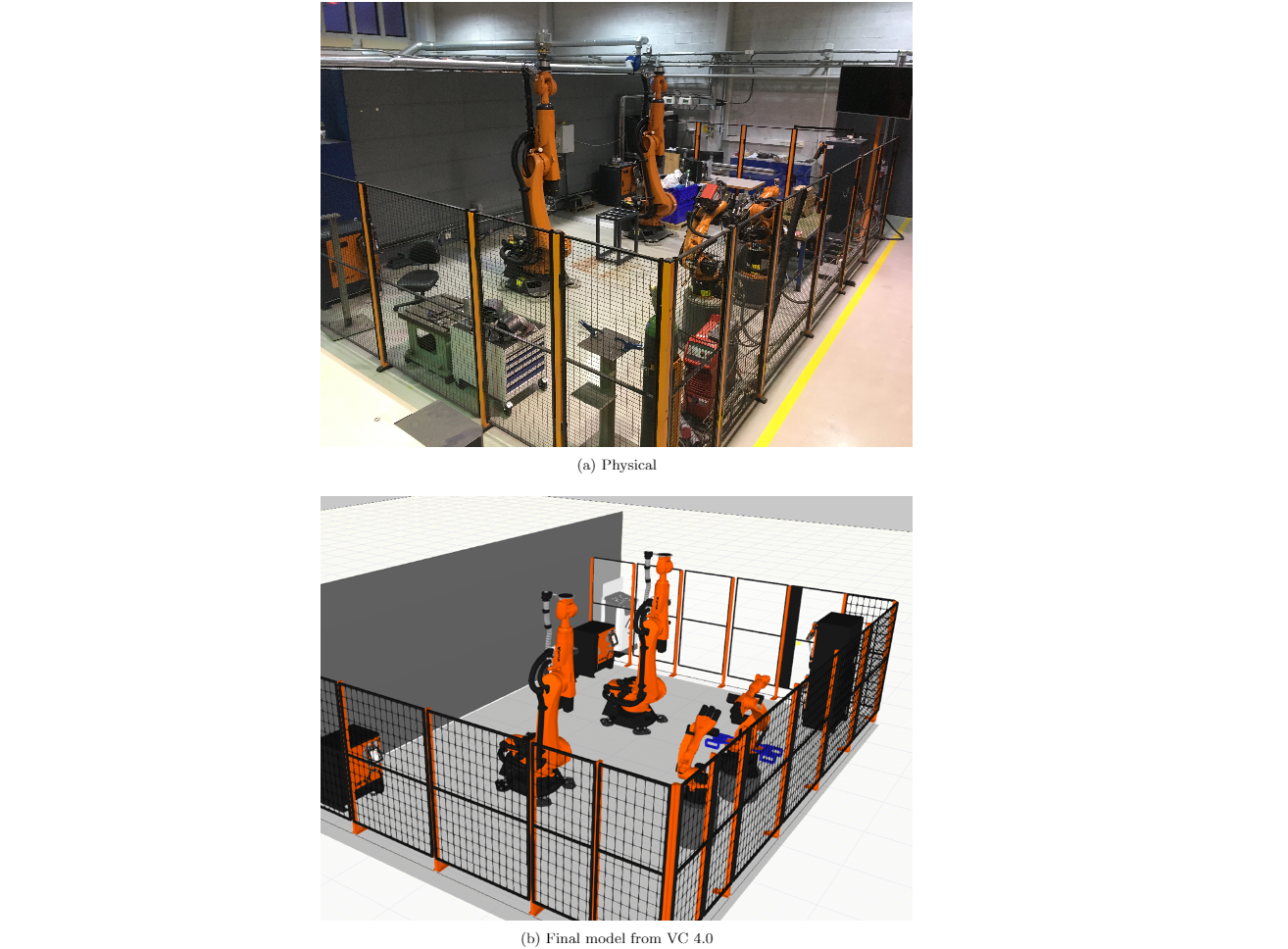
図1:ロボットセル、物理的およびデジタル
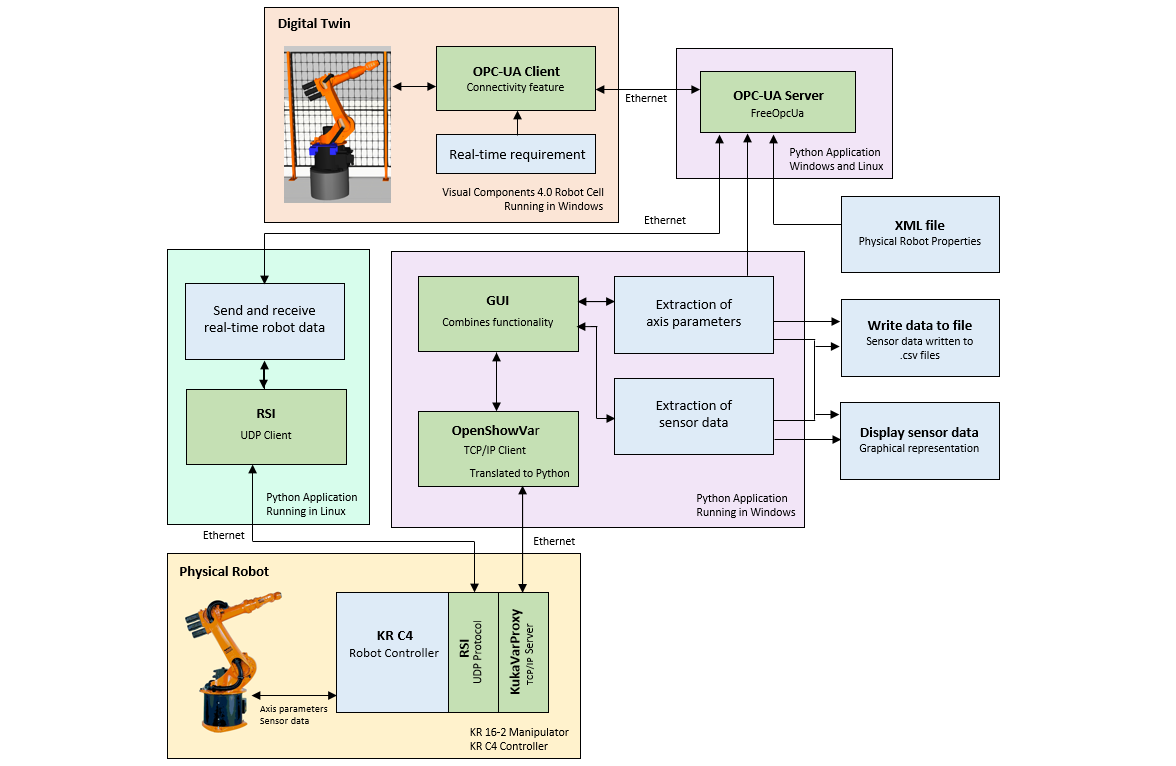 図2:現在の通信アーキテクチャ
図2:現在の通信アーキテクチャ
