fastest lap
v0.5
A mais rápida é um simulador de dinâmica do veículo. Pode ser usado para entender a dinâmica do veículo, para aprender sobre técnicas de direção, projetar protótipos de carro ou apenas por diversão!
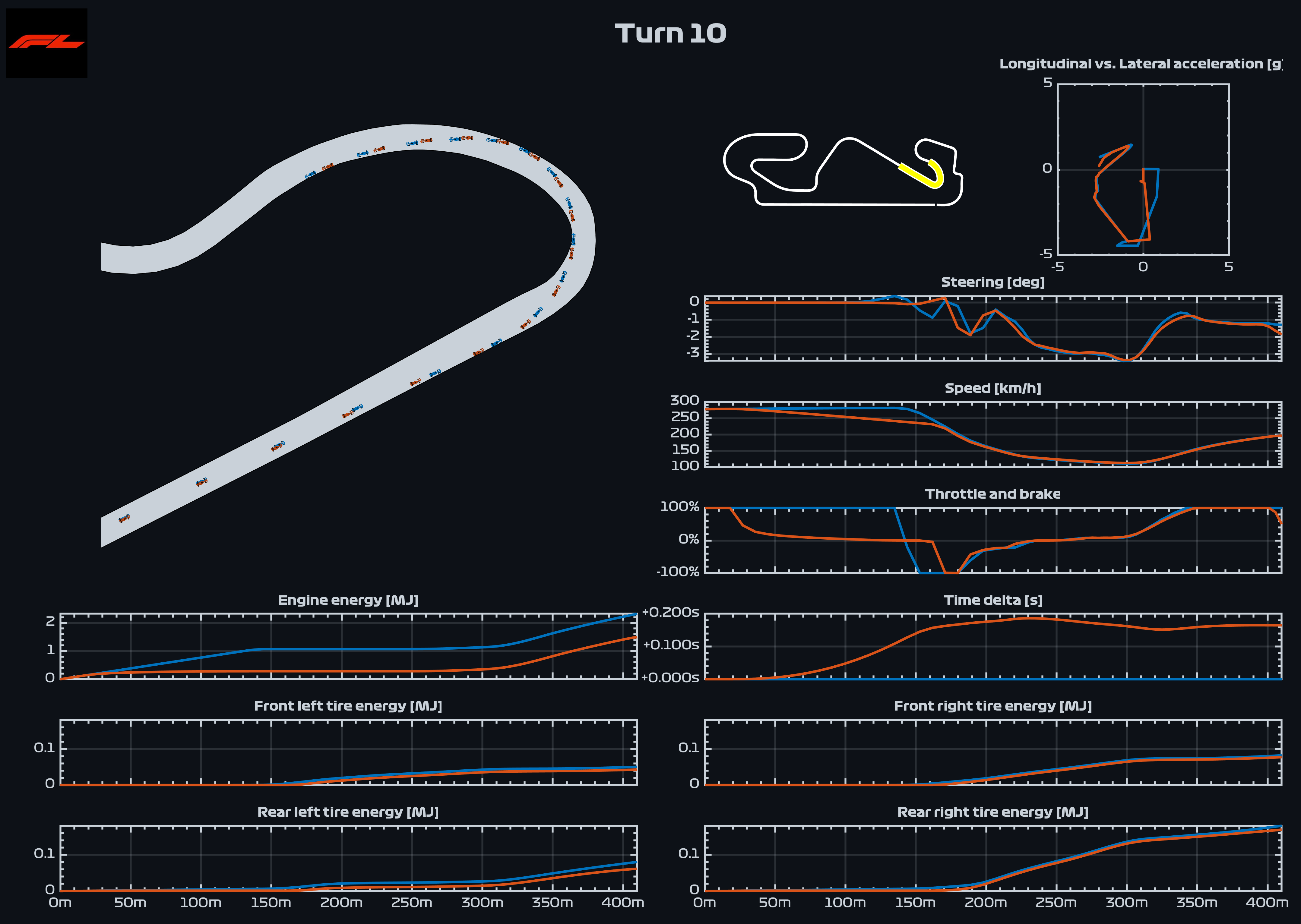
Diagrama numérico de GG: dado um veículo e uma velocidade, para calcular seu diagrama de AX-AY. O diagrama GG é uma técnica útil no design do veículo e na exploração de parâmetros.
