fastest lap
v0.5
最快的圈是車輛動力學模擬器。它可以用來了解車輛動態,了解駕駛技術,設計汽車原型或只是為了娛樂!
數值GG圖:給定車輛和速度以計算其軸圖。 GG圖是車輛設計和參數探索的有用技術。
這是作為優化問題解決的:對於給定的側向加速度,找到最小/最大可行的縱向加速度。
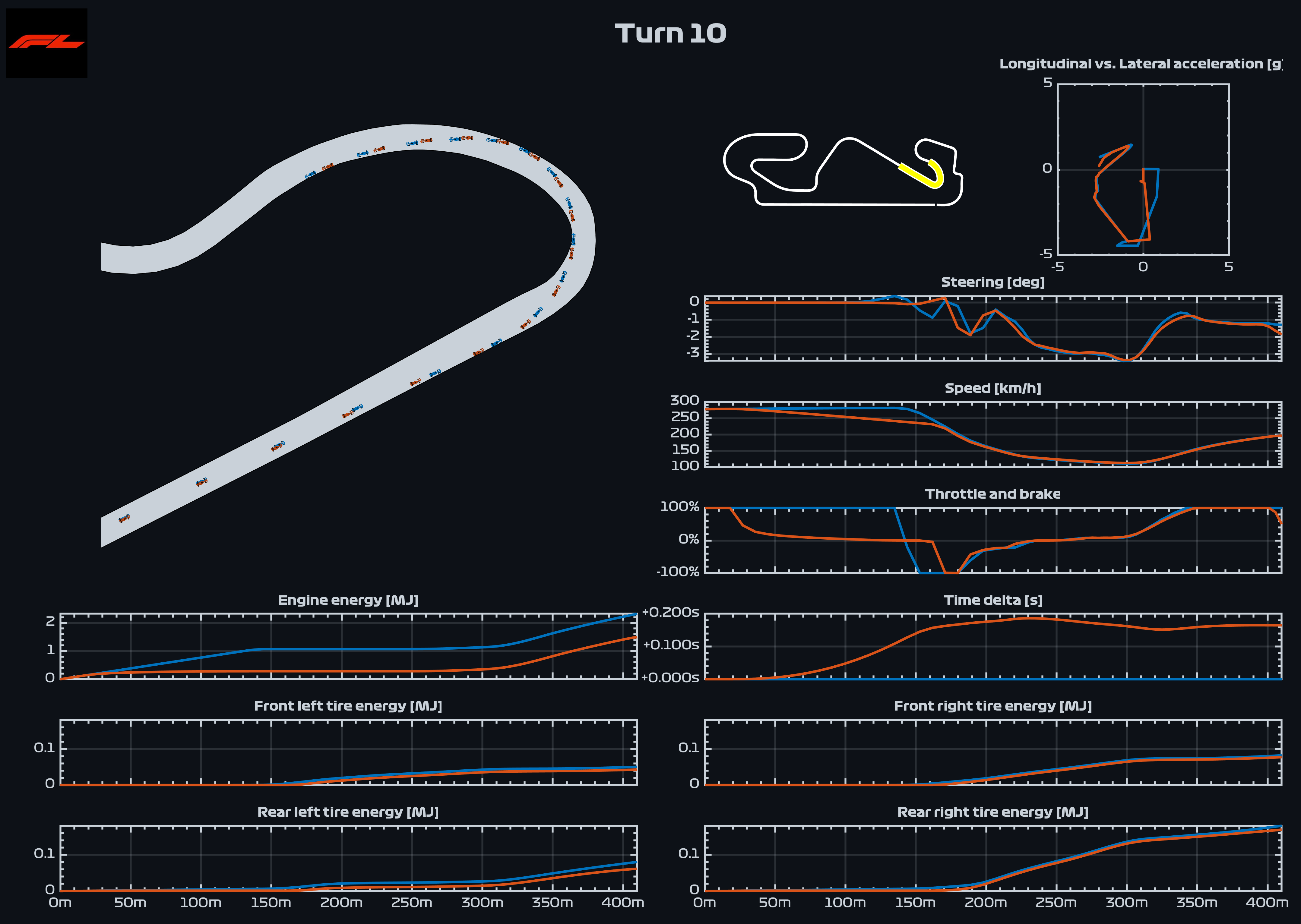
最佳的調理模擬:給定車輛和電路,以計算最小化的最佳控制。
使用一階置式方法(梯形規則)解決此問題,併計劃盡快實施高階方法。使用IPOPT解決NLP,並提高CPPAD(CPPAD)(在大約1分鐘內可以用500點獲得CATALUNYA圍繞的圈速)。
這不是準穩態模擬。該模型像沒有穩態假設的動態方程一樣求解完全瞬態狀態。
該軟件的核心是C ++庫,可以通過Python API使用。尚不可用的完整文檔,但可以在示例/python中找到一些示例。最快的圈非常有效,能夠在不到1分鐘的時間內計算完整的最佳圈。
該代碼實現了兩個汽車型號:
電路是根據由Google Earth創建的路徑建模的,例如,此存儲庫中包含Catalunya的正確軌道極限(數據庫/google_earth/catalunya_right.kml)。然後,用本文包含的工具對電路進行預處理,以提取參考線,其曲率以及與左/右軌道極限(數據庫/catalunya_discrete.xml)的距離。
最快的圈使用幾個開源庫:
每個版本都可以下載預編譯的二進製文件。
下載並解壓縮。拉鍊文件夾的內容是:
loadlibrary()到此目錄。PYTHONPATH上該項目使用CMAKE構建源代碼並生產二進製文件。
編譯CMAKE項目的規範步驟是:(假設$FASTESTLAP是源代碼的頂級。)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
可用於CMAKE的選項是:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
在此階段,CMAKE將下載並安裝所有第三方依賴關係。
make
ctest --verbose
make install
提供了Docker構建環境,可用於編譯共享庫並生成Python綁定。
sh ./src/scripts/linux/docker_compile.sh閱讀最新的最快的在線文檔
[1] Tremlett,AJ和DJN Limebeer。 “一級方程式賽車的最佳輪胎使用情況。”車輛系統動力學54.10(2016):1448-1473。
[2] Lot,Roberto和Nicola Dal Bianco。 “賽車卡丁車的單圈時間優化。”車輛系統動力學54.2(2016):210-230。
[3] Dal Bianco,Nicola,Roberto Lot和Marco Gadola。 “ GP2賽車的最低時間最佳控制模擬。”機械工程師學會論文集,第D部分:汽車工程雜誌232.9(2018):1180-1195。
[4] Lot,Roberto和Matteo Massaro。 “道路車輛多體模型的象徵性方法。”國際應用機械雜誌9.05(2017):1750068。
[5] Kelly,Daniel P.和Robin S. Sharp。 “賽車的時間最佳控制:一種模擬理想驅動程序的數值方法。”車輛系統動力學48.12(2010):1461-1474。
[6] Piccinini,Mattia。 “在處理範圍內對自動駕駛車輛的路徑規劃和控制”
[7] Casanova,D。
[8] Perantoni,G。等。 “具有可變參數的一級方程式汽車的最佳控制”


