digital twin opcua
1.0.0
该存储库包含用于使用Visual组件4.0(VC 4.0)和OPC UA的机器人单元格开发的文件。
硕士论文: http://hdl.handle.net/11250/2561319
等级:
该系统当前包含以下功能:
它是通过摄像机跟踪进行的固定外壳,以说明DTW的某些功能:
https://youtu.be/xlqhqpmjwla
有关改进的更多信息,请参见项目报告第5.1.2节:
http://hdl.handle.net/11250/2561319
该项目由生产技术系挪威科学技术大学(NTNU)发起。该项目的目的是:
为了快速响应意外事件和新的需求而没有广泛的系统变化,未来的生产系统必须能够更独立地工作。需要智能机器执行复杂的任务,而无需详细的编程且没有人类互动。自主系统知道自己的能力(以“技能”为模型)及其状态。他们能够在一组可能的动作,编排和执行技能之间进行选择。为了取得成功,自主系统需要对生产过程的当前状态以及与外部环境的互动中的自身行为进行现实模型 - 通常称为数字双胞胎。
OPC Unified Architecture(OPC UA)是由OPC基金会开发的工业自动化机器对机器通信的独立于平台的协议。 OPC专注于同时访问大量实时数据,因为系统性能受到最低影响。 OPC UA有可能成为未来工业环境中的重要基础,在该工业环境中,机器提供了“作为服务的生产”,并且生产中的所有机器和传感器都是在线的(物联网)。
在此任务中,将研究数字双胞胎的实现。必须开发一个解决方案,该解决方案可以在机器人,PLS和其他相关控制系统之间提供无缝的通信,这些控制系统可以成为工业生产系统的一部分,该系统与系统的一个数字表示相关。该系统必须在研究所机器人实验室进行测试。
a)描述如何使用OPC UA实现数字双胞胎。
b)检查使用视觉组件4.0或类似仿真软件的优点和缺点
对于数字双胞胎。
c)使用视觉组件4.0或类似的仿真软件来建模和模拟研究所的机器人单元。
d)检查使用kukavarproxy和kuka rsi以太网的优点和缺点