Isso é resolvido como um problema de otimização: para uma dada aceleração lateral, encontre a aceleração longitudinal mínima/máxima viável.
Simulação ideal da lappime: dado um veículo e um circuito, para calcular os controles ideais que minimizam a lappime.
Esse problema é resolvido usando um método de colocação de primeira ordem, a regra trapezoidal, com métodos de ordem superior planejados para serem implementados em breve. O PNL é resolvido usando o IPOPT e o CPPAD para melhorar seu desempenho (um tempo de volta ao redor do circuito de Catalunha pode ser obtido com 500 pontos em aproximadamente 1 minuto).
Esta não é uma simulação quase-estadual. O modelo resolve os estados totalmente transitórios, como nas equações dinâmicas sem suposições de estado estacionário.
O núcleo do software é uma biblioteca C ++, que pode ser usada através de uma API Python. A documentação completa ainda não está disponível, mas alguns exemplos podem ser encontrados em exemplos/python. O mais rápido, é muito eficiente, sendo capaz de calcular uma volta ideal completa em menos de 1 minuto.
O código implementa dois modelos de carros:
Os circuitos são modelados a partir de caminhos criados a partir do Google Earth, por exemplo, o limite certo da Catalunya está incluído neste repositório (banco de dados/google_earth/catalunya_right.kml). Os circuitos são então pré -processados com uma ferramenta incluída aqui para extrair uma linha de referência, sua curvatura e a distância aos limites da trilha esquerda/direita (banco de dados/catalunya_discrete.xml).
O mais rápido-lap usa várias bibliotecas de código aberto:
Os binários pré -compilados estão disponíveis para download para cada lançamento.
Download e descompactação. O conteúdo da pasta ZIP são:
loadlibrary() para este diretório.PYTHONPATHEste projeto usa o CMake para construir o código -fonte e produzir os binários.
As etapas canônicas para compilar um projeto CMake são: (Suponha que $FASTESTLAP seja o nível superior do código -fonte.)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
As opções disponíveis para CMake são:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
Nesta fase, o CMake baixará e instalará todas as dependências de terceiros.
make
ctest --verbose
make install
Um ambiente de construção do Docker é fornecido e pode ser usado para compilar a biblioteca compartilhada e gerar as ligações do Python.
sh ./src/scripts/linux/docker_compile.shLeia a mais recente documentação online mais rápida
[1] Tremlett, AJ e Djn Limebeer. "Uso ideal para pneus para um carro da Fórmula 1". Dinâmica do sistema de veículos 54.10 (2016): 1448-1473.
[2] Lote, Roberto e Nicola Dal Bianco. "Otimização do tempo de volta de uma kart de corrida". Dinâmica do sistema de veículos 54.2 (2016): 210-230.
[3] Dal Bianco, Nicola, Roberto Lot e Marco Gadola. "Tempo mínimo simulação de controle ideal de um carro de corrida GP2". Anais da Instituição de Engenheiros Mecânicos, Parte D: Journal of Automobile Engineering 232.9 (2018): 1180-1195.
[4] Lote, Roberto e Matteo Massaro. "Uma abordagem simbólica para a modelagem multicorpo de veículos rodoviários". International Journal of Applied Mechanics 9.05 (2017): 1750068.
[5] Kelly, Daniel P. e Robin S. Sharp. "Controle temporal do carro de corrida: um método numérico para imitar o motorista ideal". Dinâmica do sistema de veículos 48.12 (2010): 1461-1474.
[6] Piccinini, Mattia. "Planejamento de caminho e controle de veículos autônomos nos limites do manuseio"
[7] Casanova, D. "No tempo mínimo de manobra de veículo: a volta ideal teórica"
[8] Peantoni, G. et al. "Controle ideal para um carro da Fórmula 1 com parâmetros variáveis"