Visual Components 4.0 OPC UA接続を起動するGUI、ロボットセンサーデータを表示し、.CSVファイルにデータを書き込みます。
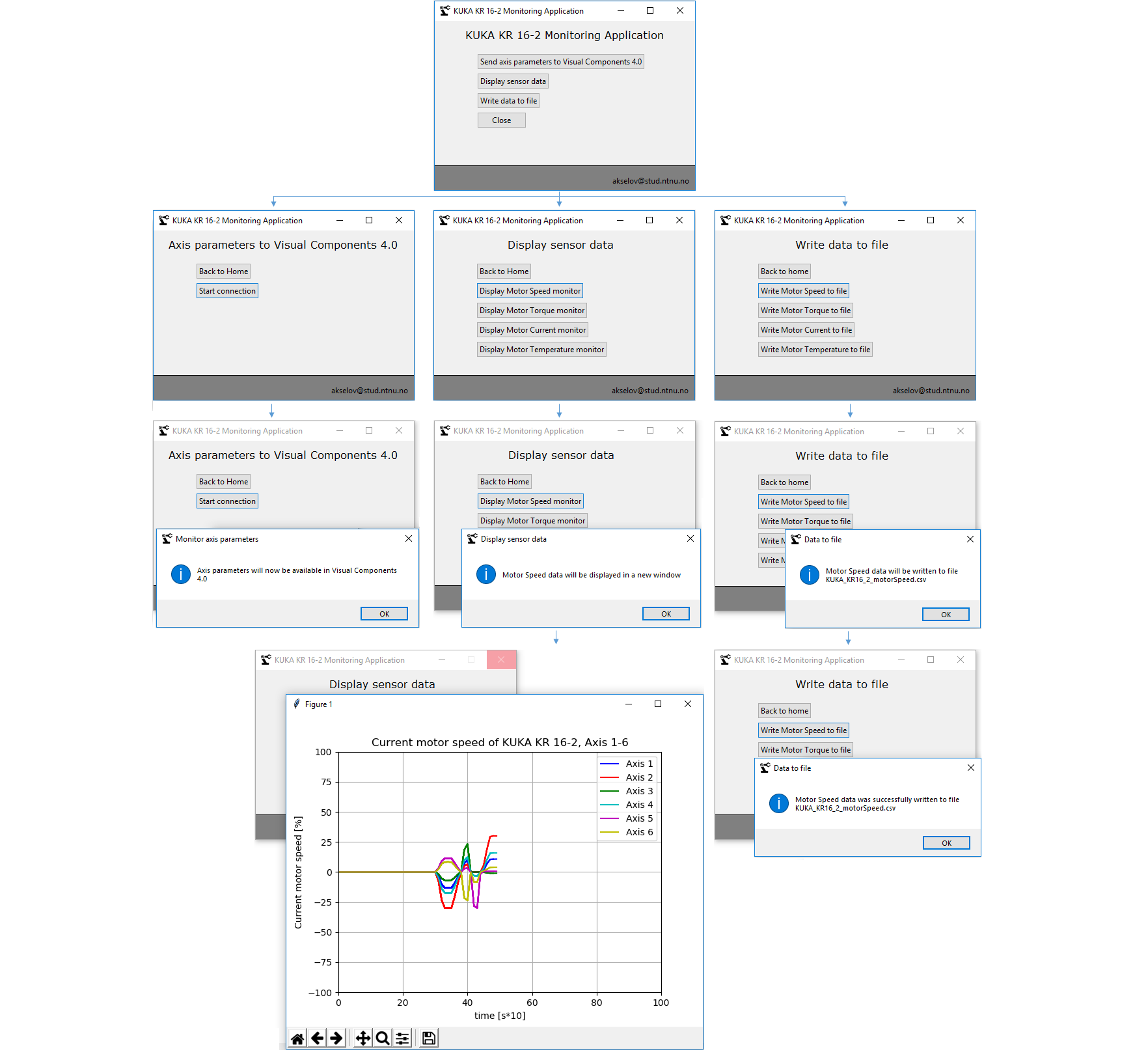 図3:GUI
図3:GUI