在Kuka KR C4机器人控制器和数字双胞胎之间。
e)通过使用OPC UA进行通信,为研究所机器人实验室的数字双胞胎提供了解决方案。
f)在固定情况下尝试系统。评估结果。
该项目探讨了“行业4.0(I 4.0)”一词,并在这场现代工业革命中使用数字双胞胎(DTW)作为资产。 DTW可以描述为物理系统的数字复制品,包括有关该系统与环境相互作用的数据。该项目的目的是为NTNU的MTP Valgrinda开发一个机器人单元的DTW,并研究通过在该系统中引入技术以及一般自动化机器人系统的域而获得什么好处。
DTW是使用OPC UA通信体系结构开发的。 OPC UA被称为I 4.0的先驱,因为它是旨在行业沟通标准化的通信体系结构。比较了三种不同的可视化软件解决方案。得出的结论是,视觉组件4.0(VC 4.0)是开发机器人细胞视觉表示的最强候选者。创建了使用VC 4.0和OPC UA A DTW的DTW。
该项目中完成的大多数工作都是围绕创建能够通过使用OPC UA将物理机器人单元连接到VC 4.0中虚拟表示的通信模块的。这项工作的结果是一个通信库,其中包含机器人单元的虚拟表示以及能够提供DTW各种功能的不同通信模块。该库是开源的,可以在项目的GitHub存储库中找到
https://github.com/akselov/digital-twin-opcua
此库中包含的软件使DTW能够对物理机器人的运动进行实时镜像,绘制机器人传感器数据并从DTW中控制机器人。开发了图形用户界面来组织功能。图2说明了DTW的当前通信体系结构。
在固定情况下对DTW进行了测试。这是一个多机器人案例,包括移动的镜像,绘制传感器数据和VC 4.0的控制。它是由案件的视频制作的,该视频已在线发布
https://youtu.be/xlqhqpmjwla
得出的结论是,OPC UA是在此DTW中使用的一个很好的解决方案,因为可以在任何平台上实现,并且比基于客户端/服务器的系统中使用的传统通信软件更灵活,更结构化的通信方式。