digital twin opcua
1.0.0
Este repositório contém arquivos usados no desenvolvimento de um gêmeo digital (DTW) para uma célula de robô na NTNU com o uso de componentes visuais 4.0 (VC 4.0) e OPC UA.
Tese de mestrado: http://hdl.handle.net/11250/2561319
Grau: a
O sistema atualmente contém a seguinte funcionalidade:
Foi feito um estojo fixo com rastreamento de câmera para ilustrar algumas das funcionalidades do DTW:
https://youtu.be/xlqhqpmjwla
Para obter mais informações sobre melhorias, consulte o relatório do projeto Seção 5.1.2:
http://hdl.handle.net/11250/2561319
Este projeto foi iniciado pela Universidade Norueguesa de Ciência e Tecnologia (NTNU), Departamento de Tecnologia do Departamento de Produção. O objetivo do projeto foi o seguinte:
Para responder rapidamente a eventos inesperados e novas demandas sem extensas mudanças no sistema, os sistemas futuros de produção devem poder trabalhar de forma mais independente. Há uma necessidade de máquinas inteligentes que executam tarefas complexas sem programação detalhada e sem interação humana. Os sistemas autônomos conhecem suas próprias habilidades (que são modeladas como "habilidades") e seu estado. Eles são capazes de escolher entre um conjunto de ações possíveis, orquestrando e executar suas habilidades. Para ter sucesso, os sistemas autônomos precisam ter modelos realistas do estado atual do processo de produção e do próprio comportamento do sistema em interação com seu ambiente externo - geralmente chamado de gêmeo digital.
A OPC Unified Architecture (OPC UA) é um protocolo independente da plataforma para comunicação de máquina a máquina para automação industrial desenvolvida pela Fundação OPC. O OPC se concentra em acessar grandes quantidades de dados em tempo real ao mesmo tempo em que o desempenho do sistema é afetado no mínimo. O OPC UA tem o potencial de se tornar uma base importante no futuro ambiente industrial, onde as máquinas oferecem "produção como serviço", e todas as máquinas e sensores na produção estão online (Internet das Coisas).
Nesta tarefa, a implementação de um gêmeo digital será estudada. Deve ser desenvolvido uma solução que forneça comunicação perfeita entre robôs, PLSS e outros sistemas de controle relevantes que podem fazer parte de um sistema de produção industrial, ligado a uma representação digital do sistema. O sistema deve ser testado no Laboratório do Robô do Instituto.
a) Descreva como um gêmeo digital pode ser implementado usando o OPC UA.
b) Examine as vantagens e desvantagens do uso de componentes visuais 4.0 ou software de simulação similar
para o gêmeo digital.
c) Use componentes visuais 4.0 ou software de simulação similar para modelar e simular a célula robô no instituto.
d) Examine as vantagens e desvantagens do uso de Kukavarproxy e Kuka RSI Ethernet como middleware
entre os controladores de robô Kuka KR C4 e o gêmeo digital.
e) Apresente uma solução para um gêmeo digital do laboratório de robôs do Instituto com o uso do OPC UA para comunicação.
f) Experimente o sistema em um caso fixo. Avalie os resultados.
Este projeto explora o termo indústria 4.0 (i 4.0) e o uso de gêmeos digitais (DTWs) como um ativo nessa moderna revolução industrial. Um DTW pode ser descrito como uma réplica digital de um sistema físico, incluindo dados sobre essa interação de sistemas com seu ambiente. O objetivo deste projeto foi desenvolver um DTW para uma célula de robôs no MTP Valgrinda, NTNU e investigar quais benefícios poderiam ser obtidos ao introduzir a tecnologia nesse sistema e o domínio dos sistemas robóticos automatizados em geral.
O DTW foi desenvolvido usando a arquitetura de comunicação OPC UA. O OPC UA é chamado de pioneiro do I 4.0, pois é uma arquitetura de comunicação com o objetivo da padronização da comunicação na indústria. Três soluções diferentes de software de visualização foram comparadas. Concluiu -se que os componentes visuais 4.0 (VC 4.0) eram o candidato mais forte para o desenvolvimento de uma representação visual da célula do robô. Usando o VC 4.0 e o OPC UA, foi criado um DTW da célula robô.
A maior parte do trabalho realizado neste projeto girou em torno da criação de módulos de comunicação capazes de conectar a célula robô física à representação virtual no VC 4.0, através do uso do OPC UA. O resultado deste trabalho é uma biblioteca de comunicação que contém a representação virtual da célula do robô e os diferentes módulos de comunicação capazes de fornecer ao DTW várias funcionalidades. Esta biblioteca é feita de código aberto e pode ser encontrado no repositório do GitHub do projeto em
https://github.com/akselov/digital-twin-opcua
O software incluído nesta biblioteca permite que o DTW refira o espelhamento em tempo real dos movimentos do robô físico, traçando dados de sensores robóticos e controlando os robôs do DTW. Uma interface gráfica do usuário foi desenvolvida para organizar as funcionalidades. A Figura 2 ilustra a arquitetura de comunicação atual para o DTW.
O DTW foi testado em um caso fixo. Este foi um caso de vários robôs, incluindo espelhamento de movimentos, plotagem dos dados do sensor e controle do VC 4.0. Foi feito um vídeo do caso que é publicado online em
https://youtu.be/xlqhqpmjwla
Concluiu -se que o OPC UA era uma boa solução para uso neste DTW, pois é possível implementar em qualquer plataforma e está permitindo uma maneira mais flexível e estruturada de comunicação do que o software de comunicação tradicional usado em sistemas baseados em clientes/servidores. Os benefícios encontrados com o uso do DTW neste sistema robótico automatizado incluíram visibilidade às operações e uma base melhor para a análise estatística para prever estados futuros e para otimizar parâmetros característicos associados à célula do robô. Finalmente, concluiu -se que o DTW atua como uma boa base para gerenciar um sistema complexo, algo que poderia ser benéfico, pois esse sistema específico é usado no treinamento e desenvolvimento profissional no instituto.
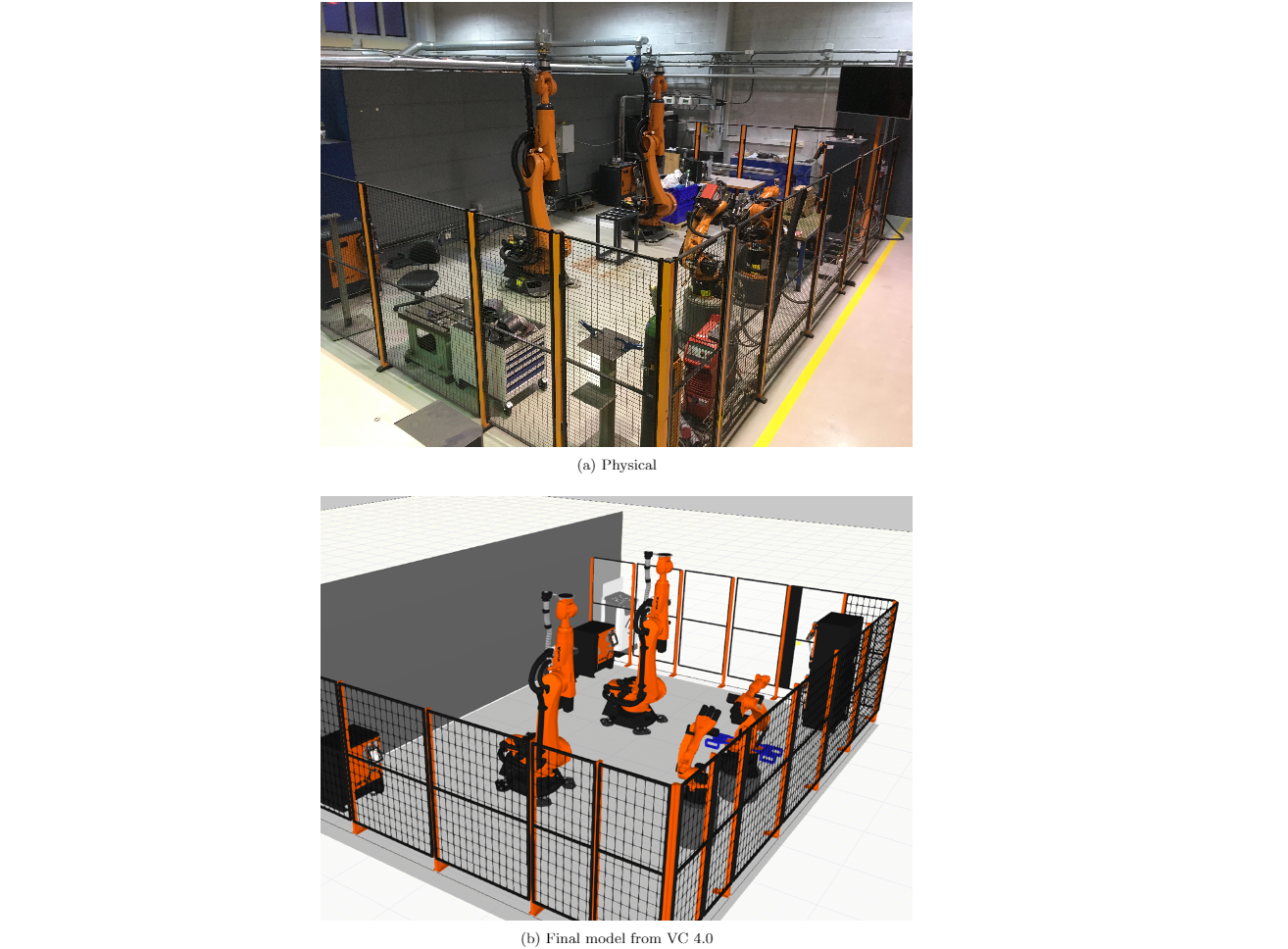
Figura 1: célula de robô, física e digital
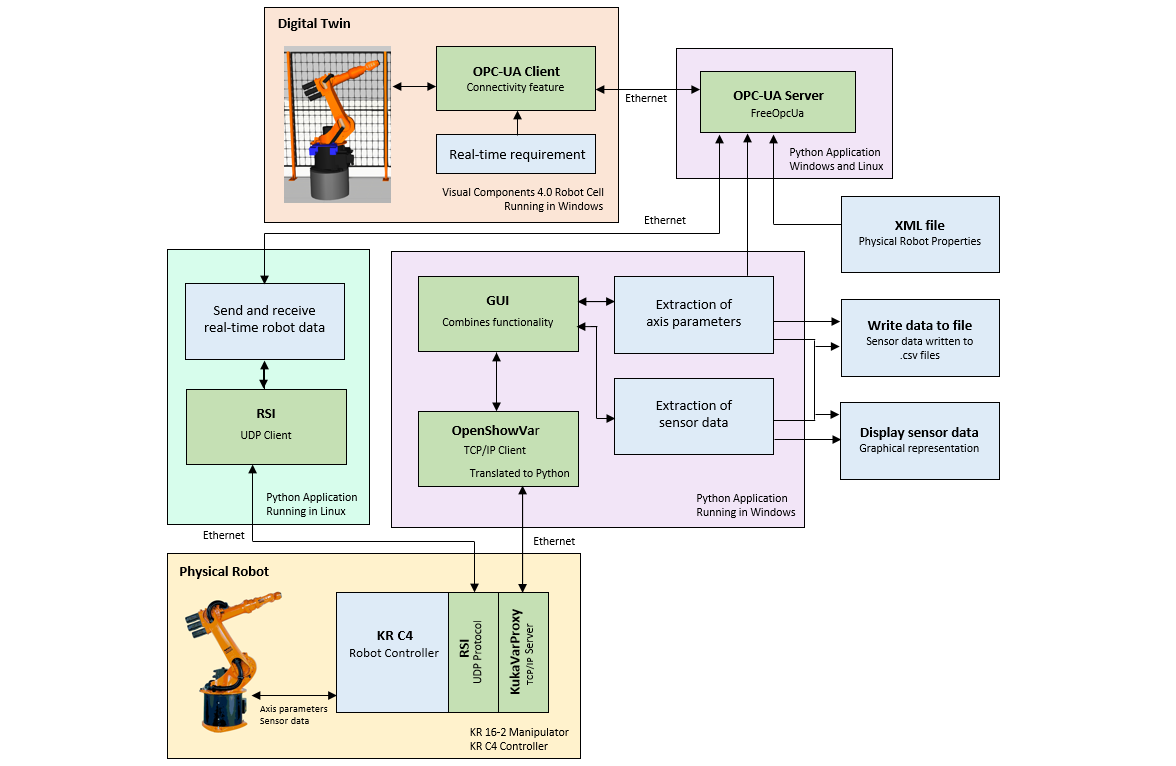 Figura 2: Arquitetura de comunicação atual
Figura 2: Arquitetura de comunicação atual
GUI para lançar a conexão Visual Components 4.0 OPC UA, exibir dados do sensor de robô e escrever dados para arquivos .csv.
