rosbag compare
v0.1.0
Compare o conteúdo do tópico entre rosbags
Digamos que você tenha um monte de rosas dentro de uma pasta e não sabe se todos esses rosbags têm ou não os mesmos tópicos. rosbag-compare Will:
rosbag-compare pode ser instalado a partir de Pypi:
$ pip install rosbag-compare rosbag-compare pode ser usado como um aplicativo de linha de comando e no código Python.
Um uso básico do rosbag-compare é simplesmente chamá-lo com o caminho da pasta que contém rosbags. Isso simplesmente gerará um arquivo JSON com um resumo da comparação em topics_<name-of-bagfolder>.json .
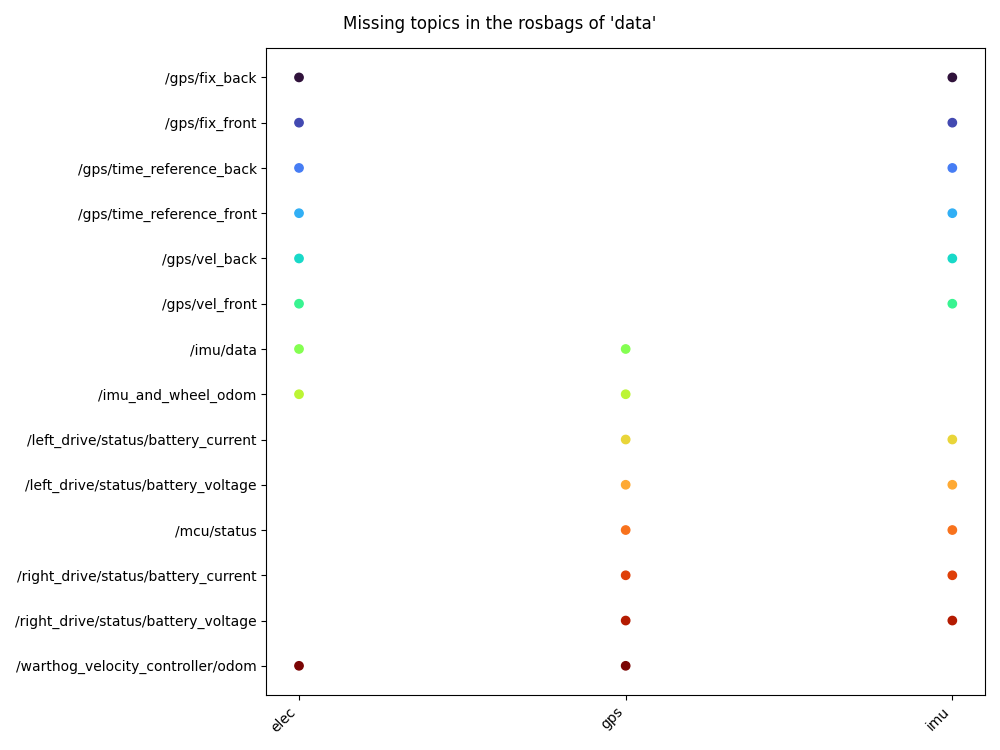
$ rosbag-compare -b /path/to/folder/with/rosbags Você também pode gerar uma figura que mostrará quais tópicos estão faltando em cada rosbag com o sinalizador --plot/-p . Este número ajuda quando você deseja descobrir se todos os rosbags do seu experimento contêm os tópicos que são do seu interesse.
$ rosbag-compare -b /path/to/folder/with/rosbags -p Você também pode ligar para rosbag-compare diretamente para o seu código Python:
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path Os pedidos de tração são bem -vindos e não hesite em abrir problemas
Os requisitos de desenvolvimento podem ser instalados usando PIP:
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt Este projeto está licenciado sob uma licença do MIT