在此自动化机器人系统中使用DTW所发现的好处包括对操作的可见性以及更好的统计分析基础,以预测未来状态并优化与机器人单元相关的特征参数。最后,得出结论,DTW是管理复杂系统的良好基础,这可能是有益的,因为该特定系统用于研究所的培训和专业发展。
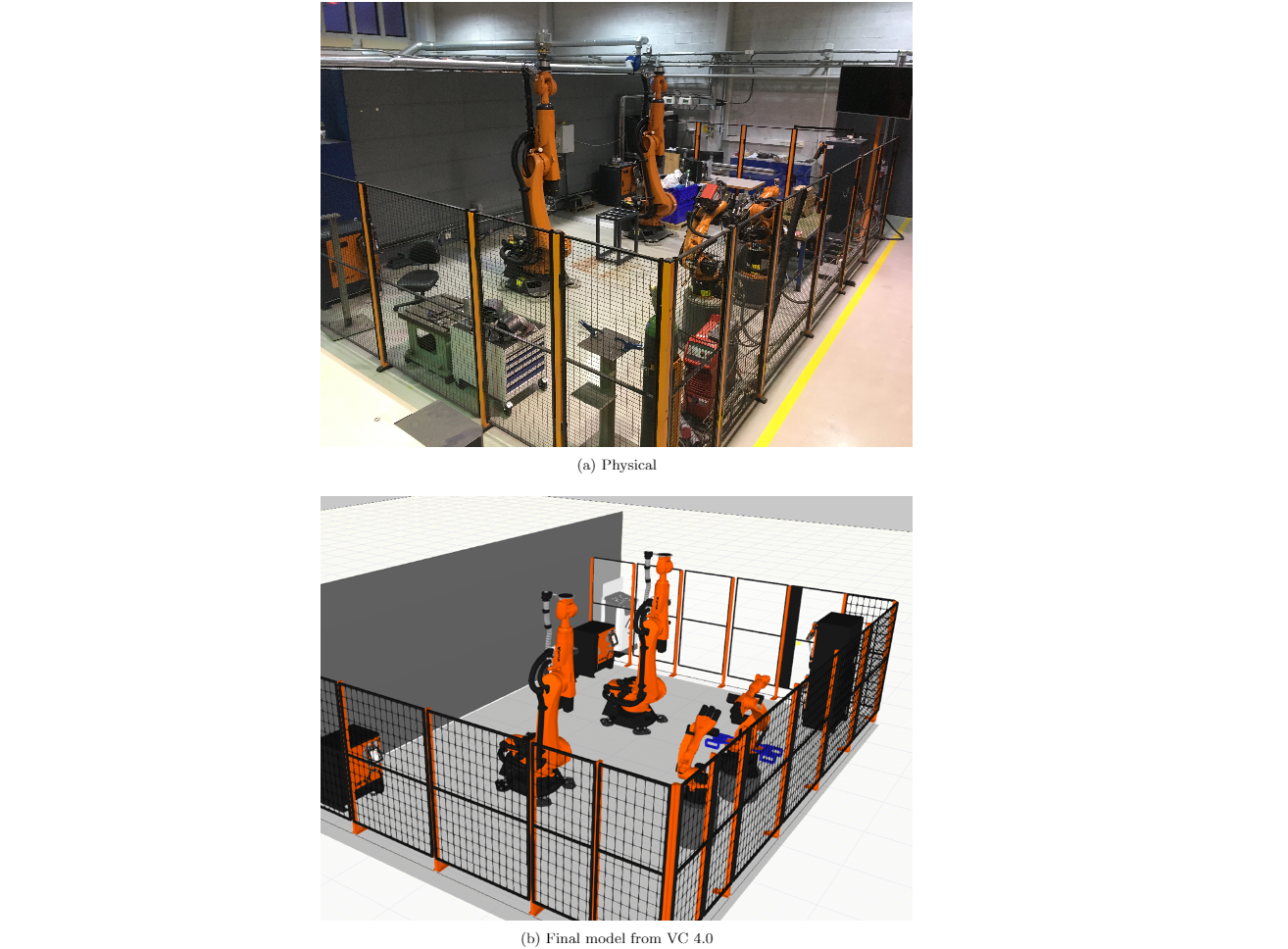
图1:机器人单元,物理和数字
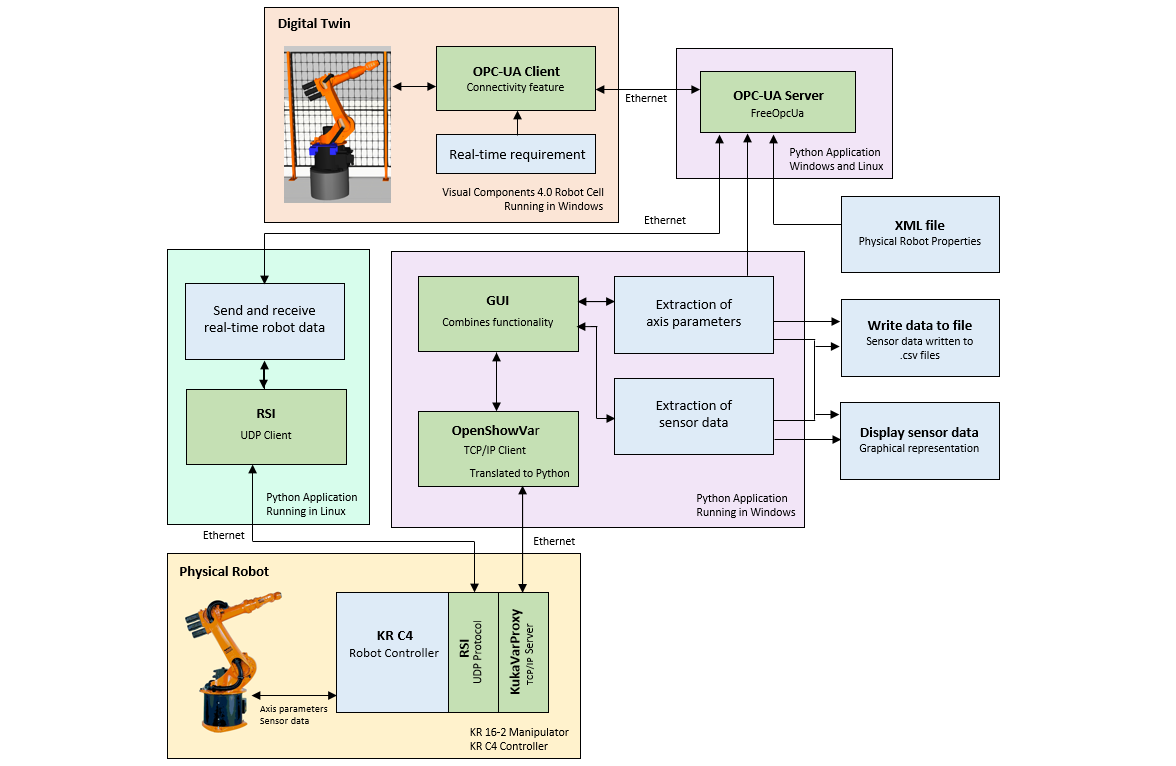 图2:当前的通信体系结构
图2:当前的通信体系结构
GUI用于启动Visual组件4.0 OPC UA连接,显示机器人传感器数据并将数据写入.CSV文件。
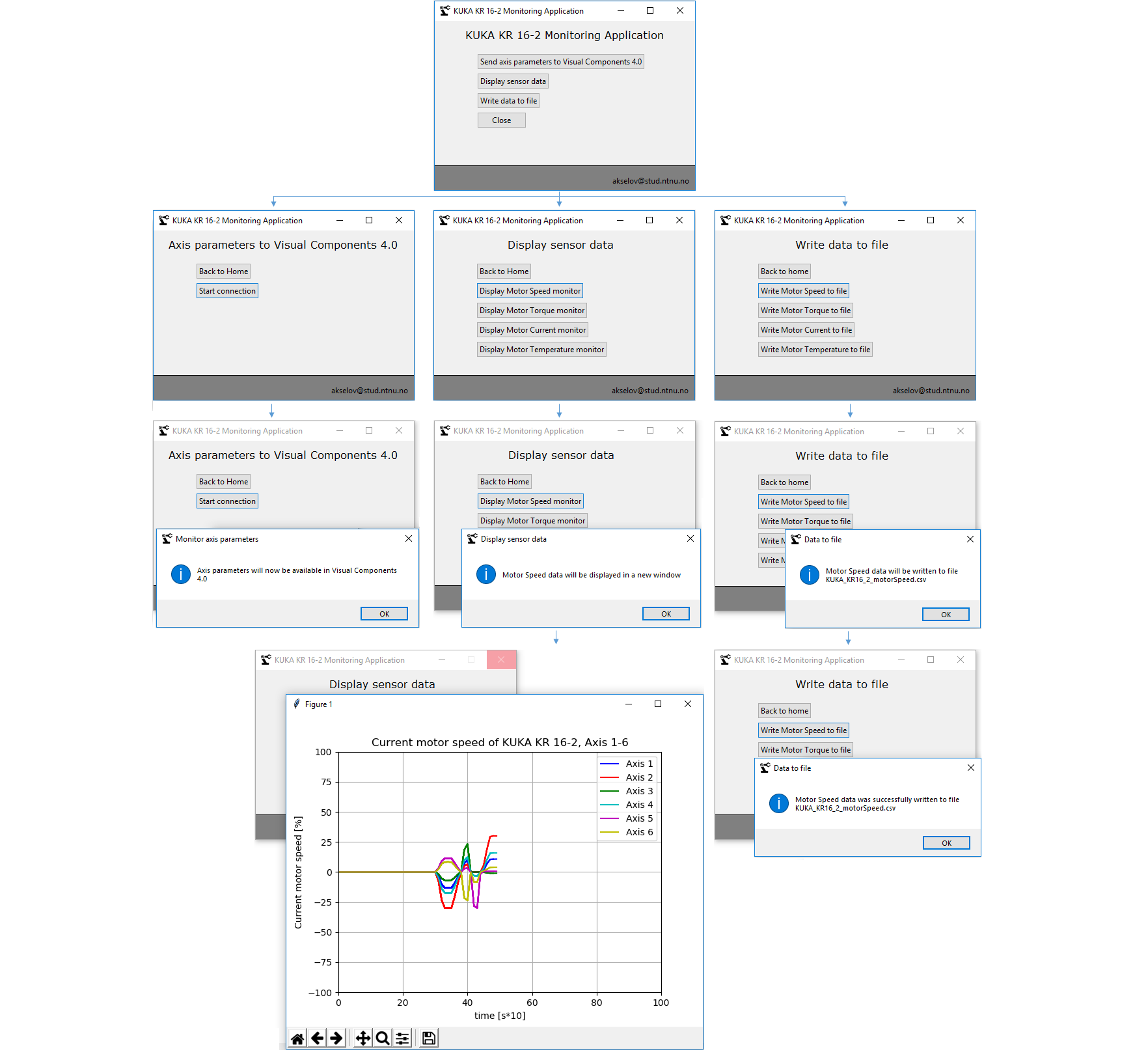 图3:GUI
图3:GUI
该库包含VC 4.0的机器人单元的两个文件:
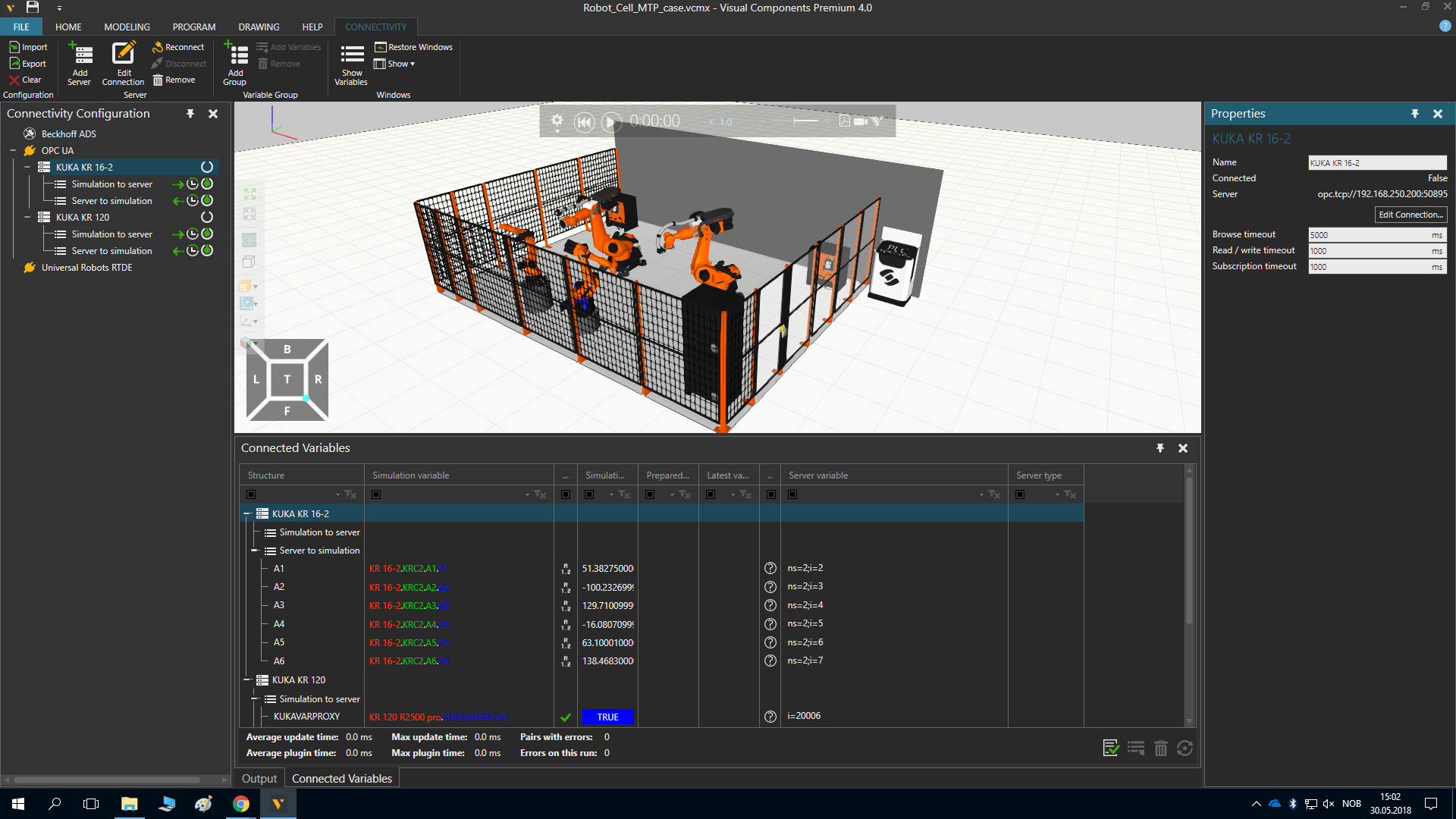 图4:VC 4.0的屏幕截图
图4:VC 4.0的屏幕截图
该项目中开发的软件基于工作:


