digital twin opcua
1.0.0
Repositori ini berisi file yang digunakan dalam pengembangan Digital Twin (DTW) untuk sel robot di NTNU dengan penggunaan komponen visual 4.0 (VC 4.0) dan OPC UA.
Tesis Master: http://hdl.handle.net/11250/2561319
Kelas: a
Sistem saat ini berisi fungsionalitas berikut:
Itu dilakukan case tetap dengan pelacakan kamera untuk menggambarkan beberapa fungsi DTW:
https://youtu.be/xlqhqpmjwla
Untuk informasi lebih lanjut tentang perbaikan, lihat Bagian Laporan Proyek 5.1.2:
http://hdl.handle.net/11250/2561319
Proyek ini diprakarsai oleh Universitas Sains dan Teknologi Norwegia (NTNU), Departemen Teknologi Produksi. Tujuan dari proyek ini adalah sebagai berikut:
Untuk merespons dengan cepat peristiwa yang tidak terduga dan tuntutan baru tanpa perubahan sistem yang luas, sistem produksi masa depan harus dapat bekerja lebih mandiri. Ada kebutuhan untuk mesin cerdas yang melakukan tugas -tugas kompleks tanpa pemrograman terperinci dan tanpa interaksi manusia. Sistem otonom mengetahui kemampuan mereka sendiri (yang dimodelkan sebagai "keterampilan") dan keadaan mereka. Mereka dapat memilih antara serangkaian tindakan yang mungkin, mengatur dan melakukan keterampilan mereka. Untuk berhasil, sistem otonom perlu memiliki model realistis dari keadaan saat ini dari proses produksi dan perilaku sistem sendiri dalam interaksi dengan lingkungan eksternal - biasanya disebut kembar digital.
OPC Unified Architecture (OPC UA) adalah protokol platform-independen untuk komunikasi mesin-ke-mesin untuk otomatisasi industri yang dikembangkan oleh OPC Foundation. OPC berfokus pada mengakses sejumlah besar data real-time pada saat yang sama dengan kinerja sistem dipengaruhi seminimal mungkin. OPC UA memiliki potensi untuk menjadi fondasi penting di lingkungan industri masa depan di mana mesin memberikan "produksi sebagai layanan", dan semua mesin dan sensor dalam produksi adalah online (Internet of Things).
Dalam tugas ini, implementasi kembar digital akan dipelajari. Solusi harus dikembangkan yang menyediakan komunikasi yang mulus antara robot, PLS, dan sistem kontrol relevan lainnya yang dapat menjadi bagian dari sistem produksi industri, terkait dengan satu representasi digital dari sistem. Sistem harus diuji di Laboratorium Robot Institute.
a) Jelaskan bagaimana kembar digital dapat diimplementasikan menggunakan OPC UA.
b) Periksa kelebihan dan kekurangan menggunakan komponen visual 4.0 atau perangkat lunak simulasi serupa
untuk kembar digital.
c) Gunakan komponen visual 4.0 atau perangkat lunak simulasi serupa untuk memodelkan dan mensimulasikan sel robot di Institute.
d) Periksa kelebihan dan kekurangan menggunakan kukavarproxy dan kuka rsi ethernet sebagai middleware
antara pengontrol robot KUKA KR C4 dan kembar digital.
e) menyajikan solusi untuk kembar digital dari laboratorium robot Institute dengan penggunaan OPC UA untuk komunikasi.
f) Cobalah sistem dalam kasus tetap. Mengevaluasi hasilnya.
Proyek ini mengeksplorasi istilah industri 4.0 (I 4.0) dan penggunaan kembar digital (DTWS) sebagai aset dalam revolusi industri modern ini. DTW dapat digambarkan sebagai replika digital dari sistem fisik termasuk data tentang interaksi sistem ini dengan lingkungannya. Tujuan dari proyek ini adalah mengembangkan DTW untuk sel robot di MTP Valgrinda, NTNU, dan menyelidiki manfaat apa yang dapat diperoleh dari memperkenalkan teknologi dalam sistem ini dan domain sistem robot otomatis secara umum.
DTW dikembangkan menggunakan arsitektur komunikasi OPC UA. OPC UA disebut pelopor I 4.0 karena merupakan arsitektur komunikasi yang bertujuan untuk standardisasi komunikasi dalam industri. Tiga solusi perangkat lunak visualisasi yang berbeda dibandingkan. Disimpulkan bahwa Visual Components 4.0 (VC 4.0) adalah kandidat terkuat untuk mengembangkan representasi visual sel robot. Menggunakan VC 4.0 dan OPC UA A DTW dari sel robot dibuat.
