fastest lap
v0.5
Lap tercepat adalah simulator dinamika kendaraan. Ini dapat digunakan untuk memahami dinamika kendaraan, untuk belajar tentang teknik mengemudi, merancang prototipe mobil, atau hanya untuk bersenang -senang!
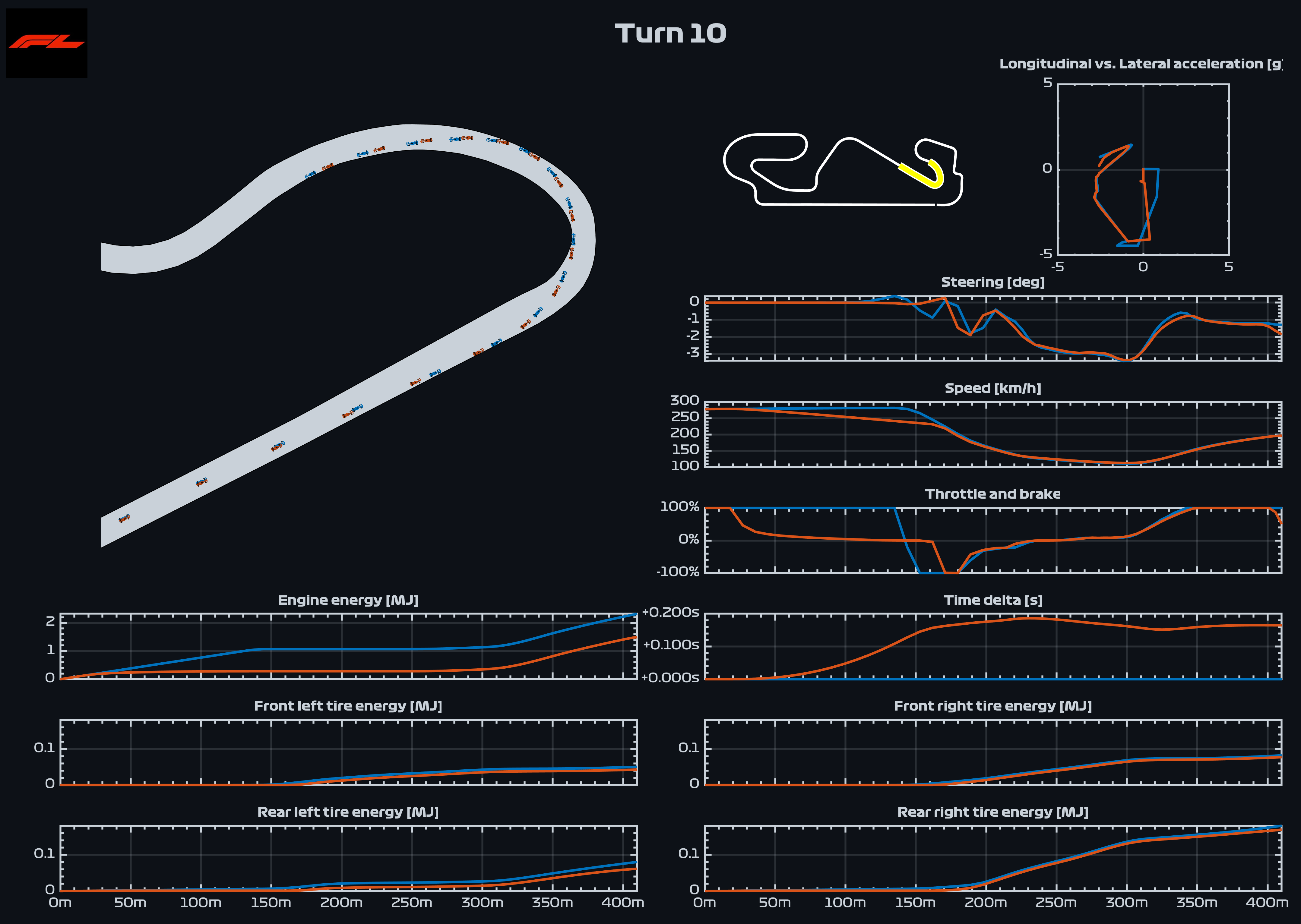
Diagram GG Numerik: Diberi kendaraan, dan kecepatan, untuk menghitung diagram Ax-AY-nya. Diagram GG adalah teknik yang berguna dalam desain kendaraan dan eksplorasi parameter.
Ini diselesaikan sebagai masalah optimisasi: untuk akselerasi lateral yang diberikan, temukan akselerasi longitudinal minimum/maksimum yang layak.
Simulasi Laptim Optimal: Diberikan kendaraan, dan sirkuit, untuk menghitung kontrol optimal yang meminimalkan lapik.
Masalah ini diselesaikan dengan menggunakan metode kolokasi pesanan pertama, aturan trapesium, dengan metode orde lebih tinggi direncanakan akan segera diimplementasikan. NLP diselesaikan dengan menggunakan IPOPT, dan CPPAD untuk meningkatkan kinerjanya (waktu putaran di sekitar sirkuit de Catalunya dapat diperoleh dengan 500 poin dalam waktu sekitar 1 menit).
Ini bukan simulasi quasi-steady-state. Model memecahkan keadaan sepenuhnya sementara seperti dalam persamaan dinamis tanpa asumsi kondisi mapan.
Inti dari perangkat lunak ini adalah perpustakaan C ++, yang dapat digunakan melalui API Python. Dokumentasi lengkap belum tersedia tetapi beberapa contoh dapat ditemukan dalam contoh/python. Lap tercepat sangat efisien, mampu menghitung putaran optimal penuh dalam waktu kurang dari 1 menit.
Kode ini mengimplementasikan dua model mobil:
Sirkuit dimodelkan dari jalur yang dibuat dari Google Earth, misalnya, batas trek kanan Catalunya termasuk dalam repositori ini (database/google_earth/catalunya_right.kml). Sirkuit kemudian diproses dengan alat yang disertakan di sini untuk mengekstrak garis referensi, kelengkungannya, dan jarak ke batas trek kiri/kanan (database/catalunya_discrete.xml).
Lap tercepat menggunakan beberapa perpustakaan open-source:
Binari yang telah dikompilasi tersedia untuk diunduh untuk setiap rilis.
Unduh dan unzip. Isi folder zip adalah:
loadlibrary() ke direktori ini.PYTHONPATHProyek ini menggunakan CMake untuk membangun kode sumber dan menghasilkan binari.
Langkah -langkah kanonik untuk mengkompilasi proyek CMake adalah: (Asumsikan $FASTESTLAP adalah kode sumber teratas.)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
Opsi yang tersedia untuk CMake adalah:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
Pada tahap ini, CMake akan mengunduh dan menginstal semua dependensi pihak ketiga.
make
ctest --verbose
make install
Lingkungan pembangunan Docker disediakan dan dapat digunakan untuk mengkompilasi perpustakaan bersama dan menghasilkan binding Python.
sh ./src/scripts/linux/docker_compile.shBaca dokumentasi online-mantel terkini terbaru
[1] Tremlett, AJ, dan DJN Limebeer. "Penggunaan ban optimal untuk mobil Formula Satu." Dinamika Sistem Kendaraan 54.10 (2016): 1448-1473.
[2] Lot, Roberto, dan Nicola Dal Bianco. "Optimalisasi waktu putaran go-kart balap." Dinamika Sistem Kendaraan 54.2 (2016): 210-230.
[3] Dal Bianco, Nicola, Roberto Lot, dan Marco Gadola. "Simulasi kontrol optimal waktu minimum mobil balap GP2." Prosiding Lembaga Insinyur Mesin, Bagian D: Jurnal Teknik Otomotif 232.9 (2018): 1180-1195.
[4] Lot, Roberto, dan Matteo Massaro. "Pendekatan simbolis untuk pemodelan multibodi kendaraan jalan." Jurnal Internasional Mekanika Terapan 9.05 (2017): 1750068.
[5] Kelly, Daniel P., dan Robin S. Sharp. "Kontrol waktu-optimal dari mobil balap: metode numerik untuk meniru pengemudi yang ideal." Dinamika Sistem Kendaraan 48.12 (2010): 1461-1474.
[6] Piccinini, Mattia. "Perencanaan Jalur dan Pengendalian Kendaraan Self-Driving Di Batas Penanganan"
[7] Casanova, D. "Pada waktu minimum, manuver kendaraan: pangkuan optimal teoretis"
[8] Perantoni, G. et al. "Kontrol Optimal untuk Mobil Formula Satu Dengan Parameter Variabel"


