fastest lap
v0.5
가장 빠른 랩은 차량 역학 시뮬레이터입니다. 차량 역학을 이해하거나 운전 기술에 대해 배우거나 자동차 프로토 타입을 설계하거나 재미를 위해 사용하는 데 사용할 수 있습니다!
수치 GG 다이어그램 : Ax-ay 다이어그램을 계산하기위한 차량과 속도가 주어집니다. GG 다이어그램은 차량 설계 및 매개 변수 탐색에 유용한 기술입니다.
이것은 최적화 문제로 해결됩니다. 주어진 측면 가속의 경우 최소/최대 실행 가능한 종 방향 가속도를 찾으십시오.
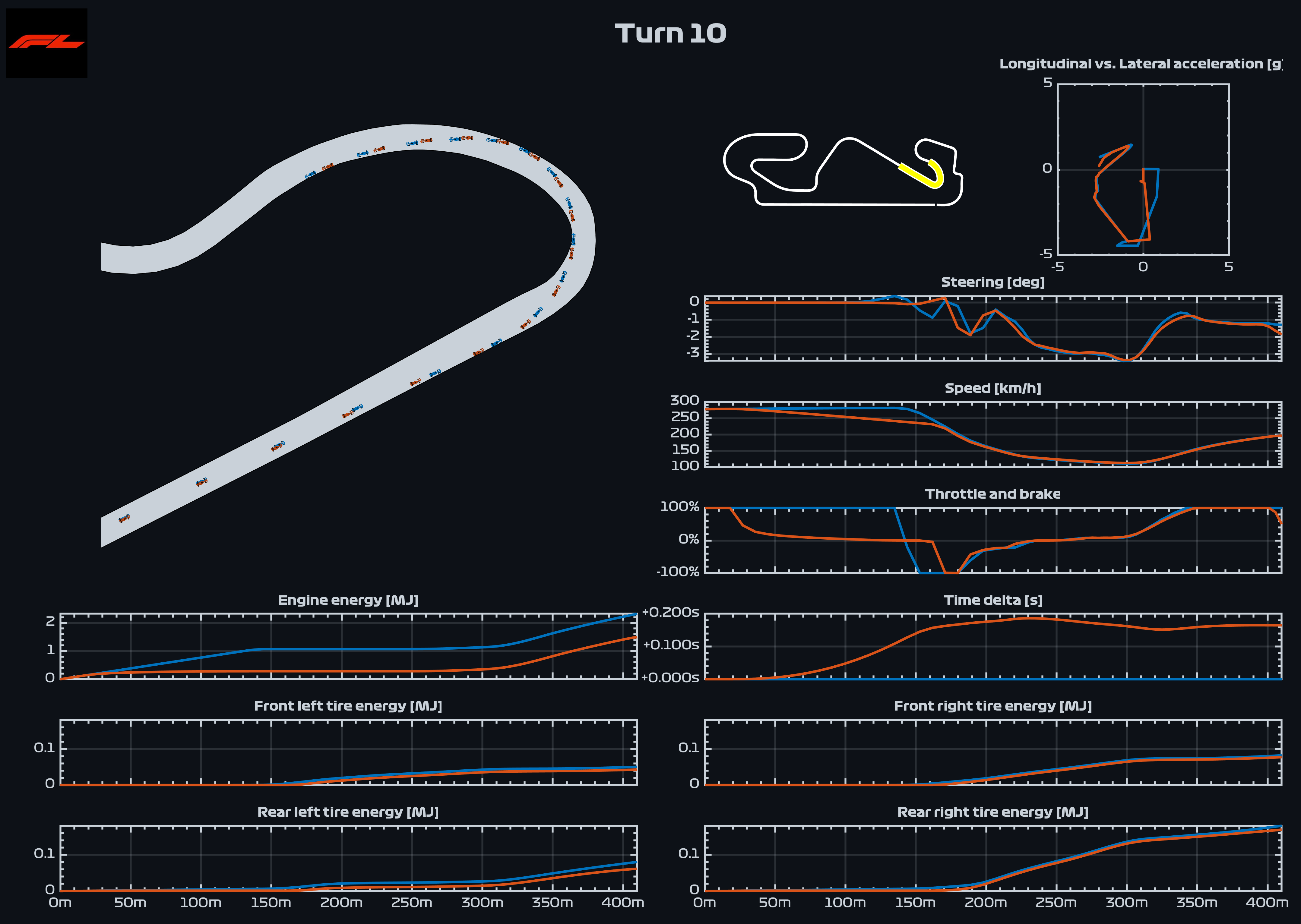
최적의 랩타임 시뮬레이션 : 차량 및 회로가 주어지면 랩타임을 최소화하는 최적의 컨트롤을 계산합니다.
이 문제는 1 차 배치 방법 인 사다리꼴 규칙을 사용하여 해결됩니다. NLP는 IPOPT 및 CPPAD를 사용하여 해결하여 성능을 향상시킵니다 (Circuit de Catalunya 주변의 랩 타임은 약 1 분 만에 500 포인트로 얻을 수 있음).
이것은 준 안정 상태 시뮬레이션이 아닙니다. 이 모델은 정상 상태 가정없이 동적 방정식에서와 같이 완전 과도 상태를 해결합니다.
소프트웨어의 핵심은 Python API를 통해 사용할 수있는 C ++ 라이브러리입니다. 전체 문서는 아직 사용할 수 없지만 일부 예제는 예/Python에서 찾을 수 있습니다. 가장 빠른 랩은 매우 효율적이며 1 분 이내에 최적의 최적 랩을 계산할 수 있습니다.
코드는 두 가지 자동차 모델을 구현합니다.
회로는 Google 어스 (Google Earth)에서 생성 된 경로에서 모델링됩니다. 예를 들어, 카탈루냐의 올바른 트랙 한계는이 저장소에 포함됩니다 (데이터베이스/Google_earth/Catalunya_right.kml). 이어서, 회로는 참조 라인, 곡률 및 왼쪽/오른쪽 트랙 한계까지의 거리 (데이터베이스/catalunya_discrete.xml)를 추출하기 위해 여기에 포함 된 도구로 전처리됩니다.
가장 빠른 랩은 여러 오픈 소스 라이브러리를 사용합니다.
사전 컴파일 된 바이너리는 모든 릴리스마다 다운로드 할 수 있습니다.
다운로드하고 압축을 풀니다. 지퍼 폴더의 내용은 다음과 같습니다.
loadlibrary() 이 디렉토리로 사용됩니다.PYTHONPATH 에 있는지 확인하십시오.이 프로젝트는 CMAKE를 사용하여 소스 코드를 구축하고 바이너리를 생성합니다.
Cmake 프로젝트를 컴파일하는 표준 단계는 다음과 같습니다. ( $FASTESTLAP 소스 코드 최상위 레벨이라고 가정합니다.)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
CMake에 사용할 수있는 옵션은 다음과 같습니다.
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
이 단계에서 Cmake는 모든 타사 종속성을 다운로드하여 설치합니다.
make
ctest --verbose
make install
도커 빌드 환경이 제공되며 공유 라이브러리를 컴파일하고 파이썬 바인딩을 생성하는 데 사용될 수 있습니다.
sh ./src/scripts/linux/docker_compile.sh최신 가장 빠른 랩 온라인 문서를 읽으십시오
[1] Tremlett, AJ 및 DJN Limebeer. "포뮬러 원 차량의 최적 타이어 사용." 차량 시스템 역학 54.10 (2016) : 1448-1473.
[2] Lot, Roberto 및 Nicola Dal Bianco. "레이싱 카트의 랩 타임 최적화." 차량 시스템 역학 54.2 (2016) : 210-230.
[3] Dal Bianco, Nicola, Roberto Lot 및 Marco Gadola. "GP2 경주 용 자동차의 최소 시간 최적 제어 시뮬레이션." 기계 엔지니어 기관의 절차, Part D : Journal of Automobile Engineering 232.9 (2018) : 1180-1195.
[4] Lot, Roberto 및 Matteo Massaro. "도로 차량의 다중 모델링에 대한 상징적 접근." International Journal of Applied Mechanics 9.05 (2017) : 1750068.
[5] Kelly, Daniel P. 및 Robin S. Sharp. "경주 용 자동차의 시간 최적 제어 : 이상적인 운전자를 모방하는 수치 적 방법." 차량 시스템 역학 48.12 (2010) : 1461-1474.
[6] Piccinini, Mattia. "취급 한계에서 자율 주행 차량의 경로 계획 및 제어"
[7] Casanova, D. "최소 시간 차량 기동 : 이론적 최적 랩"
[8] Parantoni, G. et al. "가변 매개 변수가있는 포뮬러 원 차량에 대한 최적의 제어"