Sebagian besar pekerjaan yang dilakukan dalam proyek ini berputar di sekitar menciptakan modul komunikasi yang dapat menghubungkan sel robot fisik dengan representasi virtual di VC 4.0, melalui penggunaan OPC UA. Hasil dari pekerjaan ini adalah perpustakaan komunikasi yang berisi representasi virtual dari sel robot dan berbagai modul komunikasi yang dapat memberikan berbagai fungsi DTW. Perpustakaan ini dibuat open-source dan dapat ditemukan di repositori gitub proyek di
https://github.com/akselov/digital-twin-opcua
Perangkat lunak yang termasuk dalam perpustakaan ini memungkinkan DTW untuk melakukan mirroring waktu nyata dari gerakan robot fisik, merencanakan data sensor robot dan mengendalikan robot dari DTW. Antarmuka pengguna grafis dikembangkan untuk mengatur fungsionalitas. Gambar 2 mengilustrasikan arsitektur komunikasi saat ini untuk DTW.
DTW diuji dalam kasus tetap. Ini adalah kasus multi-robot termasuk mirroring gerakan, plot data sensor dan kontrol dari VC 4.0. Itu dibuat video dari kasus yang diterbitkan secara online di
https://youtu.be/xlqhqpmjwla
Disimpulkan bahwa OPC UA adalah solusi yang baik untuk digunakan dalam DTW ini karena dimungkinkan untuk diimplementasikan pada platform apa pun, dan memungkinkan cara berkomunikasi yang lebih fleksibel dan terstruktur daripada perangkat lunak komunikasi tradisional yang digunakan dalam sistem berbasis klien/server. Manfaat yang ditemukan dengan penggunaan DTW dalam sistem robot otomatis ini termasuk visibilitas untuk operasi dan fondasi yang lebih baik untuk analisis statistik untuk memprediksi keadaan di masa depan dan untuk mengoptimalkan parameter karakteristik yang terkait dengan sel robot. Akhirnya, disimpulkan bahwa DTW Act sebagai fondasi yang baik untuk mengelola sistem yang kompleks, sesuatu yang dapat bermanfaat karena sistem spesifik ini digunakan dalam pelatihan dan pengembangan profesional di Institute.
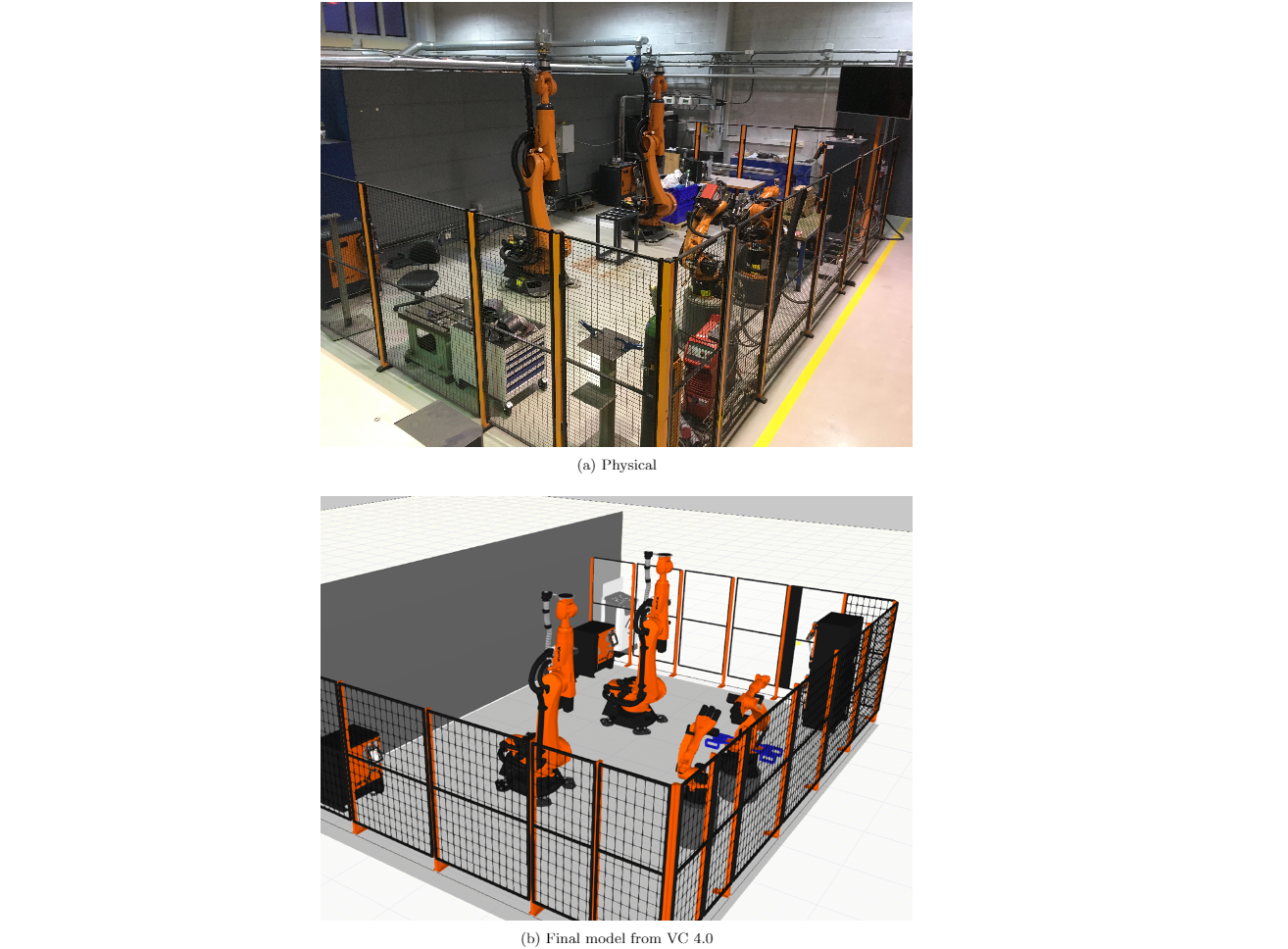
Gambar 1: Sel robot, fisik dan digital
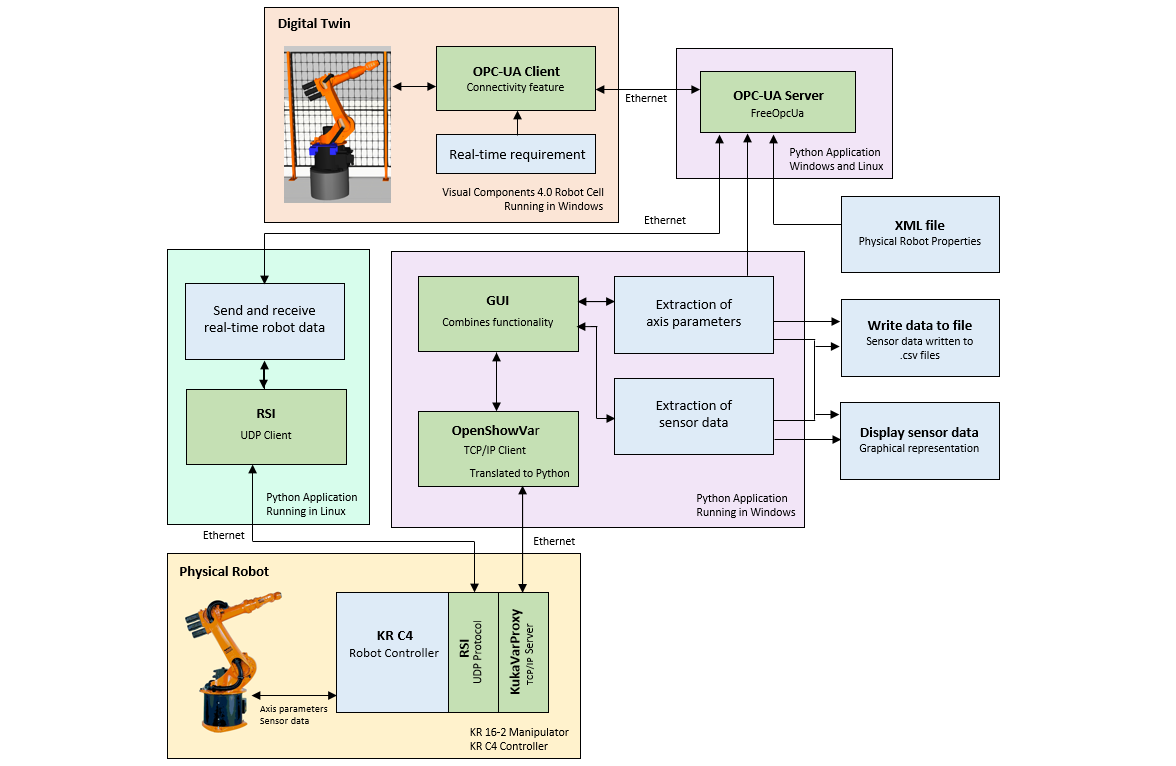 Gambar 2: Arsitektur komunikasi saat ini
Gambar 2: Arsitektur komunikasi saat ini
GUI untuk meluncurkan Komponen Visual 4.0 OPC UA Connection, menampilkan data sensor robot dan menulis data ke file .csv.
