fastest lap
v0.5
La más rápida es un simulador de dinámica de vehículos. ¡Se puede utilizar para comprender la dinámica del vehículo, para aprender sobre las técnicas de conducción, diseñar prototipos de automóviles o simplemente por diversión!
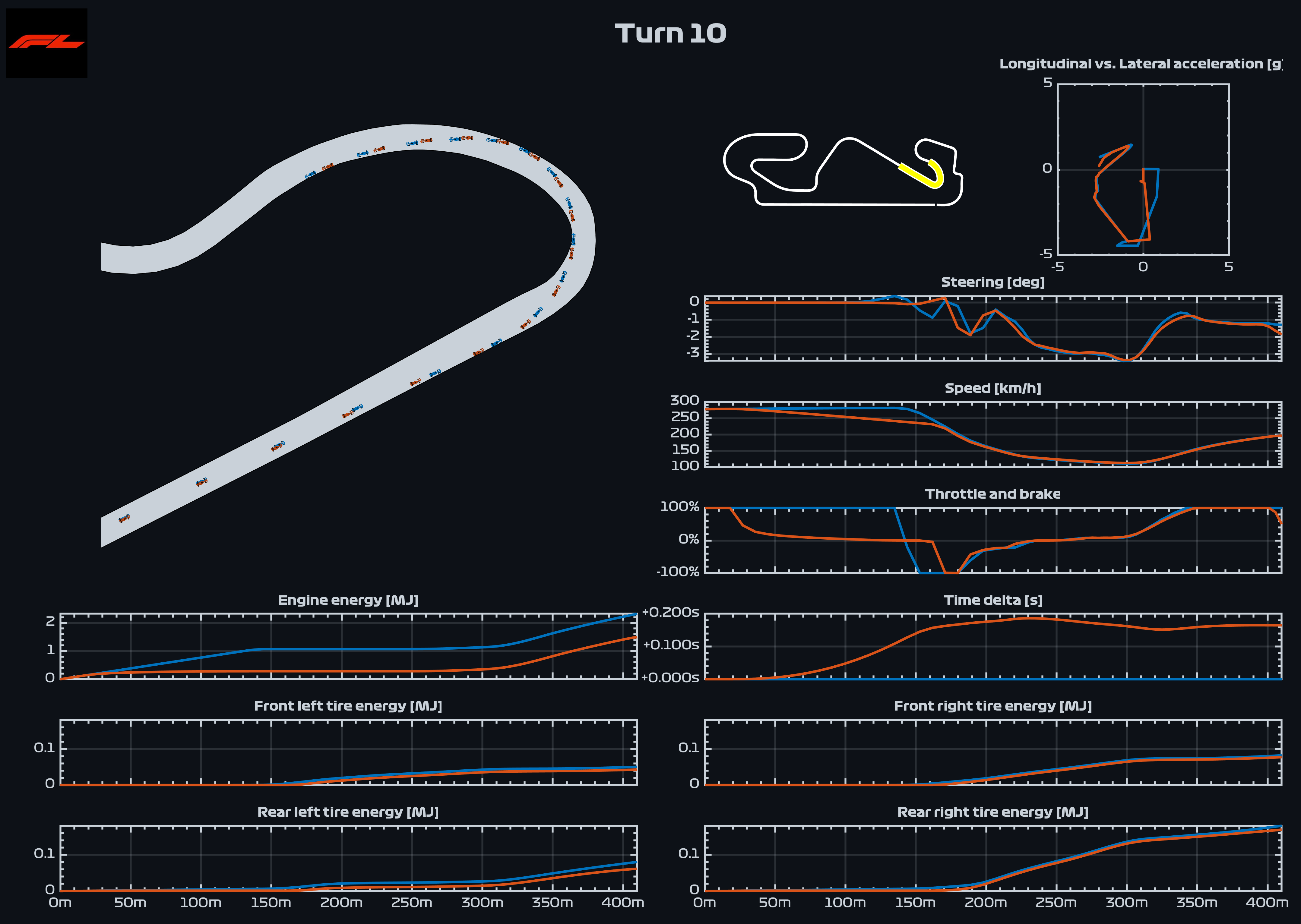
Diagrama numérico de GG: dado un vehículo y una velocidad, para calcular su diagrama de hacha. El diagrama GG es una técnica útil en el diseño del vehículo y la exploración de parámetros.
Esto se resuelve como un problema de optimización: para una aceleración lateral dada, encuentre la aceleración longitudinal mínima/máxima factible.
Simulación óptima de la hora del lapso: dado un vehículo y un circuito, para calcular los controles óptimos que minimizan el lapto.
Este problema se resuelve utilizando un método de colocación de primer orden, la regla trapezoidal, con métodos de orden superior planeados para implementarse pronto. El PNL se resuelve usando IPOPT y CPPAD para mejorar su rendimiento (un tiempo de vuelta alrededor del circuito de Catalunya se puede obtener con 500 puntos en aproximadamente 1 minuto).
Esta no es una simulación cuasi-estatal. El modelo resuelve los estados completamente transitorios como en las ecuaciones dinámicas sin supuestos de estado estacionario.
El núcleo del software es una biblioteca C ++, que se puede usar a través de una API de Python. La documentación completa aún no está disponible, pero algunos ejemplos se pueden encontrar en ejemplos/python. La más rápida es muy eficiente, poder calcular una vuelta óptima completa en menos de 1 minuto.
El código implementa dos modelos de automóvil:
Los circuitos se modelan a partir de las rutas creadas desde Google Earth, por ejemplo, el límite de pista correcto de Catalunya se incluye en este repositorio (Base de datos/Google_Earth/Catalunya_Right.kml). Luego, los circuitos se preprocesan con una herramienta incluida aquí para extraer una línea de referencia, su curvatura y la distancia a los límites de la pista izquierda/derecha (base de datos/catalunya_discrete.xml).
Fast-LAP utiliza varias bibliotecas de código abierto:
Los binarios precompilados están disponibles para descargar para cada lanzamiento.
Descargar y descifrar. Los contenidos de la carpeta zip son:
loadlibrary() a este directorio.PYTHONPATHEste proyecto utiliza CMake para construir el código fuente y producir los binarios.
Los pasos canónicos para compilar un proyecto CMake son: (suponga que $FASTESTLAP es el nivel superior del código fuente).
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
Las opciones disponibles para Cmake son:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
En esta etapa, Cmake descargará e instalará todas las dependencias de terceros.
make
ctest --verbose
make install
Se proporciona un entorno de compilación Docker y se puede utilizar para compilar la biblioteca compartida y generar las enlaces de Python.
sh ./src/scripts/linux/docker_compile.shLea la última documentación en línea de vueltas más rápidas
[1] Tremlett, AJ y DJN LimeBeer. "Uso óptimo de los neumáticos para un auto de Fórmula Uno". Vehicle System Dynamics 54.10 (2016): 1448-1473.
[2] Lot, Roberto y Nicola Dal Bianco. "Optimización del tiempo de vuelta de un go-kart de carreras". Vehicle System Dynamics 54.2 (2016): 210-230.
[3] Dal Bianco, Nicola, Roberto Lot y Marco Gadola. "Tiempo mínimo Simulación de control óptimo de un auto de carrera GP2". Actas de la institución de ingenieros mecánicos, Parte D: Journal of Automobile Engineering 232.9 (2018): 1180-1195.
[4] Lot, Roberto y Matteo Massaro. "Un enfoque simbólico para el modelado multibuerpo de vehículos de carretera". International Journal of Applied Mechanics 9.05 (2017): 1750068.
[5] Kelly, Daniel P. y Robin S. Sharp. "Control óptimo del tiempo del auto de carrera: un método numérico para emular al conductor ideal". Vehicle System Dynamics 48.12 (2010): 1461-1474.
[6] Piccinini, Mattia. "Planificación de ruta y control de vehículos autónomos en los límites del manejo"
[7] Casanova, D. "En la maniobra de vehículos de tiempo mínimo: la vuelta óptima teórica"
[8] Perantoni, G. et al. "Control óptimo para un automóvil de Fórmula Uno con parámetros variables"


