digital twin opcua
1.0.0
يحتوي هذا المستودع على ملفات مستخدمة في تطوير توأم رقمي (DTW) لخلية روبوت في NTNU مع استخدام المكونات المرئية 4.0 (VC 4.0) و OPC UA.
أطروحة الماجستير: http://hdl.handle.net/11250/2561319
الصف: أ
يحتوي النظام حاليًا على الوظيفة التالية:
تم ذلك بحالة ثابتة مع تتبع الكاميرا لتوضيح بعض وظائف DTW:
https://youtu.be/xlqhqpmjwla
لمزيد من المعلومات حول التحسينات ، راجع قسم تقرير المشروع 5.1.2:
http://hdl.handle.net/11250/2561319
بدأ هذا المشروع من قبل الجامعة النرويجية للعلوم والتكنولوجيا (NTNU) ، قسم تكنولوجيا الإنتاج. كان الهدف من المشروع ما يلي:
من أجل الاستجابة بسرعة للأحداث غير المتوقعة والمطالب الجديدة دون تغييرات واسعة النطاق في النظام ، يجب أن تكون أنظمة الإنتاج المستقبلية قادرة على العمل بشكل أكثر استقلالية. هناك حاجة إلى آلات ذكية تؤدي مهام معقدة دون برمجة مفصلة وبدون تفاعل بشري. تعرف الأنظمة ذاتية الحكم قدراتها الخاصة (والتي تم تصميمها على أنها "مهارات") وحالتها. إنهم قادرون على الاختيار بين مجموعة من الإجراءات الممكنة ، وتنسيق وأداء مهاراتهم. لتحقيق النجاح ، تحتاج الأنظمة المستقلة إلى أن يكون لها نماذج واقعية للحالة الحالية لعملية الإنتاج وسلوك النظام الخاص بالتفاعل مع بيئته الخارجية - عادة ما يسمى التوأم الرقمي.
OPC Unified Architecture (OPC UA) هو بروتوكول مستقل للمنصة للتواصل من آلة إلى أخرى للأتمتة الصناعية التي طورتها مؤسسة OPC. يركز OPC على الوصول إلى كميات كبيرة من البيانات في الوقت الفعلي في نفس الوقت الذي يتأثر فيه أداء النظام إلى الحد الأدنى. لدى OPC UA القدرة على أن تصبح أساسًا مهمًا في البيئة الصناعية المستقبلية حيث تقدم الآلات "الإنتاج كخدمة" ، وجميع الآلات وأجهزة الاستشعار في الإنتاج هي عبر الإنترنت (إنترنت الأشياء).
في هذه المهمة ، سيتم دراسة تنفيذ التوأم الرقمي. يجب تطوير حل يوفر اتصالًا سلسًا بين الروبوتات ، PLSS ، وأنظمة التحكم الأخرى ذات الصلة التي يمكن أن تكون جزءًا من نظام الإنتاج الصناعي ، مرتبطًا بتمثيل رقمي واحد للنظام. يجب اختبار النظام في مختبر معهد روبوت.
أ) صف كيف يمكن تنفيذ التوأم الرقمي باستخدام OPC UA.
ب) فحص مزايا وعيوب استخدام المكونات المرئية 4.0 أو برنامج محاكاة مماثل
للتوأم الرقمي.
ج) استخدام المكونات المرئية 4.0 أو برنامج محاكاة مماثل لتصميم ومحاكاة خلية الروبوت في المعهد.
د) فحص مزايا وعيوب استخدام Kukavarproxy و Kuka RSI Ethernet كبرامج وسيطة
بين وحدات التحكم الروبوت Kuka KR C4 والتوأم الرقمي.
هـ) تقديم حل لتوأم رقمي لمختبر روبوت المعهد باستخدام OPC UA للتواصل.
و) جرب النظام في حالة ثابتة. تقييم النتائج.
يستكشف هذا المشروع مصطلح الصناعة 4.0 (I 4.0) واستخدام التوائم الرقمية (DTWS) كأصل في هذه الثورة الصناعية الحديثة. يمكن وصف DTW بأنها نسخة طبق الأصل الرقمية للنظام الفعلي بما في ذلك بيانات حول تفاعل هذه الأنظمة مع بيئتها. كان الهدف من هذا المشروع هو تطوير DTW لخلية روبوت في MTP Valgrinda ، NTNU ، والتحقيق في الفوائد التي يمكن الحصول عليها من إدخال التكنولوجيا في هذا النظام ومجال الأنظمة الآلية الآلية بشكل عام.