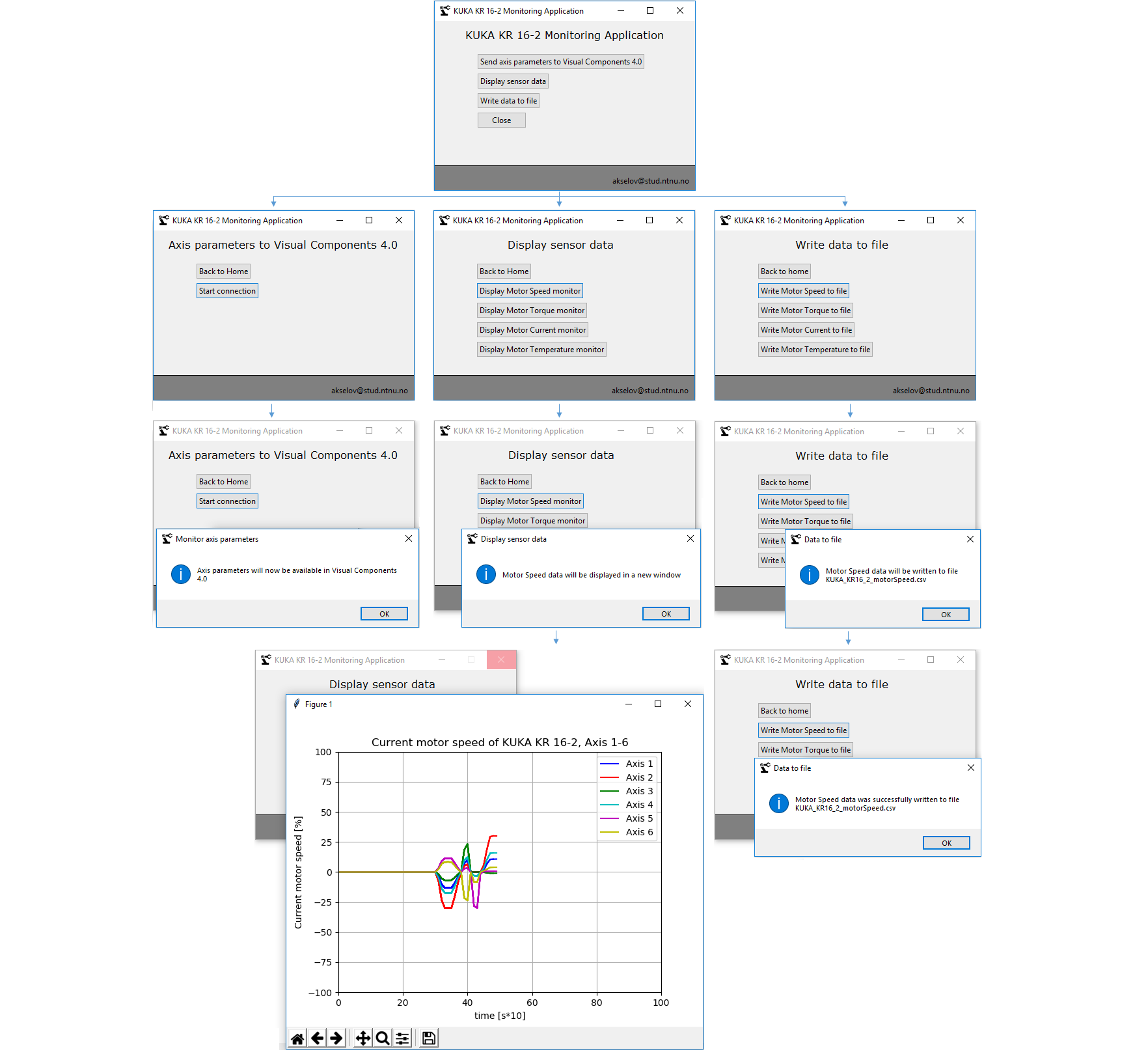 Gambar 3: GUI
Gambar 3: GUI
Perpustakaan ini berisi dua file sel robot dari VC 4.0:
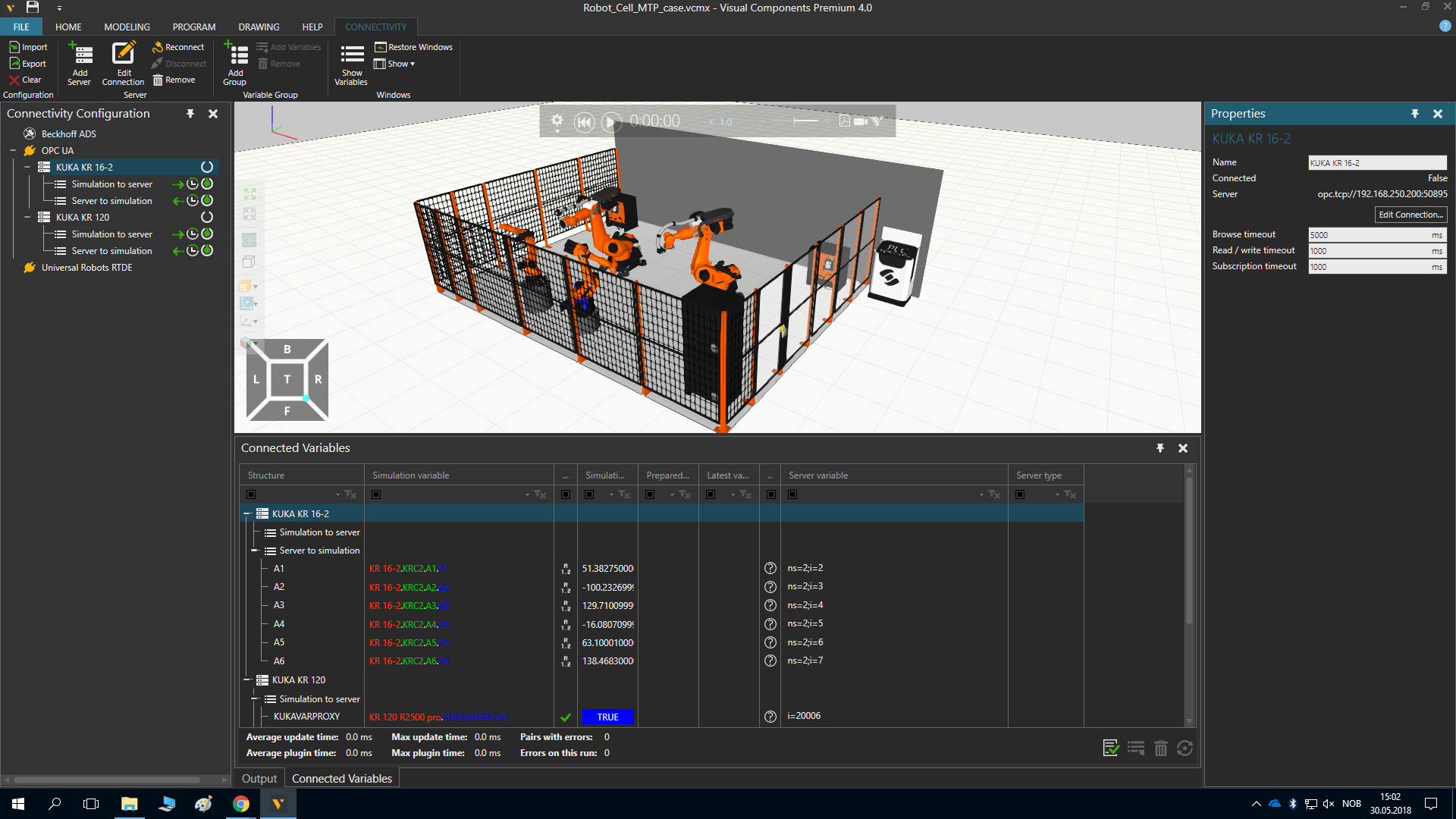 Gambar 4: Tangkapan layar dari VC 4.0
Gambar 4: Tangkapan layar dari VC 4.0
Perangkat lunak yang dikembangkan dalam proyek ini didasarkan pada pekerjaan oleh:


