fastest lap
v0.5
Fastest-Lap เป็นเครื่องจำลองการเปลี่ยนแปลงของยานพาหนะ มันสามารถใช้เพื่อทำความเข้าใจการเปลี่ยนแปลงของยานพาหนะเพื่อเรียนรู้เกี่ยวกับเทคนิคการขับขี่การออกแบบต้นแบบรถยนต์หรือเพื่อความสนุกสนาน!
ไดอะแกรม GG เชิงตัวเลข: ให้ยานพาหนะและความเร็วในการคำนวณแผนภาพขวาน แผนภาพ GG เป็นเทคนิคที่มีประโยชน์ในการออกแบบยานพาหนะและการสำรวจพารามิเตอร์
สิ่งนี้ได้รับการแก้ไขเป็นปัญหาการเพิ่มประสิทธิภาพ: สำหรับการเร่งความเร็วด้านข้างที่กำหนดให้ค้นหาการเร่งความเร็วระยะยาวขั้นต่ำ/สูงสุดที่เป็นไปได้
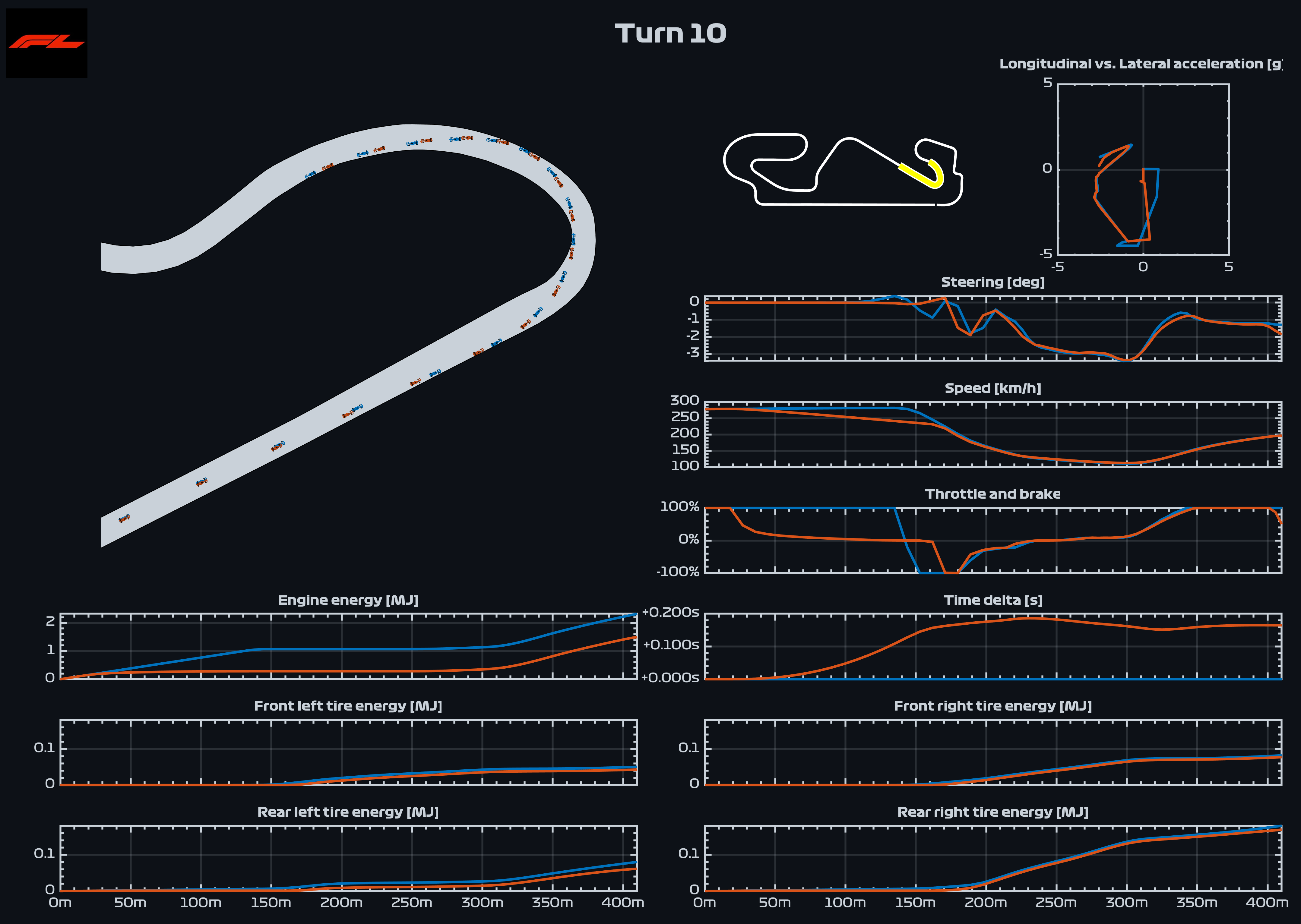
การจำลอง Laptime ที่ดีที่สุด: ให้ยานพาหนะและวงจรเพื่อคำนวณการควบคุมที่ดีที่สุดที่ลด laptime
ปัญหานี้ได้รับการแก้ไขโดยใช้วิธีการจัดระเบียบลำดับแรกกฎสี่เหลี่ยมคางหมูที่มีวิธีการสั่งซื้อสูงกว่าวางแผนที่จะดำเนินการในไม่ช้า NLP ได้รับการแก้ไขโดยใช้ IPOPT และ CPPAD เพื่อเพิ่มประสิทธิภาพ (รอบเวลารอบ Circuit de Catalunya สามารถรับได้ 500 คะแนนในเวลาประมาณ 1 นาที)
นี่ไม่ใช่การจำลองแบบกึ่งสเตทรัฐ แบบจำลองแก้สถานะชั่วคราวอย่างเต็มที่เช่นเดียวกับในสมการไดนามิกโดยไม่มีสมมติฐานคงที่
แกนกลางของซอฟต์แวร์คือไลบรารี C ++ ที่สามารถใช้งานได้ผ่าน Python API เอกสารฉบับเต็มยังไม่พร้อมใช้งาน แต่บางตัวอย่างสามารถพบได้ในตัวอย่าง/Python การแข่งขันที่เร็วที่สุดนั้นมีประสิทธิภาพมากสามารถคำนวณรอบที่เหมาะสมที่สุดในเวลาน้อยกว่า 1 นาที
รหัสใช้สองรุ่นรถยนต์:
วงจรถูกจำลองจากเส้นทางที่สร้างขึ้นจาก Google Earth ตัวอย่างเช่นขีด จำกัด การติดตามที่ถูกต้องของ Catalunya รวมอยู่ในที่เก็บนี้ (ฐานข้อมูล/google_earth/catalunya_right.kml) วงจรจะถูกประมวลผลล่วงหน้าด้วยเครื่องมือที่รวมอยู่ในที่นี้เพื่อแยกสายอ้างอิงความโค้งของมันและระยะทางไปยังขีด จำกัด แทร็กซ้าย/ขวา (ฐานข้อมูล/catalunya_discrete.xml)
Fastest-Lap ใช้ห้องสมุดโอเพนซอร์ซหลายแห่ง:
มีการดาวน์โหลดไบนารีล่วงหน้าสำหรับทุกรุ่น
ดาวน์โหลดและคลายซิป เนื้อหาของโฟลเดอร์ซิปคือ:
loadlibrary() ไปยังไดเรกทอรีนี้PYTHONPATHโครงการนี้ใช้ CMAKE เพื่อสร้างซอร์สโค้ดและสร้างไบนารี
ขั้นตอนที่เป็นที่ยอมรับในการรวบรวมโครงการ CMake คือ: (สมมติว่า $FASTESTLAP เป็นระดับสูงสุดของซอร์สโค้ด)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
ตัวเลือกที่มีให้สำหรับ cmake คือ:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
ในขั้นตอนนี้ CMake จะดาวน์โหลดและติดตั้งการพึ่งพาที่สามทั้งหมด
make
ctest --verbose
make install
สภาพแวดล้อมการสร้างท่าเทียบเรือมีให้และสามารถใช้ในการรวบรวมไลบรารีที่ใช้ร่วมกันและสร้างการผูก Python
sh ./src/scripts/linux/docker_compile.shอ่านเอกสารออนไลน์ที่เร็วที่สุดที่เร็วที่สุด
[1] Tremlett, AJ และ DJN Limebeer "การใช้ยางที่ดีที่สุดสำหรับรถสูตรหนึ่ง" การเปลี่ยนแปลงของระบบยานพาหนะ 54.10 (2016): 1448-1473
[2] Lot, Roberto และ Nicola Dal Bianco "การเพิ่มประสิทธิภาพรอบเวลาของการแข่งโกคาร์ท" การเปลี่ยนแปลงของระบบยานพาหนะ 54.2 (2016): 210-230
[3] Dal Bianco, Nicola, Roberto Lot และ Marco Gadola "การจำลองการควบคุมที่ดีที่สุดของเวลาขั้นต่ำของรถแข่ง GP2" การดำเนินการของสถาบันวิศวกรเครื่องกลส่วน D: วารสารวิศวกรรมรถยนต์ 232.9 (2018): 1180-1195
[4] Lot, Roberto และ Matteo Massaro "วิธีการเชิงสัญลักษณ์ในการสร้างแบบจำลองมัลติบอดี้ของยานพาหนะบนท้องถนน" วารสารนานาชาติของกลไกประยุกต์ 9.05 (2017): 1750068
[5] Kelly, Daniel P. และ Robin S. Sharp "การควบคุมเวลาที่เหมาะสมของรถแข่ง: วิธีตัวเลขเพื่อเลียนแบบไดรเวอร์ในอุดมคติ" การเปลี่ยนแปลงของระบบยานพาหนะ 48.12 (2010): 1461-1474
[6] Piccinini, Mattia "การวางแผนเส้นทางและการควบคุมยานพาหนะที่ขับเคลื่อนด้วยตนเองในขอบเขตของการจัดการ"
[7] Casanova, D. "ในเวลาขั้นต่ำของยานพาหนะการหลบหลีก: ตักที่ดีที่สุดทางทฤษฎี"
[8] Perantoni, G. et al. "การควบคุมที่ดีที่สุดสำหรับรถสูตรหนึ่งที่มีพารามิเตอร์ตัวแปร"