تم تطوير DTW باستخدام بنية اتصال OPC UA. يُطلق على OPC UA رائد I 4.0 لأنه بنية اتصال تهدف إلى توحيد التواصل في الصناعة. وتمت مقارنة ثلاثة حلول برامج التصور المختلفة. وخلص إلى أن المكونات المرئية 4.0 (VC 4.0) كانت أقوى مرشح لتطوير تمثيل بصري لخلية الروبوت. باستخدام VC 4.0 و OPC UA تم إنشاء DTW لخلية الروبوت.
تدور معظم الأعمال المنجزة في هذا المشروع حول إنشاء وحدات اتصال قادرة على توصيل خلية الروبوت المادية بالتمثيل الافتراضي في VC 4.0 ، من خلال استخدام OPC UA. نتيجة هذا العمل هي مكتبة اتصالات تحتوي على التمثيل الظاهري لخلية الروبوت ووحدات الاتصال المختلفة القادرة على إعطاء وظائف DTW المختلفة. هذه المكتبة مصنوعة مفتوحة المصدر ويمكن العثور عليها في مستودع GitHub للمشروع على
https://github.com/akselov/digital-twin-opcua
يمكّن البرنامج المدرج في هذه المكتبة DTW من القيام بالمراكز في الوقت الفعلي لحركات الروبوت المادي ، والتخطيط لبيانات المستشعر الآلي والتحكم في الروبوتات من DTW. تم تطوير واجهة مستخدم رسومية لتنظيم الوظائف. يوضح الشكل 2 بنية الاتصال الحالية لـ DTW.
تم اختبار DTW في حالة ثابتة. كانت هذه حالة متعددة الروبوتات بما في ذلك النسخ المتطابق للحركات ، والتخطيط لبيانات المستشعر والتحكم من VC 4.0. تم صنع مقطع فيديو من القضية التي يتم نشرها على الإنترنت على
https://youtu.be/xlqhqpmjwla
تم استنتاج أن OPC UA كان حلاً جيدًا للاستخدام في DTW هذا حيث يمكن تنفيذها على أي منصة ، وتمكّن طريقة أكثر مرونة ومنظمة للتواصل من برامج الاتصال التقليدية المستخدمة في الأنظمة القائمة على العميل/الخادم. تضمنت الفوائد التي تم العثور عليها مع استخدام DTW في هذا النظام الآلي الآلي رؤية للعمليات ومؤسسة أفضل للتحليل الإحصائي للتنبؤ بالحالات المستقبلية ولتحسين المعلمات المميزة المرتبطة بخلية الروبوت. أخيرًا ، تم استنتاج أن DTW يعمل كأساس جيد لإدارة نظام معقد ، وهو أمر يمكن أن يكون مفيدًا لأن هذا النظام المحدد يستخدم في التدريب والتطوير المهني في المعهد.
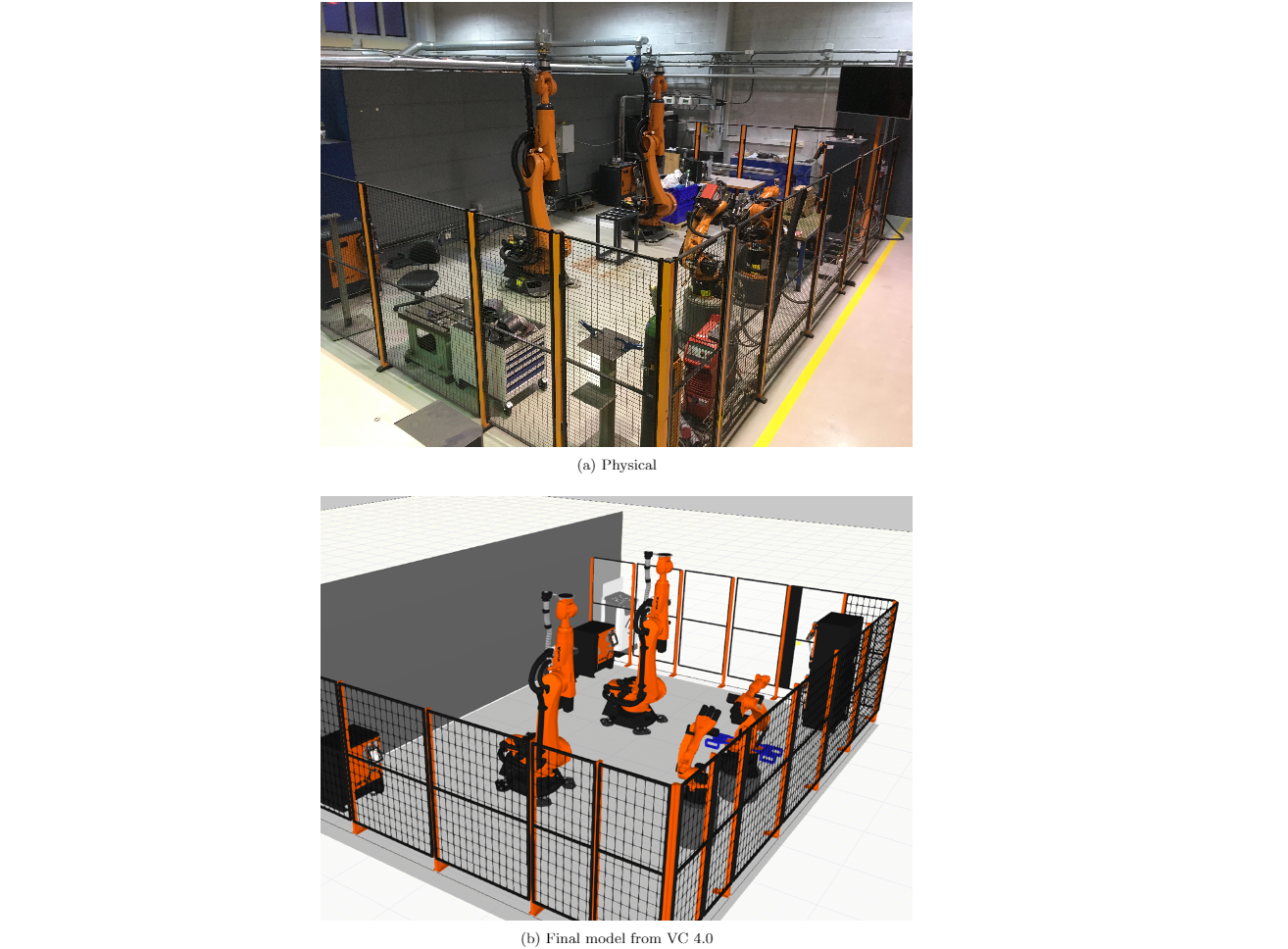
الشكل 1: خلايا الروبوت ، المادية والرقمية
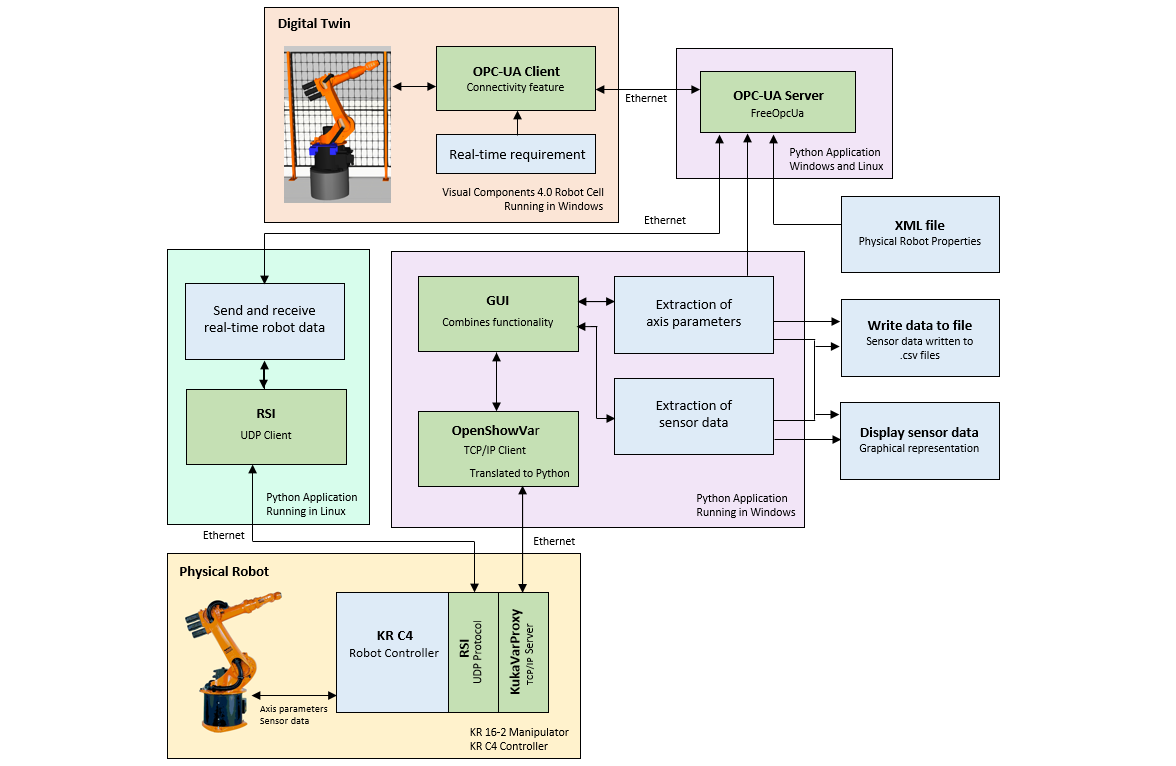 الشكل 2: بنية الاتصال الحالية
الشكل 2: بنية الاتصال الحالية
واجهة المستخدم الرسومية لإطلاق مكونات المرئية 4.0 اتصال OPC UA ، وعرض بيانات مستشعر الروبوت وكتابة البيانات إلى ملفات .csv.