このライブラリには、VC 4.0のロボットセルの2つのファイルが含まれています。
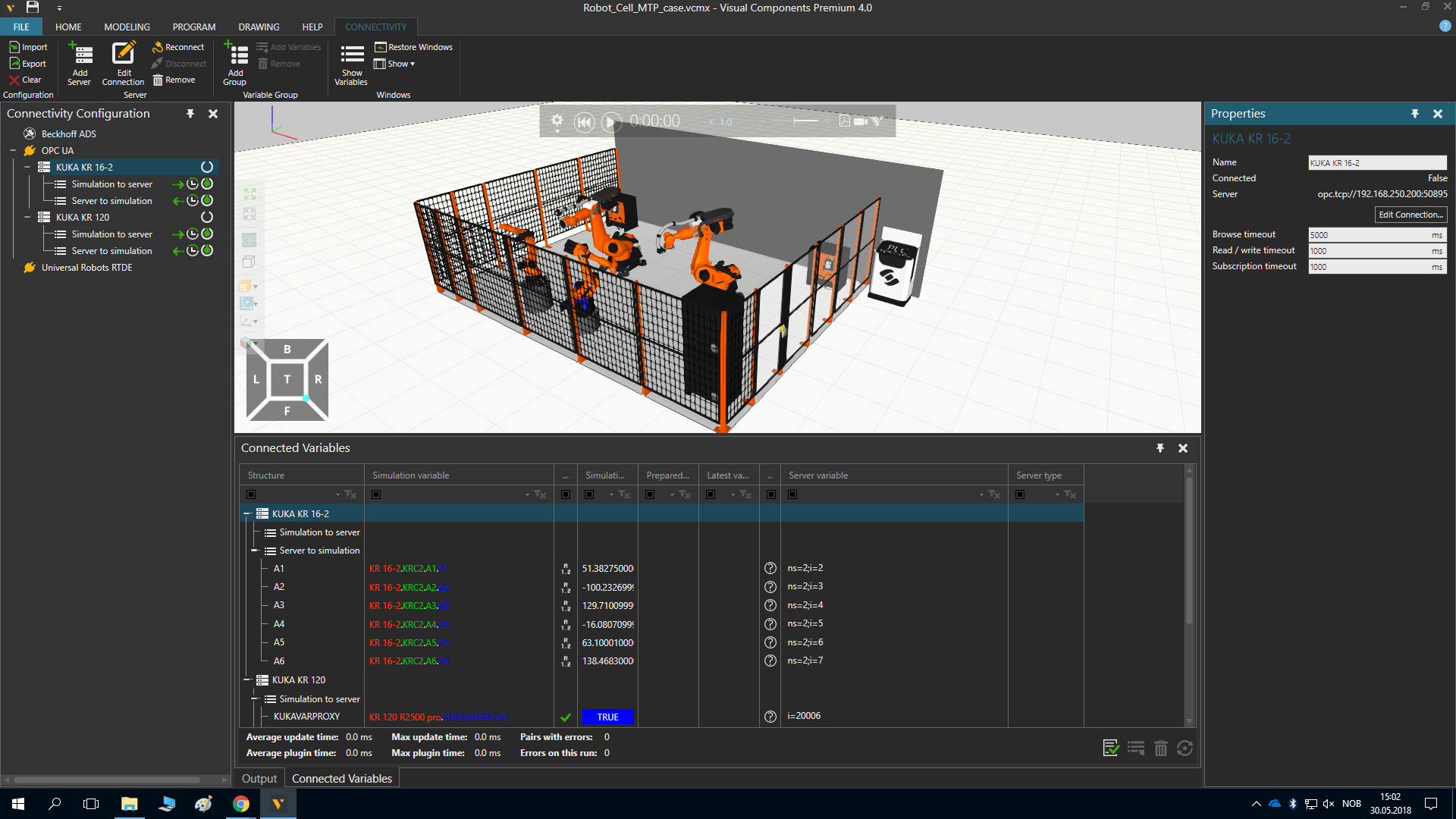 図4:VC 4.0のスクリーンショット
図4:VC 4.0のスクリーンショット
このプロジェクトで開発されたソフトウェアは、以下の作業に基づいています。


