fastest lap
v0.5
أسرع لفة هي محاكاة ديناميات السيارة. يمكن استخدامه لفهم ديناميات المركبات ، للتعرف على تقنيات القيادة ، لتصميم نماذج أولية للسيارات ، أو للمتعة فقط!
رسم تخطيطي GG العددي: إعطاء مركبة ، وسرعة ، لحساب مخططها الفأس. يعد مخطط GG تقنية مفيدة في تصميم المركبات واستكشاف المعلمات.
يتم حل هذا كمشكلة تحسين: لتسارع جانبي معين ، ابحث عن الحد الأدنى/الحد الأقصى للتسارع الطولي الممكن.
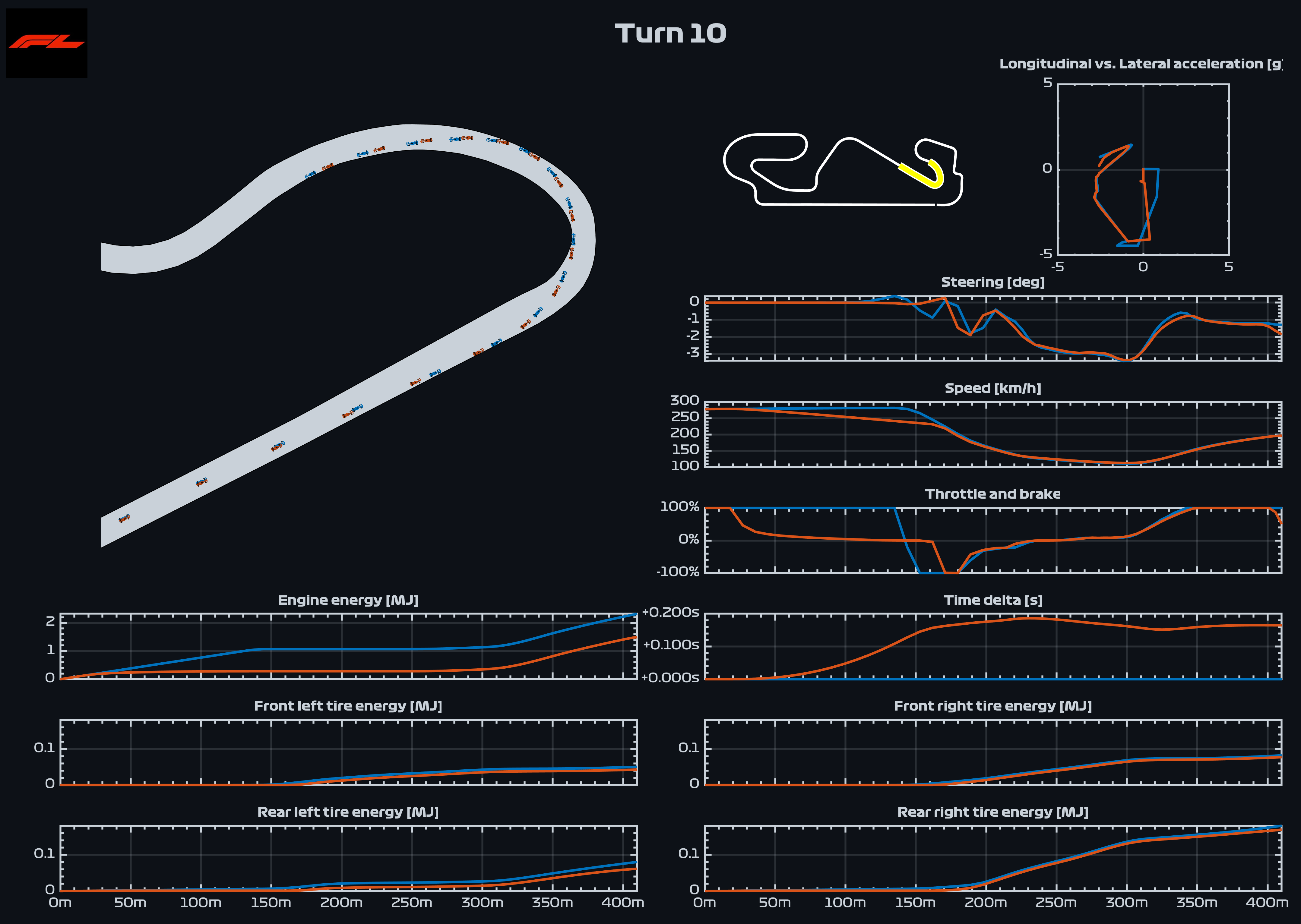
محاكاة المحمول الأمثل: بالنظر إلى مركبة ، ودائرة ، لحساب عناصر التحكم المثلى التي تقلل من وقت الكمبيوتر.
يتم حل هذه المشكلة باستخدام طريقة تجميع من الدرجة الأولى ، القاعدة شبه المنحرف ، مع وجود أساليب ذات ترتيب أعلى يتم تنفيذها قريبًا. يتم حل NLP باستخدام IPOPT ، و CPPAD لتعزيز أدائها (يمكن الحصول على وقت في الحفة حول حلبة DE CATALUNYA مع 500 نقطة في حوالي دقيقة واحدة).
هذه ليست محاكاة شبه ثابتة. يحل النموذج الحالات العابرة بالكامل كما هو الحال في المعادلات الديناميكية دون افتراضات الحالة المستقرة.
جوهر البرنامج هو مكتبة C ++ ، يمكن استخدامها من خلال API Python. الوثائق الكاملة غير متوفرة بعد ولكن يمكن العثور على بعض الأمثلة في أمثلة/بيثون. أسرع لفة فعالة للغاية ، حيث تكون قادرة على حساب لفة مثالية كاملة في أقل من دقيقة واحدة.
الرمز ينفذ نموذجين للسيارة:
تم تصميم الدوائر من المسارات التي تم إنشاؤها من Google Earth ، على سبيل المثال ، يتم تضمين حد المسار الصحيح لـ Catalunya في هذا المستودع (قاعدة البيانات/Google_Earth/Catalunya_Right.kml). ثم يتم تجميع الدوائر مسبقًا باستخدام أداة مدرجة هنا لاستخراج خط مرجعي ، وانحناءه ، والمسافة إلى حدود المسار الأيمن/اليمين (قاعدة البيانات/Catalunya_discrete.xml).
يستخدم أسرع لفة العديد من المكتبات مفتوحة المصدر:
الثنائيات المسبقة متاحة للتنزيل لكل إصدار.
تنزيل وفك الضغط. محتويات المجلد الرمز البريدي هي:
loadlibrary() إلى هذا الدليل.PYTHONPATHيستخدم هذا المشروع Cmake لإنشاء رمز المصدر وإنتاج الثنائيات.
الخطوات الكنسية لتجميع مشروع CMAKE هي: (افترض $FASTESTLAP هو المستوى الأعلى من الكود المصدر.)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
الخيارات المتاحة لـ CMake هي:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
في هذه المرحلة ، ستقوم CMake بتنزيل وتثبيت جميع تبعيات الطرف الثالث.
make
ctest --verbose
make install
يتم توفير بيئة بناء Docker ويمكن استخدامها لتجميع المكتبة المشتركة وإنشاء روابط Python.
sh ./src/scripts/linux/docker_compile.shاقرأ أحدث وثائق عبر الإنترنت
[1] Tremlett ، AJ ، و DJN Limeber. "استخدام الإطارات الأمثل لسيارة الفورمولا واحد." ديناميات نظام المركبات 54.10 (2016): 1448-1473.
[2] لوت ، روبرتو ، ونيكولا دال بيانكو. "وقت اللفة لتحسين سباق السباق." ديناميات نظام المركبات 54.2 (2016): 210-230.
[3] دال بيانكو ، نيكولا ، روبرتو لوت ، وماركو جادولا. "الحد الأدنى للوقت المحاكاة السيطرة الأمثل لسيارة سباق GP2." وقائع مؤسسة المهندسين الميكانيكيين ، الجزء D: مجلة هندسة السيارات 232.9 (2018): 1180-1195.
[4] لوت ، روبرتو ، وماتيو ماسارو. "نهج رمزي لنمذجة الأجسام المتعددة للمركبات على الطرق." المجلة الدولية للميكانيكا التطبيقية 9.05 (2017): 1750068.
[5] كيلي ، دانييل ب. ، وروبن س. شارب. "السيطرة على الوقت الأمثل لسيارة السباق: طريقة عددية لمحاكاة السائق المثالي." ديناميات نظام المركبات 48.12 (2010): 1461-1474.
[6] بيكينيني ، ماتيا. "تخطيط المسار والسيطرة على المركبات ذاتية القيادة على حدود المناولة"
[7] كازانوفا ، د.
[8] بيرانتوني ، ج. وآخرون. "التحكم الأمثل لسيارة الفورمولا واحد مع معلمات متغيرة"


