rosbag compare
v0.1.0
Compare el contenido del tema entre Rosbags
Digamos que tienes un montón de rosas dentro de una carpeta y no sabes si todos esos rosbags tienen o no los mismos temas. rosbag-compare :
rosbag-compare se puede instalar desde PYPI:
$ pip install rosbag-compare rosbag-compare se puede usar tanto como una aplicación de línea de comandos como en el código Python.
Un uso básico de rosbag-compare es simplemente llamarlo con la ruta de la carpeta que contiene Rosbags. Esto simplemente generará un archivo JSON con un resumen de la comparación en topics_<name-of-bagfolder>.json .
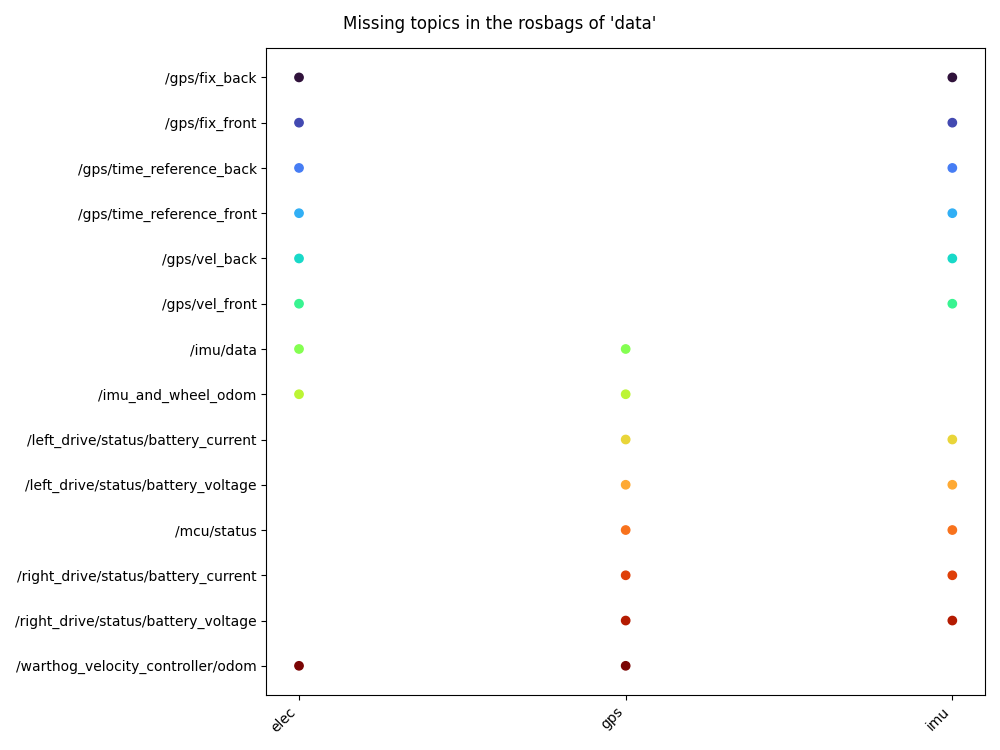
$ rosbag-compare -b /path/to/folder/with/rosbags También puede generar una figura que muestre qué temas faltan en cada bolsa de rostro con la bandera --plot/-p . Esta figura ayuda cuando desea averiguar si todas las bolsas de rostro de su experimento contienen los temas que son de su interés.
$ rosbag-compare -b /path/to/folder/with/rosbags -p También puede llamar a rosbag-compare directamente a su código Python:
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path Las solicitudes de extracción son bienvenidas y no dudes en abrir problemas
Los requisitos de desarrollo se pueden instalar utilizando PIP:
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt Este proyecto tiene licencia bajo una licencia MIT


