digital twin opcua
1.0.0
Этот репозиторий содержит файлы, используемые при разработке цифрового близнеца (DTW) для робот -ячейки в NTNU с использованием визуальных компонентов 4.0 (VC 4.0) и OPC UA.
Мастерская диссертация: http://hdl.handle.net/11250/2561319
Оценка: а
Система в настоящее время содержит следующую функциональность:
Это было сделано в фиксированном случае с отслеживанием камеры, чтобы проиллюстрировать некоторые функции DTW:
https://youtu.be/xlqhqpmjwla
Для получения дополнительной информации об улучшениях см. В разделе отчета о проекте 5.1.2:
http://hdl.handle.net/11250/2561319
Этот проект был инициирован Норвежским университетом науки и техники (NTNU), Департаментом производственных технологий. Целью проекта была следующая:
Чтобы быстро реагировать на неожиданные события и новые требования без обширных системных изменений, будущие производственные системы должны иметь возможность работать более независимо. Существует необходимость в интеллектуальных машинах, которые выполняют сложные задачи без детального программирования и без взаимодействия человека. Автономные системы знают свои собственные способности (которые смоделированы как «навыки») и их состояние. Они могут выбирать между набором возможных действий, оркестровав и выполнять свои навыки. Чтобы добиться успеха, автономные системы должны иметь реалистичные модели текущего состояния производственного процесса и собственное поведение системы во взаимодействии с ее внешней средой - обычно называемой цифровым близнецом.
OPC Unified Architecture (OPC UA)-это независимый от платформы протокол для машины-машины для промышленной автоматизации, разработанной Фондом OPC. OPC фокусируется на доступе к большим объемам данных в реальном времени в то же время, когда производительность системы влияет на минимум. OPC UA может стать важной основой в будущей промышленной среде, где машины предоставляют «производство в качестве услуги», и все машины и датчики в производстве находятся в Интернете (Интернет вещей).
В этой задаче будет изучена реализация цифрового близнеца. Необходимо разработать решение, которое обеспечивает бесшовную связь между роботами, PLSS и другими соответствующими системами управления, которые могут быть частью системы промышленного производства, связанной с одним цифровым представлением системы. Система должна быть проверена в Лаборатории робота Института.
а) Опишите, как цифровой близнец может быть реализован с использованием OPC UA.
б) Изучите преимущества и недостатки использования визуальных компонентов 4.0 или аналогичного программного обеспечения для моделирования
для цифрового близнеца.
C) Используйте визуальные компоненты 4.0 или аналогичное программное обеспечение для моделирования для моделирования и моделирования робот -ячейки в Институте.
D) Изучите преимущества и недостатки использования Kukavarproxy и Kuka RSI Ethernet в качестве промежуточного программного обеспечения
Между контроллерами роботов Kuka KR C4 и цифровым близнецом.
e) Представьте решение для цифрового близнеца лаборатории робота Института с использованием OPC UA для общения.
f) Попробуйте систему в фиксированном случае. Оценить результаты.
Этот проект исследует термин «Индустрия 4.0» (I 4.0) и использование цифровых близнецов (DTWS) в качестве актива в этой современной промышленной революции. DTW может быть описан как цифровая копия физической системы, включая данные об этом системном взаимодействии с ее средой. Цель этого проекта состояла в том, чтобы разработать DTW для робот -ячейки в MTP Valgrinda, NTNU, и изучение того, какие преимущества можно получить от введения технологии в этой системе и домены автоматизированных роботизированных систем в целом.
DTW был разработан с использованием архитектуры Communication OPC UA. OPC UA называется пионером I 4.0, поскольку это коммуникационная архитектура, направленная на стандартизацию коммуникации в промышленности. Три различных программных решения для визуализации были сопоставлены. Был сделан вывод, что визуальные компоненты 4.0 (VC 4.0) были самым сильным кандидатом для разработки визуального представления робот -клетки. Использование VC 4.0 и OPC UA была создана DTW робот -ячейки.
Большая часть работы, проделанной в этом проекте, вращалась вокруг создания модулей связи, способных подключить физическую робот -ячейку к виртуальному представлению в VC 4.0 с помощью OPC UA. Результатом этой работы является библиотека связи, содержащая виртуальное представление робот -ячейки и различные модули связи, способные предоставить DTW различные функции. Эта библиотека сделана с открытым исходным кодом и может быть найдена в репозитории Github в проекте в
https://github.com/akselov/digital-twin-opcua
Программное обеспечение, включенное в эту библиотеку, позволяет DTW делать зеркалирование движений физического робота, построение данных роботизированных датчиков и управление роботами из DTW. Графический пользовательский интерфейс был разработан для организации функций. Рисунок 2 иллюстрирует текущую архитектуру связи для DTW.
DTW был протестирован в фиксированном случае. Это был мульти-робот, включая зеркалирование движений, построение данных датчиков и управление VC 4.0. Это было сделано видео из случая, который опубликован в Интернете в
https://youtu.be/xlqhqpmjwla
Был сделан вывод, что OPC UA был хорошим решением для использования в этом DTW, поскольку его можно реализовать на любой платформе, и обеспечивает более гибкий и структурированный способ связи, чем традиционное программное обеспечение для коммуникации, используемое в системах на основе клиента/сервера. Преимущества, найденные с использованием DTW в этой автоматизированной роботизированной системе, включали видимость операций и лучшую основу для статистического анализа для прогнозирования будущих состояний и для оптимизации характерных параметров, связанных с робот -ячейкой. Наконец, был сделан вывод, что DTW действует как хорошая основа для управления сложной системой, что может быть полезным, поскольку эта конкретная система используется для обучения и профессионального развития в институте.
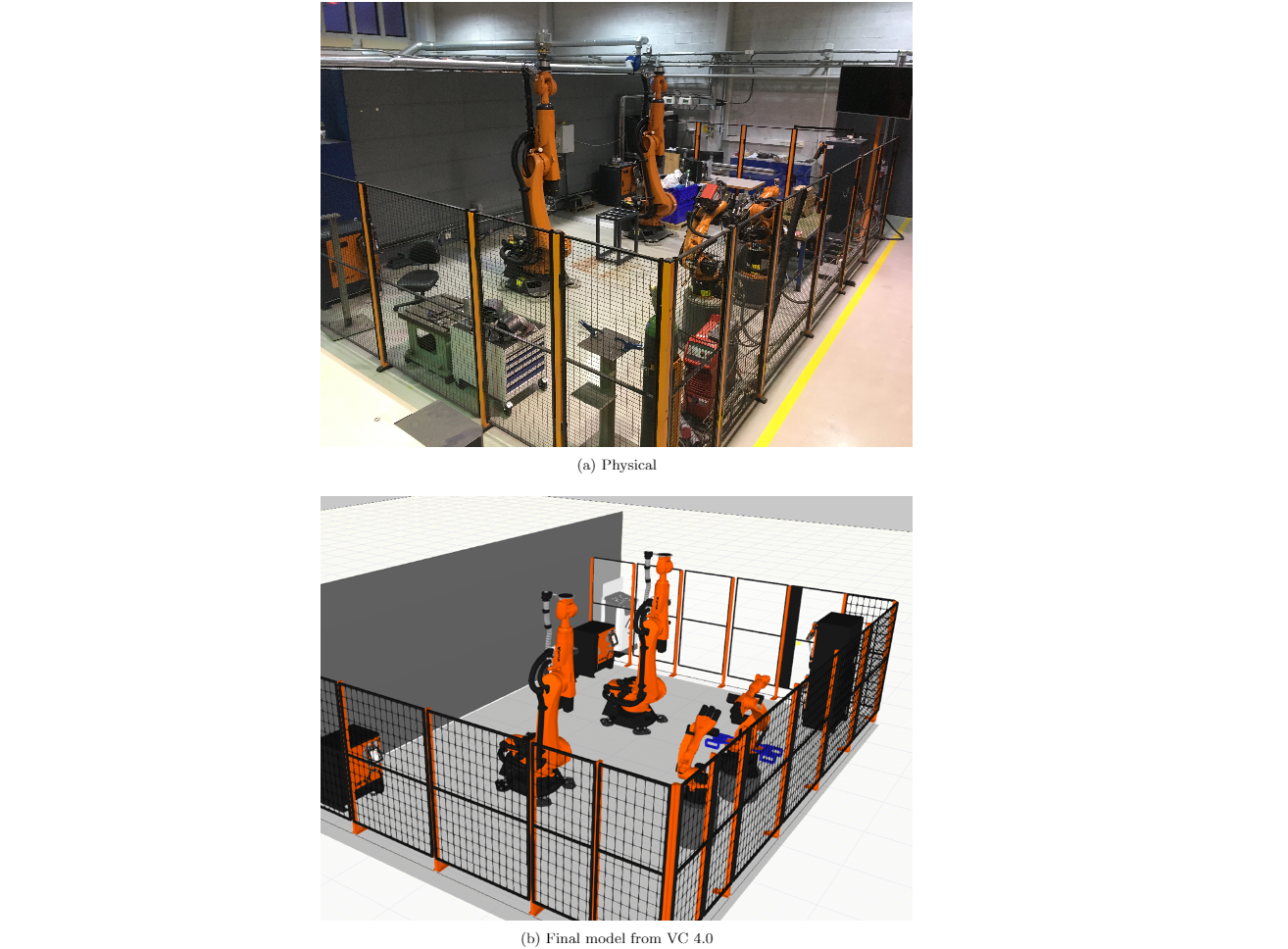
Рисунок 1: Робот -ячейка, физическая и цифровая
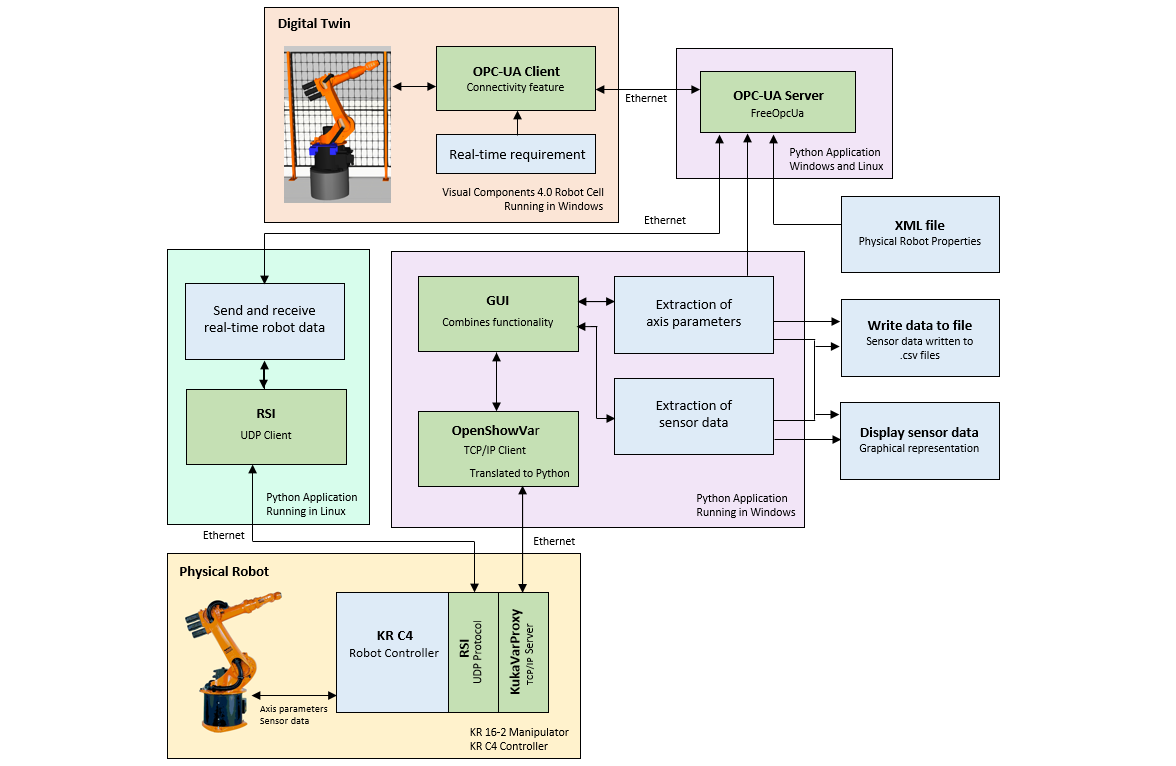 Рисунок 2: Текущая архитектура связи
Рисунок 2: Текущая архитектура связи
GUI для запуска Visual Components 4.0 OPC UA Connection, отображая данные датчика робота и написание данных в файлах .csv.
