fastest lap
v0.5
Самый быстрый кружок-это симулятор динамики автомобиля. Его можно использовать, чтобы понять динамику транспортных средств, чтобы узнать о методах вождения, для разработки прототипов автомобилей или просто для удовольствия!
Численная диаграмма GG: с учетом транспортного средства и скорости для вычисления его диаграммы Ax-AY. Диаграмма GG является полезным методом в области дизайна транспортных средств и разведки параметров.
Это решается как проблема оптимизации: для данного бокового ускорения найдите минимальное/максимальное возможное продольное ускорение.
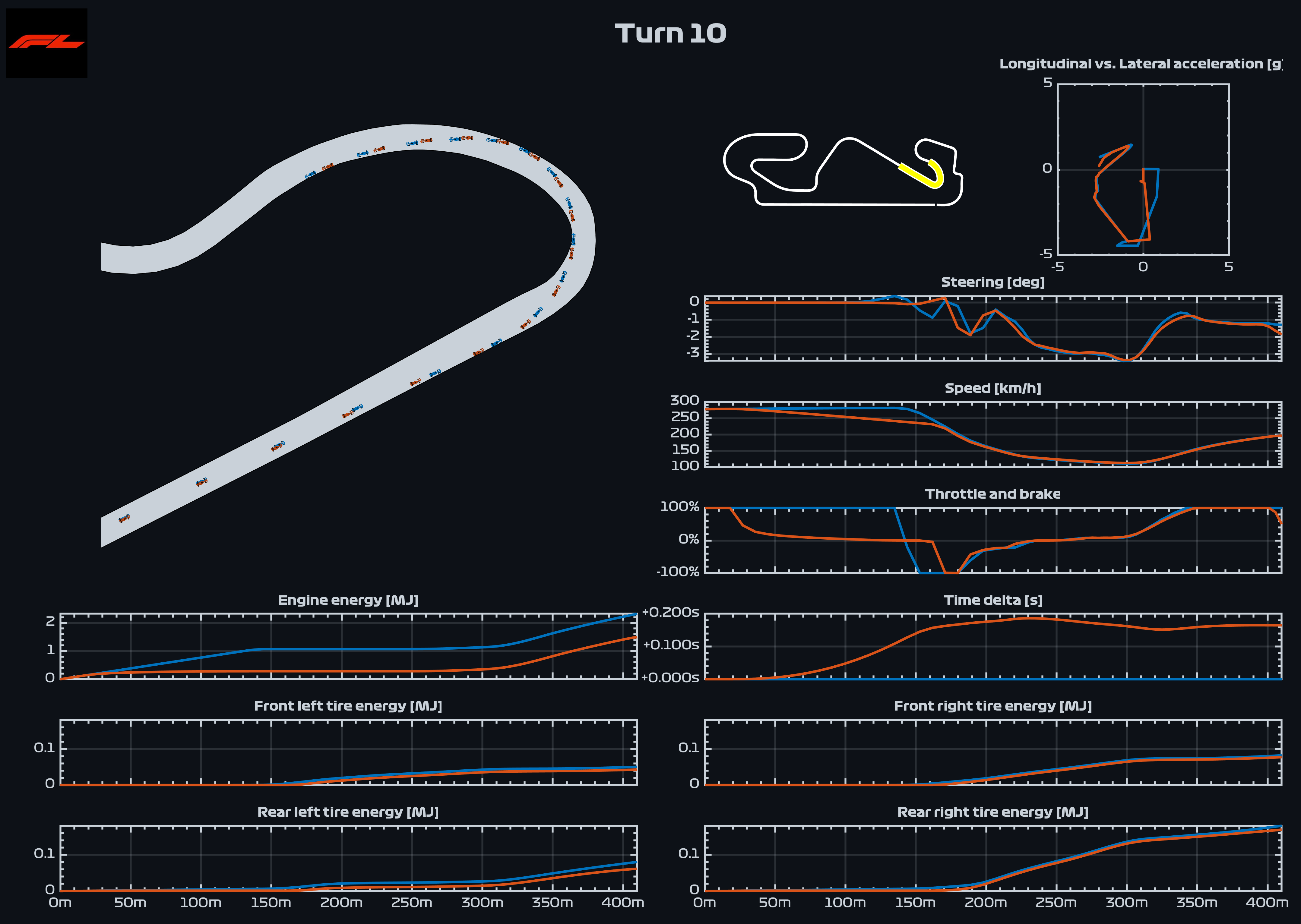
Оптимальное моделирование номера: с учетом транспортного средства и схемы для вычисления оптимальных элементов управления, которые минимизируют ночное время.
Эта проблема решается с использованием метода коллокации первого порядка, трапециевидного правила, с методами более высокого порядка, планируемых в ближайшее время. NLP решается с использованием IPOPT, и CPPAD для повышения его производительности (время круга вокруг цепь DE Catalunya может быть получено с 500 точками примерно за 1 минуту).
Это не квази-устроенное симуляцию. Модель решает полностью переходные состояния, как в динамических уравнениях без устойчивых допущений.
Ядро программного обеспечения - библиотека C ++, которую можно использовать через Python API. Полная документация еще не доступна, но некоторые примеры можно найти в примерах/Python. Самый быстрый кружок очень эффективен, способный вычислить полный оптимальный круг менее чем за 1 минуту.
Код реализует две модели автомобилей:
Схемы смоделированы из путей, созданных из Google Earth, например, правильный предел отслеживания каталонии включен в этот репозиторий (Database/Google_earth/Catalunya_right.kml). Затем схемы предварительно обрабатываются инструментом, включенным в данном документе для извлечения эталонной линии, ее кривизны и расстояния до предела левой/правой дорожки (база данных/Catalunya_discrete.xml).
Самая быстрая круга использует несколько библиотек с открытым исходным кодом:
Предварительные двоичные файлы доступны для загрузки для каждого выпуска.
Скачать и раскапывать. Содержимое папки ZIP:
loadlibrary() в этот каталог.PYTHONPATHЭтот проект использует Cmake для создания исходного кода и производства двоичных файлов.
Канонические шаги для компиляции проекта Cmake: (Предположим, что $FASTESTLAP - верхний уровень исходного кода.)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
Варианты, доступные для Cmake:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
На этом этапе Cmake загрузит и установит все сторонние зависимости.
make
ctest --verbose
make install
Предоставлена среда сборки Docker и может использоваться для составления общей библиотеки и генерации привязки Python.
sh ./src/scripts/linux/docker_compile.shПрочитайте последнюю онлайн-документацию по самым быстрым кружке
[1] Тремлетт, AJ и DJN Limebeer. «Оптимальное использование шин для автомобиля Формулы -1». Динамика системы транспортных средств 54.10 (2016): 1448-1473.
[2] Лот, Роберто и Никола Дал Бьянко. «Оптимизация времени круга гоночной карты». Динамика системы транспортных средств 54.2 (2016): 210-230.
[3] Дал Бьянко, Никола, Роберто Лот и Марко Гадола. «Минимальное оптимальное моделирование управления временем гоночного автомобиля GP2». Материалы института инженеров-механиков, часть D: Журнал автомобильной техники 232.9 (2018): 1180-1195.
[4] Лот, Роберто и Маттео Массаро. «Символический подход к моделированию мультизатора дорожных транспортных средств». Международный журнал прикладной механики 9.05 (2017): 1750068.
[5] Келли, Даниэль П. и Робин С. Шарп. «Временный оптимальный контроль над гоночным автомобилем: числовой метод подражания идеальному водителю». Динамика системы транспортных средств 48.12 (2010): 1461-1474.
[6] Пикцинини, Маттия. «Планирование пути и контроль транспортных средств самостоятельного вождения в пределах обработки»
[7] Казанова Д. «При минимальном времени маневрирование транспортных средств: теоретический оптимальный круг»
[8] Perantoni, G. et al. «Оптимальное управление автомобилем Формулы -1 с переменными параметрами»


