rosbag compare
v0.1.0
ロスバッグ間のトピックコンテンツを比較します
フォルダー内にたくさんのロスバッグがあり、それらのロスバッグがすべて同じトピックを持っているかどうかわからないとします。 rosbag-compare次のとおりです。
rosbag-compare Pypiからインストールできます。
$ pip install rosbag-compare rosbag-compareコマンドラインアプリケーションとPythonコードの両方として使用できます。
rosbag-compareの基本的な使用は、ロスバッグを含むフォルダーのパスで単純に呼び出すことです。これにより、 topics_<name-of-bagfolder>.jsonの比較の要約を含むJSONファイルが生成されます。
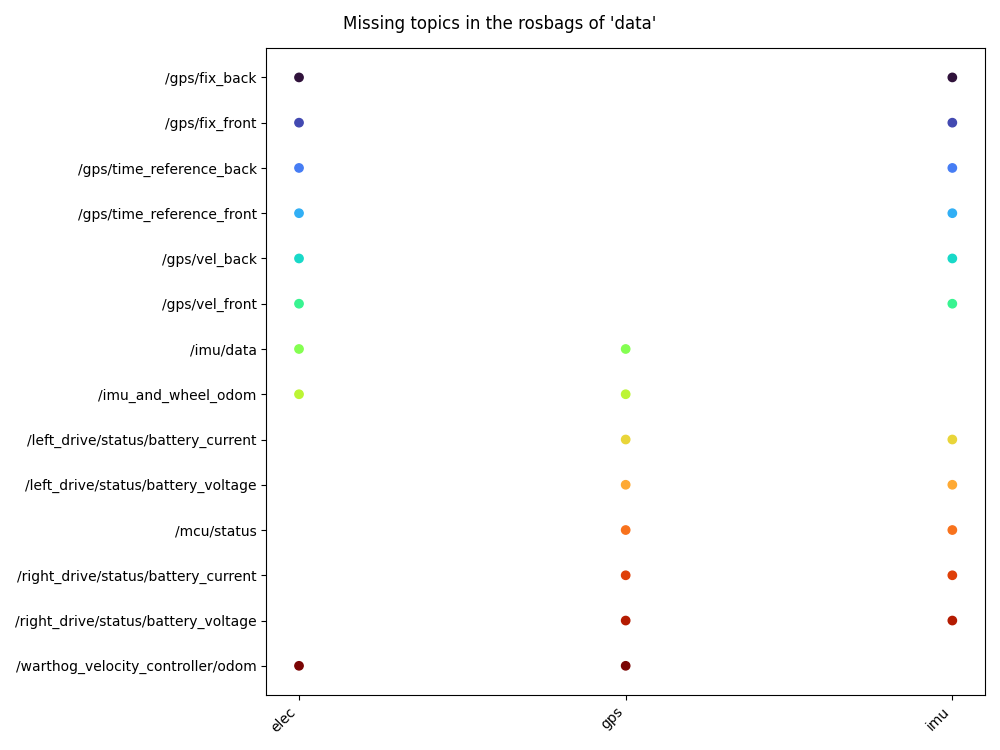
$ rosbag-compare -b /path/to/folder/with/rosbagsまた、 --plot/-pフラグを使用して、各ロスバッグに欠落しているトピックを示す図を生成することもできます。この数字は、実験のすべてのロスバッグにあなたの興味のあるトピックが含まれているかどうかを知りたいときに役立ちます。
$ rosbag-compare -b /path/to/folder/with/rosbags -prosbag-compare Pythonコードに直接呼び出すこともできます。
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path プルリクエストは大歓迎であり、問題を開くことをためらわないでください
開発要件は、PIPを使用してインストールできます。
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt このプロジェクトは、MITライセンスの下でライセンスされています


