rosbag compare
v0.1.0
Сравните содержание темы между Rosbags
Скажем, у вас есть куча росбаг в папке, и вы не знаете, есть ли у всех этих росбаг одни и те же темы. rosbag-compare будет:
rosbag-compare может быть установлен из PYPI:
$ pip install rosbag-compare rosbag-compare может использоваться как в качестве приложения командной строки, так и в коде Python.
Основное использование rosbag-compare просто назвать его путем папки, которая содержит ROSBAGS. Это просто генерирует файл JSON с кратким изложением сравнения по topics_<name-of-bagfolder>.json .
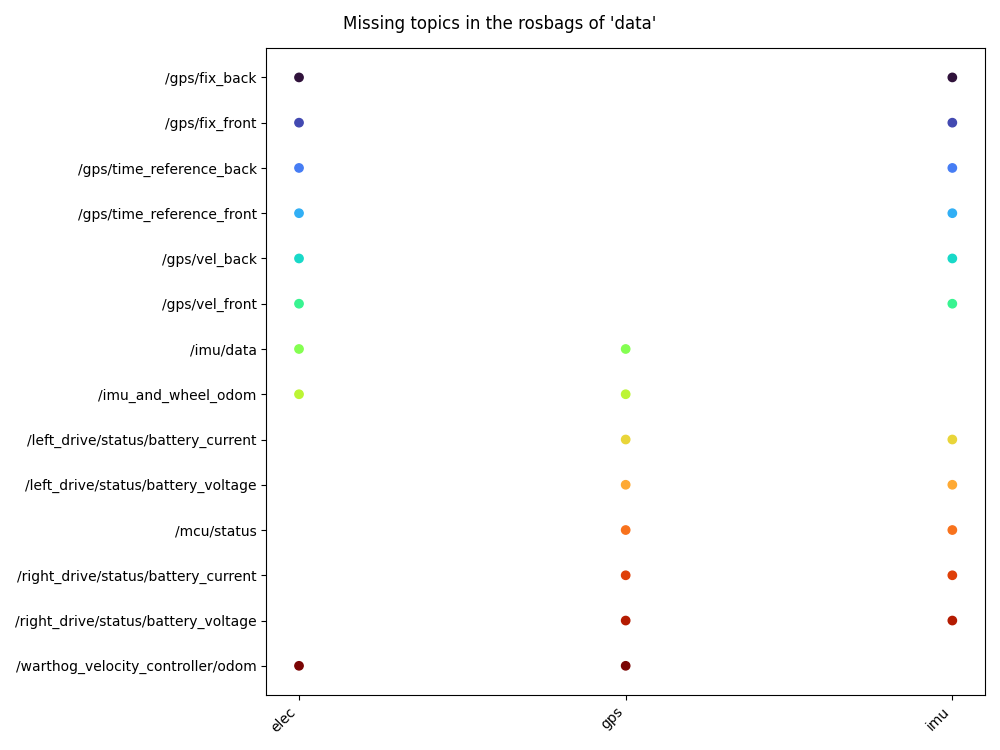
$ rosbag-compare -b /path/to/folder/with/rosbags Вы также можете генерировать фигуру, которая покажет, какие темы отсутствуют в каждом Rosbag с флагом --plot/-p . Эта цифра помогает, когда вы хотите выяснить, содержат ли все росборы вашего эксперимента те темы, которые представляют ваш интерес.
$ rosbag-compare -b /path/to/folder/with/rosbags -p Вы также можете позвонить в rosbag-compare непосредственно в свой код Python:
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path Запросы на тягу приветствуются и не стесняйтесь открывать проблемы
Требования к разработке могут быть установлены с использованием PIP:
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt Этот проект лицензирован по лицензии MIT


