fastest lap
v0.5
最快的圈是车辆动力学模拟器。它可以用来了解车辆动态,了解驾驶技术,设计汽车原型或只是为了娱乐!
数值GG图:给定车辆和速度以计算其轴图。 GG图是车辆设计和参数探索的有用技术。
这是作为优化问题解决的:对于给定的侧向加速度,找到最小/最大可行的纵向加速度。
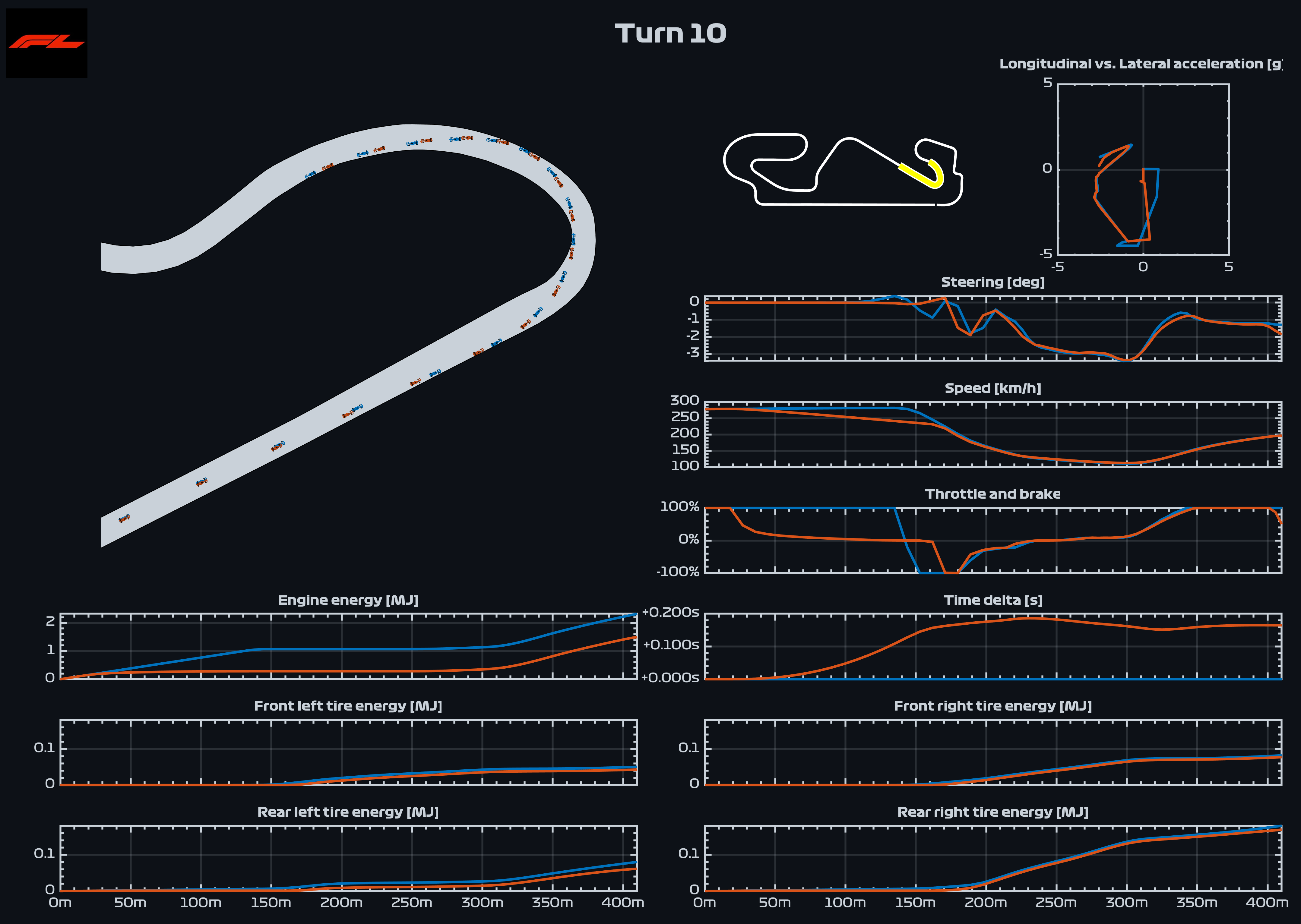
最佳的调理模拟:给定车辆和电路,以计算最小化的最佳控制。
使用一阶置式方法(梯形规则)解决此问题,并计划尽快实施高阶方法。使用IPOPT解决NLP,并提高CPPAD(CPPAD)(在大约1分钟内可以用500点获得CATALUNYA围绕的圈速)。
这不是准稳态模拟。该模型像没有稳态假设的动态方程一样求解完全瞬态状态。
该软件的核心是C ++库,可以通过Python API使用。尚不可用的完整文档,但可以在示例/python中找到一些示例。最快的圈非常有效,能够在不到1分钟的时间内计算完整的最佳圈。
该代码实现了两个汽车型号:
电路是根据由Google Earth创建的路径建模的,例如,此存储库中包含Catalunya的正确轨道极限(数据库/google_earth/catalunya_right.kml)。然后,用本文包含的工具对电路进行预处理,以提取参考线,其曲率以及与左/右轨道极限(数据库/catalunya_discrete.xml)的距离。
最快的圈使用几个开源库:
每个版本都可以下载预编译的二进制文件。
下载并解压缩。拉链文件夹的内容是:
loadlibrary()到此目录。PYTHONPATH上该项目使用CMAKE构建源代码并生产二进制文件。
编译CMAKE项目的规范步骤是:(假设$FASTESTLAP是源代码的顶级。)
mkdir ${FASTESTLAP}/build
cd ${FASTESTLAP}/build && cmake ..
可用于CMAKE的选项是:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
在此阶段,CMAKE将下载并安装所有第三方依赖关系。
make
ctest --verbose
make install
提供了Docker构建环境,可用于编译共享库并生成Python绑定。
sh ./src/scripts/linux/docker_compile.sh阅读最新的最快的在线文档
[1] Tremlett,AJ和DJN Limebeer。 “一级方程式赛车的最佳轮胎使用情况。”车辆系统动力学54.10(2016):1448-1473。
[2] Lot,Roberto和Nicola Dal Bianco。 “赛车卡丁车的单圈时间优化。”车辆系统动力学54.2(2016):210-230。
[3] Dal Bianco,Nicola,Roberto Lot和Marco Gadola。 “ GP2赛车的最低时间最佳控制模拟。”机械工程师学会论文集,第D部分:汽车工程杂志232.9(2018):1180-1195。
[4] Lot,Roberto和Matteo Massaro。 “道路车辆多体模型的象征性方法。”国际应用机械杂志9.05(2017):1750068。
[5] Kelly,Daniel P.和Robin S. Sharp。 “赛车的时间最佳控制:一种模拟理想驱动程序的数值方法。”车辆系统动力学48.12(2010):1461-1474。
[6] Piccinini,Mattia。 “在处理范围内对自动驾驶车辆的路径规划和控制”
[7] Casanova,D。
[8] Perantoni,G。等。 “具有可变参数的一级方程式汽车的最佳控制”