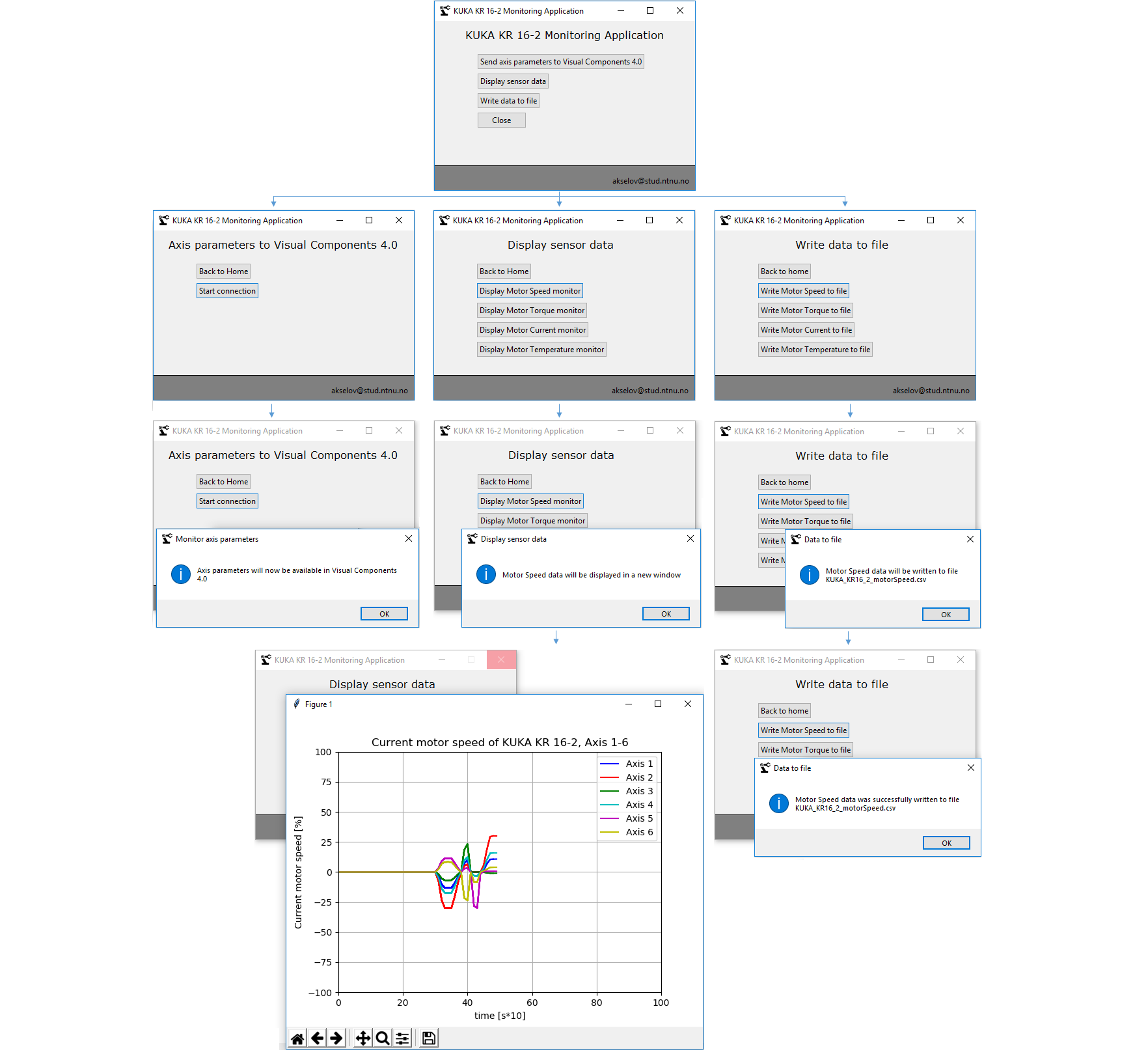 الشكل 3: واجهة المستخدم الرسومية
الشكل 3: واجهة المستخدم الرسومية
تحتوي هذه المكتبة على ملفين من خلية الروبوت من VC 4.0:
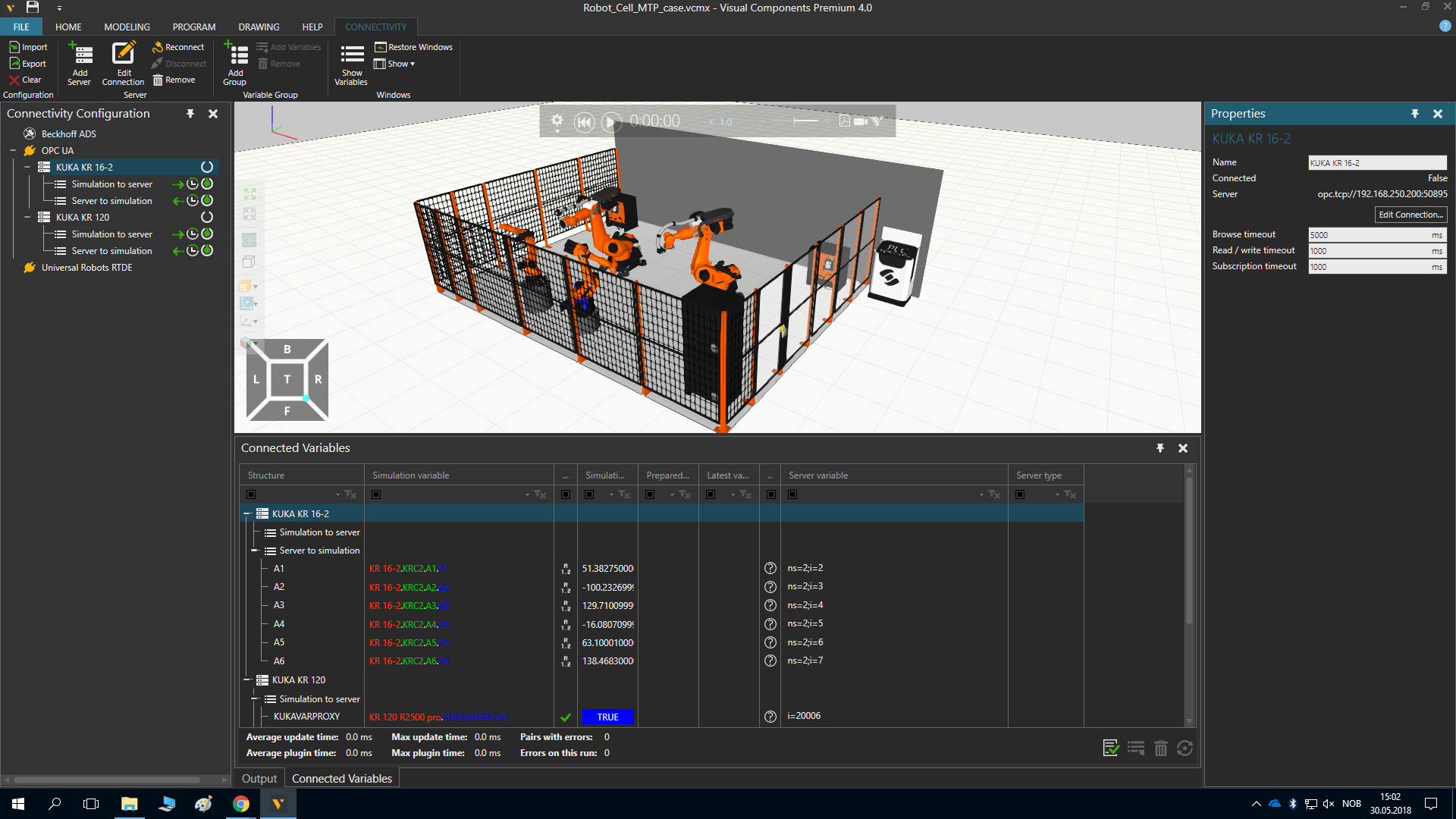 الشكل 4: لقطة شاشة من VC 4.0
الشكل 4: لقطة شاشة من VC 4.0
يعتمد البرنامج الذي تم تطويره في هذا المشروع على العمل بواسطة:


