rosbag compare
v0.1.0
Rosbags 간의 주제 내용을 비교하십시오
폴더 내부에 많은 장미 주머니가 있고 모든 Rosbag가 동일한 주제를 가지고 있는지 여부를 알지 못합니다. rosbag-compare 다음과 같습니다.
rosbag-compare PYPI에서 설치할 수 있습니다.
$ pip install rosbag-compare rosbag-compare 명령 줄 애플리케이션 및 Python 코드로 사용할 수 있습니다.
rosbag-compare 의 기본 사용은 Rosbags가 포함 된 폴더의 경로로 간단히 호출하는 것입니다. 이것은 단순히 topics_<name-of-bagfolder>.json 의 비교 요약으로 JSON 파일을 생성합니다.
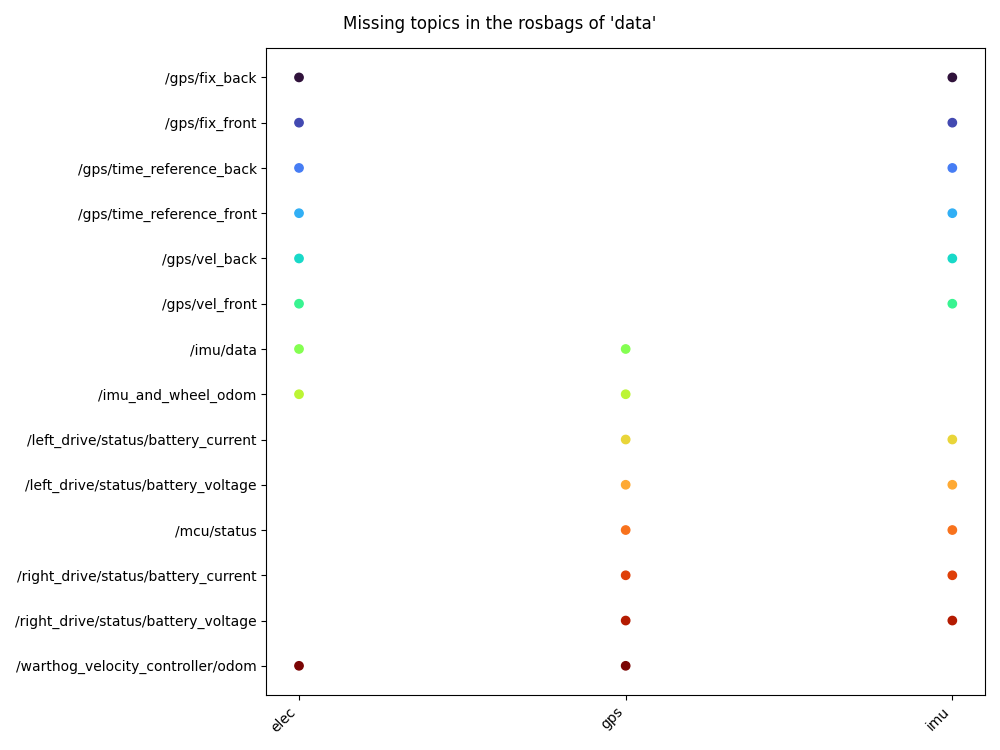
$ rosbag-compare -b /path/to/folder/with/rosbags 또한 --plot/-p 플래그를 사용하여 각 Rosbag에서 누락 된 주제를 보여주는 그림을 생성 할 수도 있습니다. 이 수치는 실험의 모든 Rosbag에 관심있는 주제가 포함되어 있는지 확인하고 싶을 때 도움이됩니다.
$ rosbag-compare -b /path/to/folder/with/rosbags -p Python 코드로 직접 rosbag-compare 호출 할 수도 있습니다.
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path 풀 요청을 환영하며 문제를 주저하지 마십시오.
PIP를 사용하여 개발 요구 사항을 설치할 수 있습니다.
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt 이 프로젝트는 MIT 라이센스에 따라 라이센스가 부여됩니다


