fastest lap
v0.5
最速ラップは、車両のダイナミクスシミュレーターです。車両のダイナミクスを理解したり、運転技術について学びたり、車のプロトタイプを設計したり、楽しみのために使用したりできます。
数値GG図:車両と速度が与えられ、そのax-ay図を計算します。 GG図は、車両の設計とパラメーターの探索における有用な手法です。
これは最適化の問題として解決されます。特定の横方向の加速については、最小/最大実行可能な縦方向の加速を見つけます。
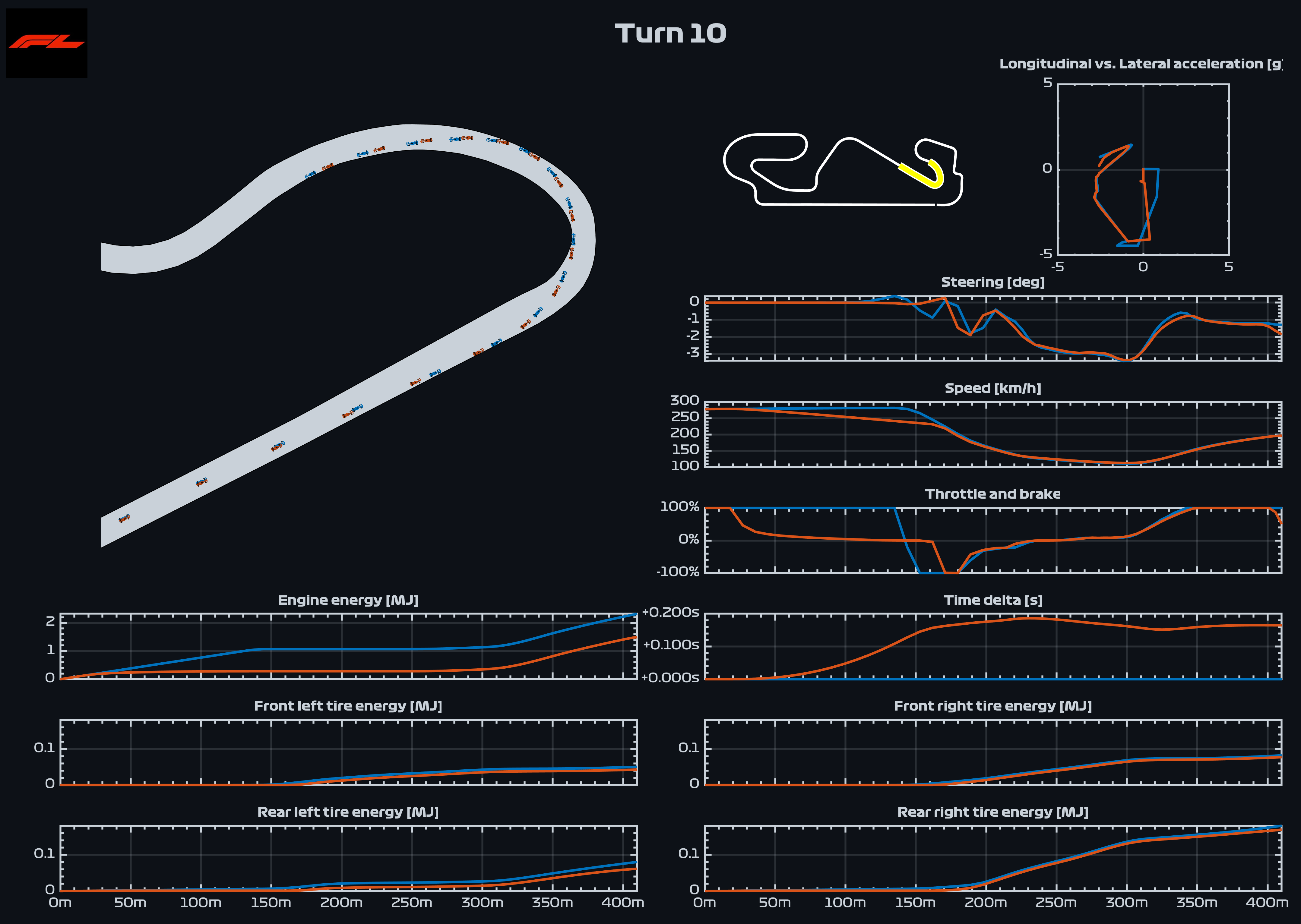
最適なラプティムシミュレーション:車両と回路が与えられ、ラプティムを最小限に抑える最適なコントロールを計算します。
この問題は、一次コロケーション法である台形ルールを使用して解決され、高次の方法をまもなく実装することが計画されています。 NLPはIPOPTとCPPADを使用して解決され、パフォーマンスが向上します(Catirunya周辺のラップタイムは、約1分で500ポイントで取得できます)。
これは、準定常状態のシミュレーションではありません。このモデルは、定常状態の仮定なしに動的方程式のように完全に一時的な状態を解決します。
ソフトウェアのコアはC ++ライブラリで、Python APIで使用できます。完全なドキュメントはまだ利用できませんが、いくつかの例は例/Pythonにあります。最速ラップは非常に効率的で、1分未満で完全な最適なラップを計算できます。
コードは2つの車モデルを実装しています。
回路は、Google Earthから作成されたパスからモデル化されています。たとえば、Catalunyaの正しいトラック制限は、このリポジトリ(データベース/Google_Earth/Catalunya_right.kml)に含まれています。次に、本明細書に含まれるツールで前処理され、参照ライン、その曲率、および左/右のトラック制限(データベース/catalunya_discrete.xml)までの距離を抽出するためのツールで前処理されます。
Fastest-Lapでは、いくつかのオープンソースライブラリを使用しています。
事前コンパイルされたバイナリは、リリースごとにダウンロードできます。
ダウンロードして解凍します。 zipフォルダーの内容は次のとおりです。
loadlibrary()このディレクトリに使用されます。PYTHONPATHにあることを確認してくださいこのプロジェクトでは、Cmakeを使用してソースコードを構築し、バイナリを作成します。
Cmakeプロジェクトをコンパイル$FASTESTLAPための正規の手順は次のとおりです。
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
cmakeで利用できるオプションは次のとおりです。
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
この段階では、Cmakeはすべてのサードパーティの依存関係をダウンロードしてインストールします。
make
ctest --verbose
make install
Dockerビルド環境が提供され、共有ライブラリをコンパイルし、Pythonバインディングを生成するために使用できます。
sh ./src/scripts/linux/docker_compile.sh最新の最速ラップオンラインドキュメントをお読みください
[1] Tremlett、AJ、およびDJN Limebeer。 「フォーミュラワン車の最適なタイヤの使用。」車両システムダイナミクス54.10(2016):1448-1473。
[2]ロット、ロベルト、ニコラ・ダル・ビアンコ。 「レーシングゴーカートのラップタイム最適化。」車両システムダイナミクス54.2(2016):210-230。
[3] Dal Bianco、Nicola、Roberto Lot、Marco Gadola。 「GP2レースカーの最小時間最適制御シミュレーション。」機械エンジニア機関の議事録、パートD:Journal of Automobile Engineering 232.9(2018):1180-1195。
[4]ロット、ロベルト、マッテオ・マサロ。 「道路車両のマルチボディモデリングに対する象徴的なアプローチ。」 International Journal of Applied Mechanics 9.05(2017):1750068。
[5]ケリー、ダニエルP.、ロビンS.シャープ。 「レースカーの最適な制御:理想的なドライバーをエミュレートする数値的方法。」車両システムダイナミクス48.12(2010):1461-1474。
[6]ピカニニ、マティア。 「取り扱いの制限における自動運転車のパス計画と制御」
[7] Casanova、D。
[8] Perantoni、G。etal。 「可変パラメーターを備えたフォーミュラワン車の最適な制御」