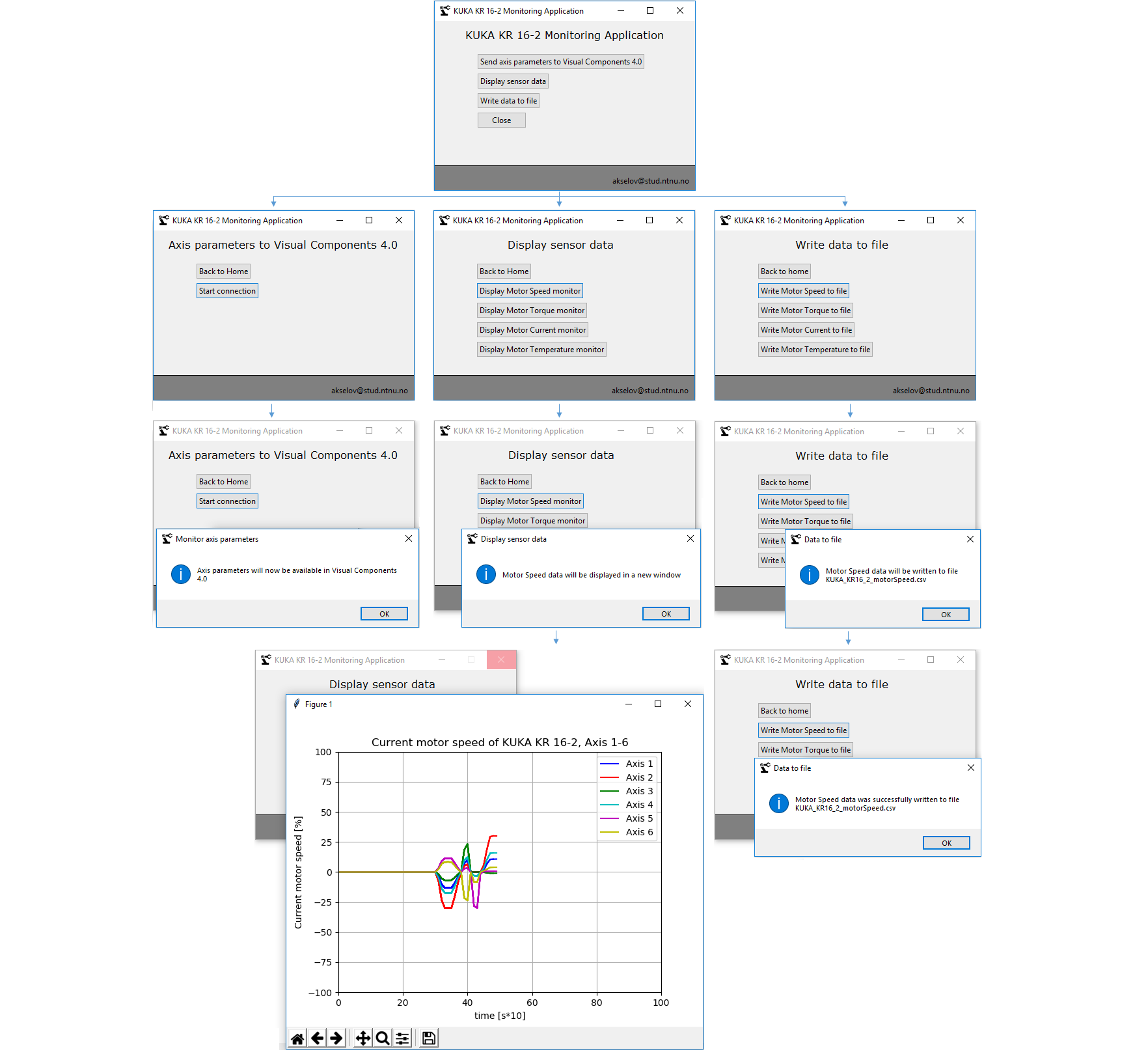 Рисунок 3: GUI
Рисунок 3: GUI
Эта библиотека содержит два файла робот -ячейки из VC 4.0:
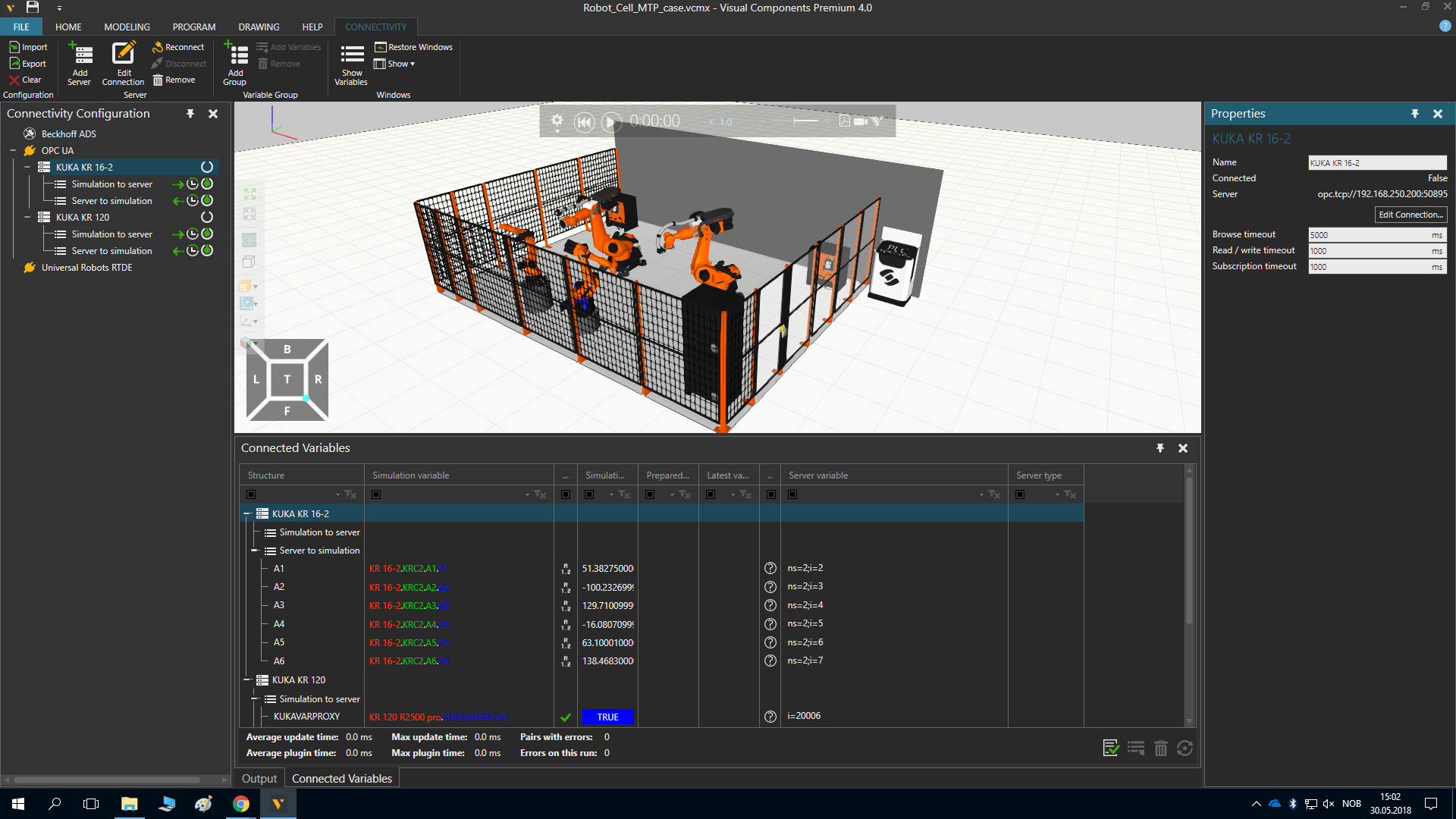 Рисунок 4: Снимок экрана от VC 4.0
Рисунок 4: Снимок экрана от VC 4.0
Программное обеспечение, разработанное в этом проекте, основано на работе:


