rosbag compare
v0.1.0
Vergleichen Sie den Themeninhalt zwischen Rosbags
Angenommen, Sie haben eine Reihe von Rosbags in einem Ordner und Sie wissen nicht, ob alle diese Rosbags die gleichen Themen haben oder nicht. rosbag-compare wird:
rosbag-compare kann von PYPI installiert werden:
$ pip install rosbag-compare rosbag-compare kann sowohl als Befehlszeilenanwendung als auch im Python-Code verwendet werden.
Eine grundlegende Verwendung von rosbag-compare besteht darin, es einfach mit dem Pfad des Ordners zu nennen, der Rosbags enthält. Dies generiert einfach eine JSON-Datei mit einer Zusammenfassung des Vergleichs in topics_<name-of-bagfolder>.json .
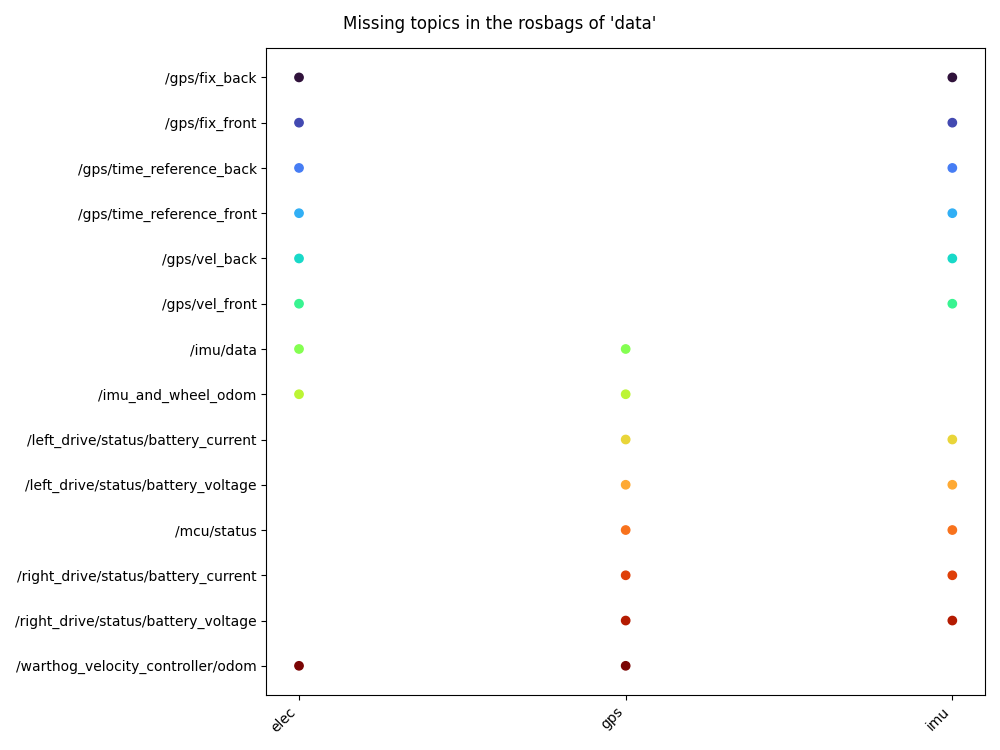
$ rosbag-compare -b /path/to/folder/with/rosbags Sie können auch eine Figur erstellen, die zeigt, welche Themen in jedem Rosbag mit dem Flag --plot/-p fehlen. Diese Zahl hilft, wenn Sie herausfinden möchten, ob alle Rosbags Ihres Experiments die von Ihrem Interesse sind.
$ rosbag-compare -b /path/to/folder/with/rosbags -p Sie können rosbag-compare auch direkt in Ihren Python-Code anrufen:
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path Anfragen sind willkommen und zögern Sie nicht, Probleme zu öffnen
Entwicklungsanforderungen können mit PIP installiert werden:
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt Dieses Projekt ist unter einer MIT -Lizenz lizenziert


