rosbag compare
v0.1.0
เปรียบเทียบเนื้อหาหัวข้อระหว่าง Rosbags
สมมติว่าคุณมีถุง rosbags อยู่ในโฟลเดอร์และคุณไม่รู้ว่า rosbags เหล่านั้นทั้งหมดมีหัวข้อเดียวกันหรือไม่ rosbag-compare จะ:
สามารถติดตั้ง rosbag-compare ได้จาก PYPI:
$ pip install rosbag-compare rosbag-compare สามารถใช้ทั้งแอปพลิเคชันบรรทัดคำสั่งและในรหัส Python
การใช้งานขั้นพื้นฐานของ rosbag-compare คือการเรียกมันด้วยเส้นทางของโฟลเดอร์ที่มี Rosbags สิ่งนี้จะสร้างไฟล์ JSON พร้อมบทสรุปของการเปรียบเทียบใน topics_<name-of-bagfolder>.json
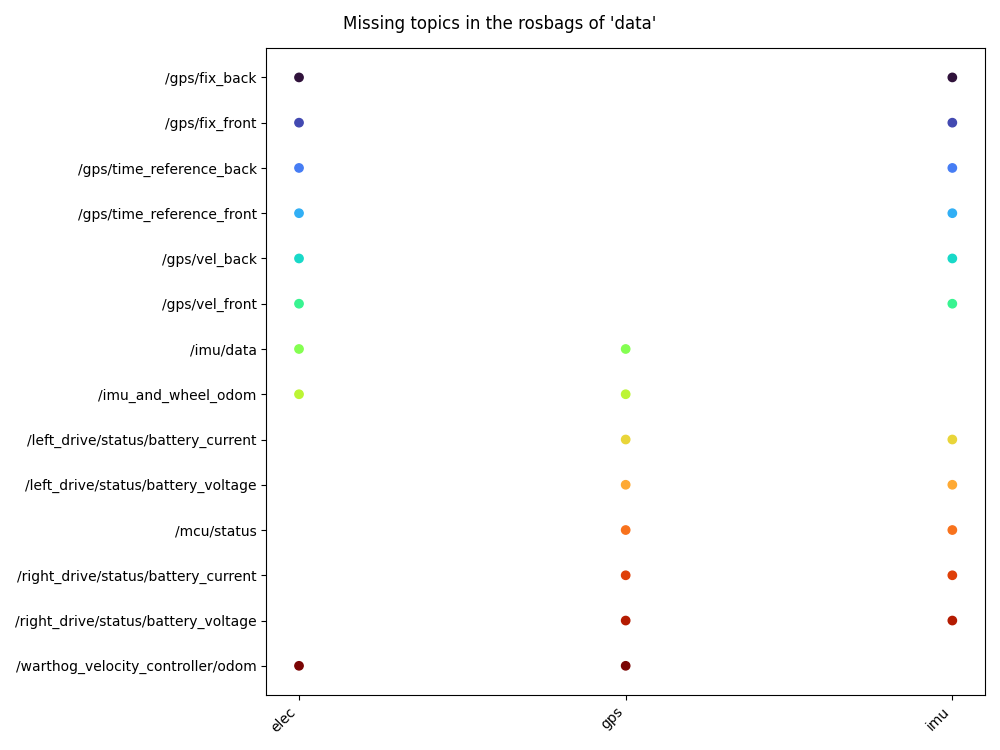
$ rosbag-compare -b /path/to/folder/with/rosbags นอกจากนี้คุณยังสามารถสร้างตัวเลขที่จะแสดงหัวข้อที่หายไปในแต่ละ Rosbag ด้วยธง --plot/-p รูปนี้ช่วยเมื่อคุณต้องการทราบว่า rosbags ทั้งหมดของการทดลองของคุณมีหัวข้อที่เป็นที่สนใจของคุณหรือไม่
$ rosbag-compare -b /path/to/folder/with/rosbags -p คุณยังสามารถโทรหา rosbag-compare ได้โดยตรงในรหัส Python ของคุณ:
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path ยินดีต้อนรับคำขอดึงและอย่าลังเลที่จะเปิดปัญหา
ข้อกำหนดการพัฒนาสามารถติดตั้งได้โดยใช้ PIP:
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt โครงการนี้ได้รับใบอนุญาตภายใต้ใบอนุญาต MIT