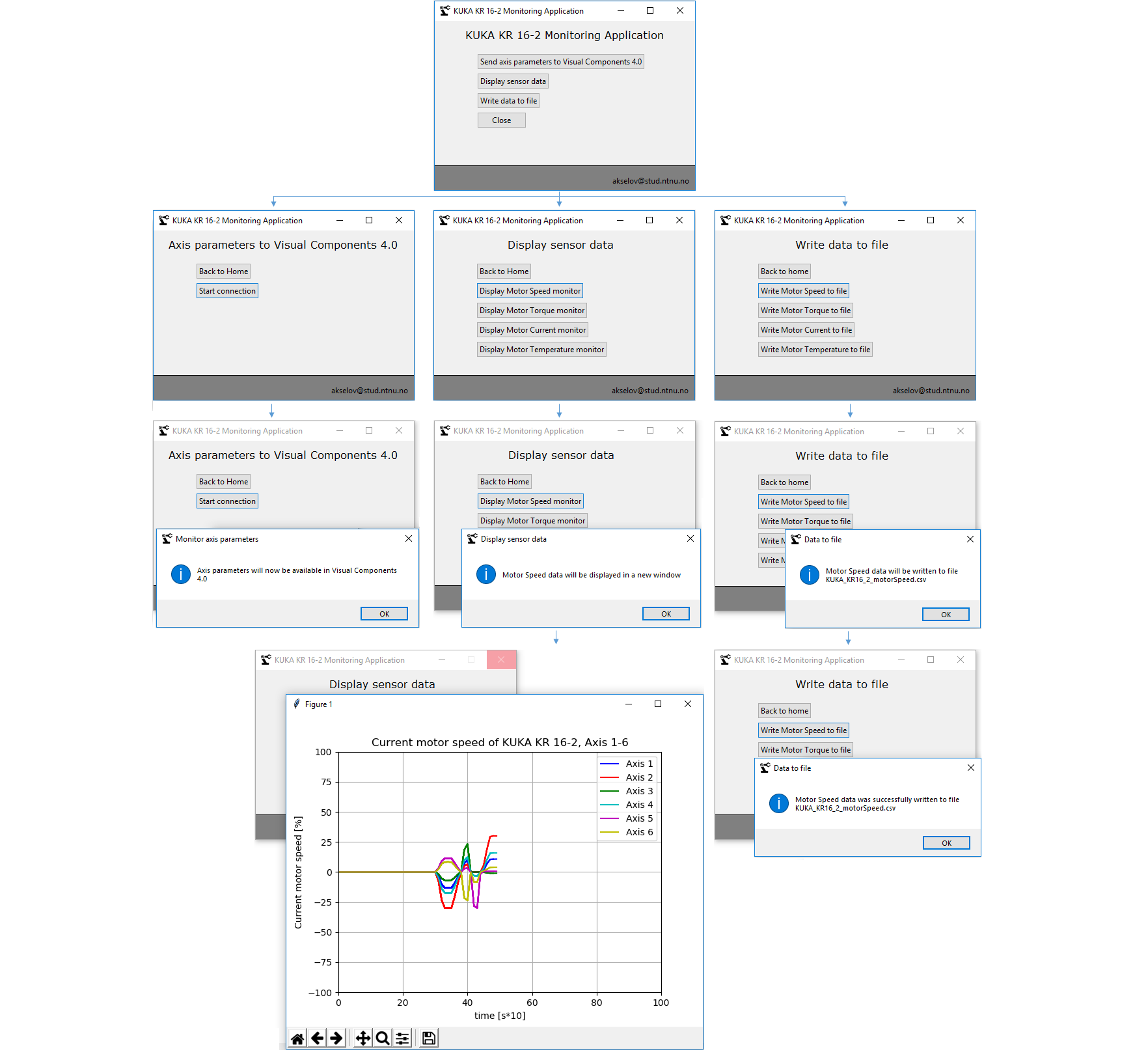 Figura 3: GUI
Figura 3: GUI
Esta biblioteca contém dois arquivos da célula robô do VC 4.0:
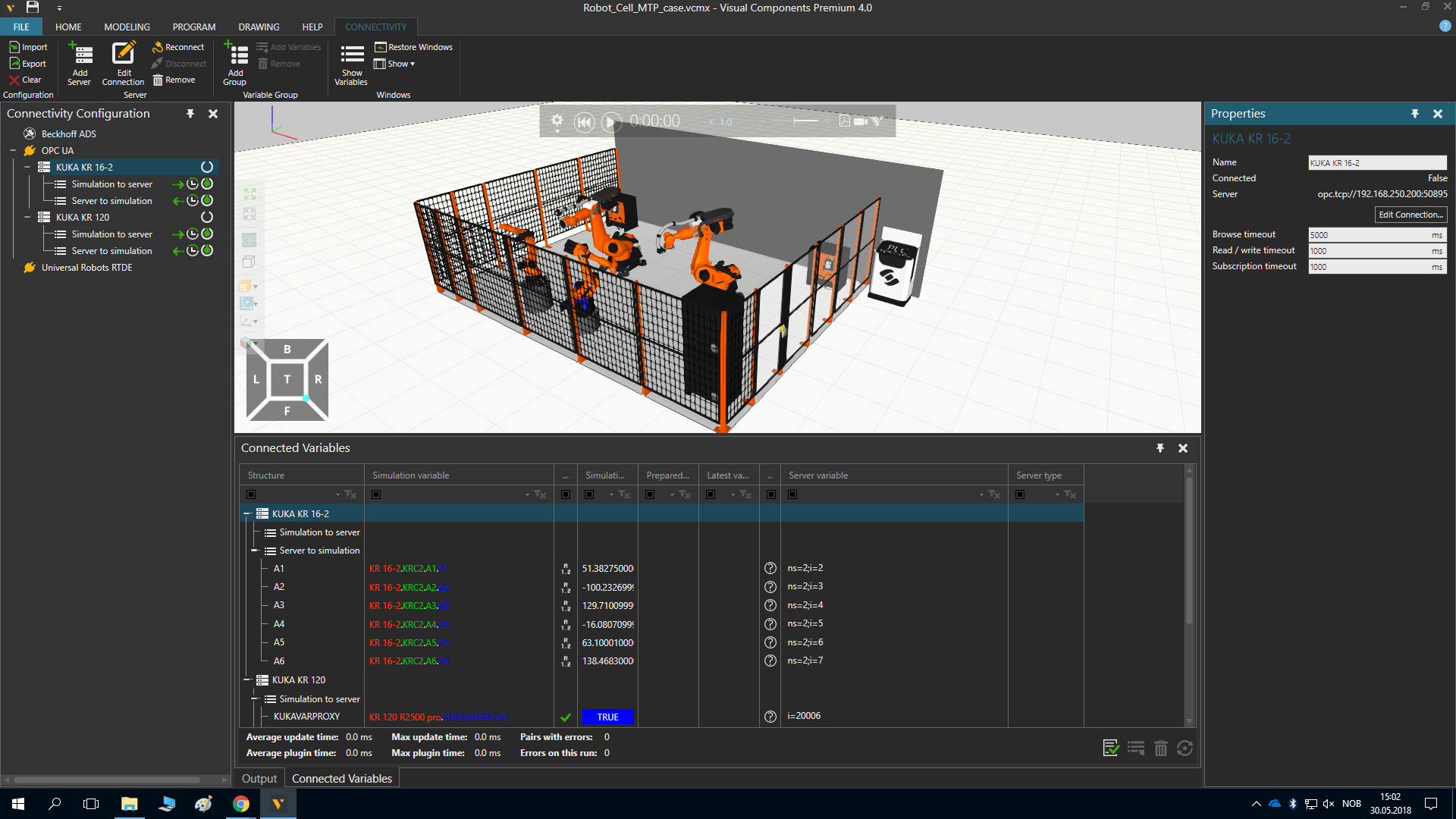 Figura 4: Captura de tela do VC 4.0
Figura 4: Captura de tela do VC 4.0
O software desenvolvido neste projeto é baseado no trabalho por:


