fastest lap
v0.5
Le plus rapide est un simulateur de dynamique de véhicule. Il peut être utilisé pour comprendre la dynamique des véhicules, pour découvrir les techniques de conduite, pour concevoir des prototypes de voitures, ou tout simplement pour le plaisir!
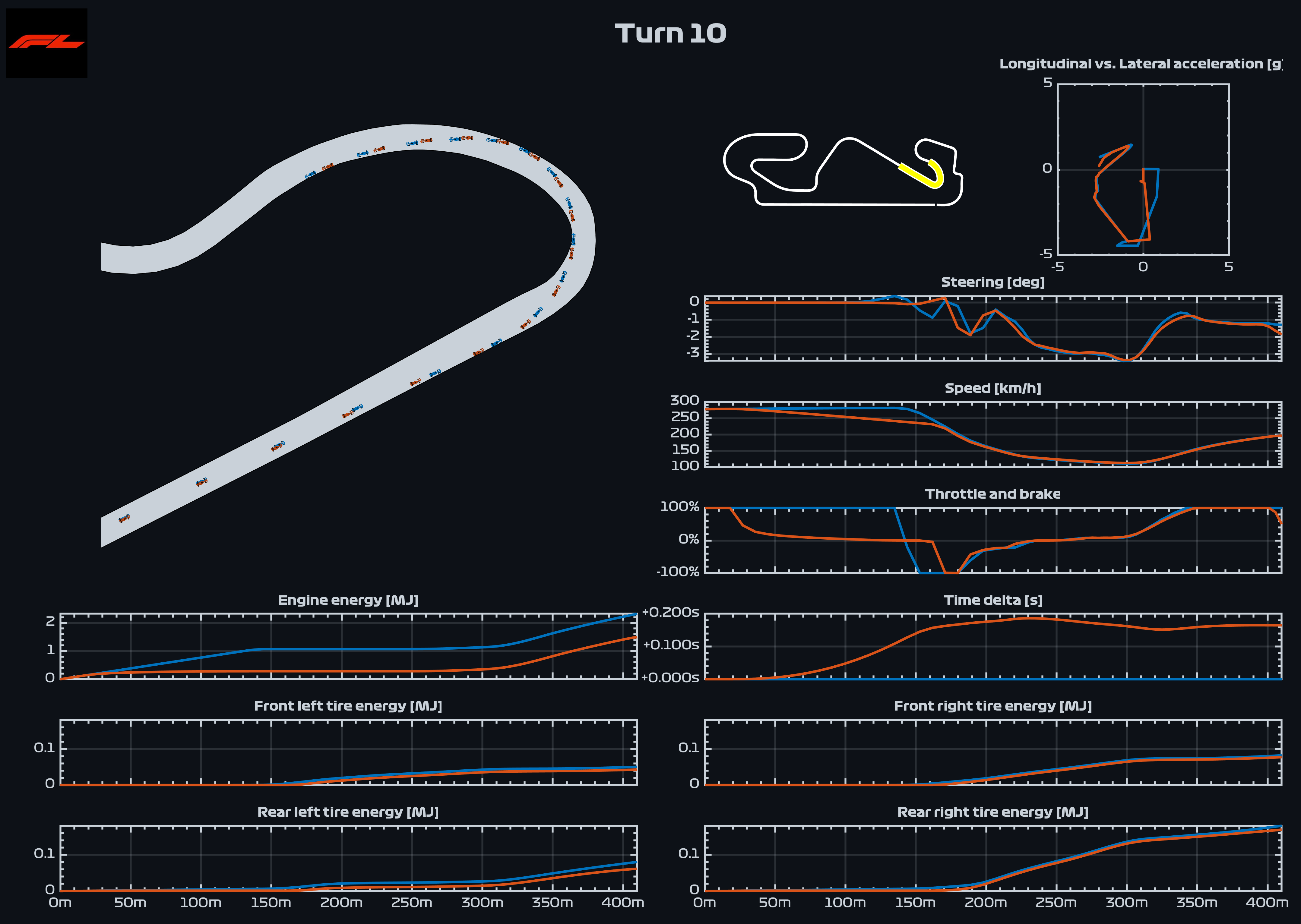
Diagramme GG numérique: étant donné un véhicule et une vitesse, pour calculer son diagramme de hache. Le diagramme GG est une technique utile dans la conception des véhicules et l'exploration des paramètres.
Ceci est résolu comme un problème d'optimisation: pour une accélération latérale donnée, trouvez l'accélération longitudinale minimum / maximale possible.
Simulation optimale de l'ordinateur portable: étant donné un véhicule et un circuit, pour calculer les contrôles optimaux qui minimisent l'ordinateur portable.
Ce problème est résolu à l'aide d'une méthode de collocation de premier ordre, la règle trapézoïdale, avec des méthodes d'ordre supérieur qui devraient être mises en œuvre bientôt. La PNL est résolue à l'aide d'IPOPT, et CPPAD pour améliorer ses performances (un temps au tournée autour du circuit de catalogue peut être obtenu avec 500 points en environ 1 minute).
Ce n'est pas une simulation quasi-state. Le modèle résout les états entièrement transitoires comme dans les équations dynamiques sans hypothèses en régime permanent.
Le noyau du logiciel est une bibliothèque C ++, qui peut être utilisée via une API Python. La documentation complète n'est pas encore disponible, mais certains exemples peuvent être trouvés dans des exemples / Python. Le plus rapide est très efficace, pouvoir calculer un tour optimal complet en moins de 1 minute.
Le code implémente deux modèles de voitures:
Les circuits sont modélisés à partir de chemins créés à partir de Google Earth, par exemple, la limite de droite de Catalogya est incluse dans ce référentiel (Database / Google_Earth / Catalunya_Right.KML). Les circuits sont ensuite prétraités avec un outil inclus ici pour extraire une ligne de référence, sa courbure et la distance aux limites de piste gauche / droite (base de données / catalogne_discrete.xml).
Fastrest-Lap utilise plusieurs bibliothèques open source:
Des binaires précompilés sont disponibles en téléchargement pour chaque version.
Télécharger et dézip. Le contenu du dossier zip est:
loadlibrary() à ce répertoire.PYTHONPATHCe projet utilise CMake pour construire le code source et produire les binaires.
Les étapes canoniques pour compiler un projet CMake sont: (Supposons que $FASTESTLAP est le niveau supérieur du code source.)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
Les options disponibles pour Cmake sont:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
À ce stade, CMake téléchargera et installera toutes les dépendances tierces.
make
ctest --verbose
make install
Un environnement de construction Docker est fourni et peut être utilisé pour compiler la bibliothèque partagée et générer les liaisons Python.
sh ./src/scripts/linux/docker_compile.shLisez la dernière documentation en ligne la plus rapide
[1] Tremlett, AJ et Djn Limebeer. "Utilisation optimale des pneus pour une voiture de Formule 1." Dynamique du système de véhicules 54.10 (2016): 1448-1473.
[2] Lot, Roberto et Nicola Dal Bianco. "Optimisation du temps au tour d'un kart de course." Dynamique du système de véhicules 54.2 (2016): 210-230.
[3] Dal Bianco, Nicola, Roberto Lot et Marco Gadola. "Minimum Time Optimal Control Simulation d'une voiture de course GP2." Actes de l'Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering 232.9 (2018): 1180-1195.
[4] Lot, Roberto et Matteo Massaro. "Une approche symbolique de la modélisation multibody des véhicules routiers." International Journal of Applied Mechanics 9.05 (2017): 1750068.
[5] Kelly, Daniel P. et Robin S. Sharp. "Contrôle optimal de la voiture de course: une méthode numérique pour imiter le conducteur idéal." Dynamique du système des véhicules 48.12 (2010): 1461-1474.
[6] Piccinini, Mattia. "Planification et contrôle des véhicules autonomes aux limites de la manipulation"
[7] Casanova, D. "Au minimum de manœuvre de véhicules: le tour théorique optimal"
[8] Perantoni, G. et al. "Contrôle optimal pour une voiture de Formule 1 avec des paramètres variables"


