rosbag compare
v0.1.0
比较rosbags之间的主题内容
假设您的文件夹中有一堆Rosbags,您不知道所有这些Rosbags是否具有相同的主题。 rosbag-compare将:
可以从PYPI安装rosbag-compare :
$ pip install rosbag-compare rosbag-compare既可以用作命令行应用程序,也可以用作Python代码。
rosbag-compare的基本用途是将其称为包含Rosbags的文件夹的路径。这将简单地生成一个JSON文件,其中包含topics_<name-of-bagfolder>.json中比较的摘要。
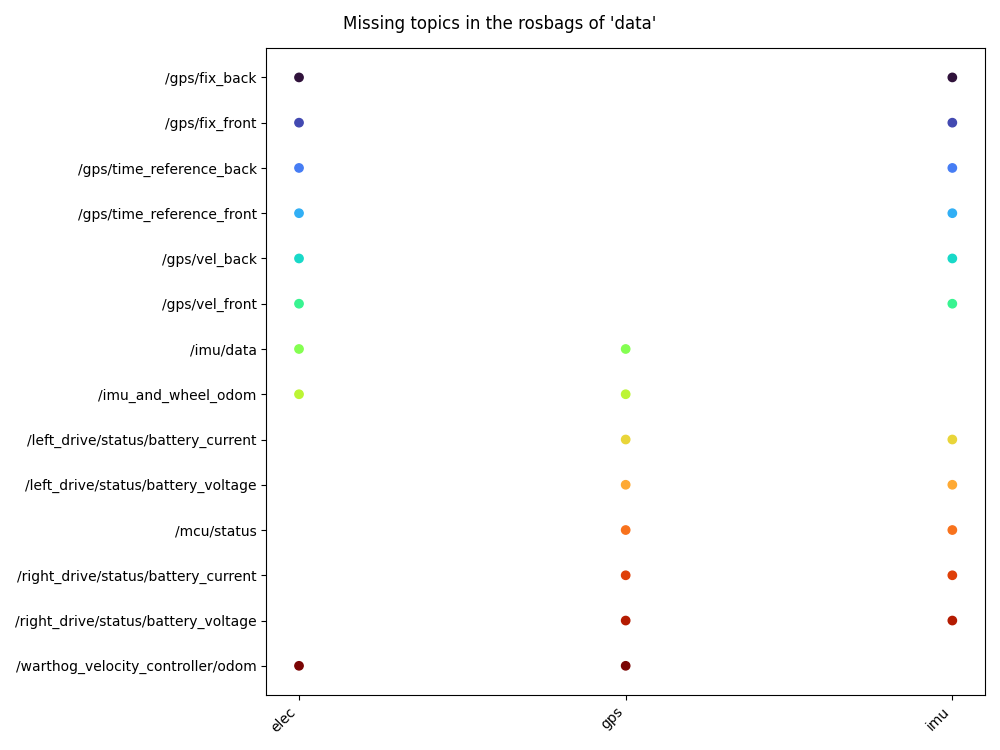
$ rosbag-compare -b /path/to/folder/with/rosbags您还可以生成一个数字,该数字将显示每个ROSBAG中缺少哪些主题,并使用--plot/-p标志。当您想找出实验的所有Rosbags是否包含您感兴趣的主题时,这个数字会有所帮助。
$ rosbag-compare -b /path/to/folder/with/rosbags -p您也可以将rosbag-compare直接致电到Python代码:
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path 拉力请求是欢迎的,请不要犹豫开放问题
可以使用PIP安装开发要求:
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt 该项目是根据MIT许可证获得许可的


