rosbag compare
v0.1.0
Bandingkan konten topik antara rosbags
Katakanlah Anda memiliki banyak rosbag di dalam folder dan Anda tidak tahu apakah semua rosbag itu memiliki topik yang sama. rosbag-compare Will:
rosbag-compare dapat dipasang dari PYPI:
$ pip install rosbag-compare rosbag-compare dapat digunakan baik sebagai aplikasi baris perintah dan dalam kode Python.
Penggunaan dasar rosbag-compare adalah dengan hanya menyebutnya dengan jalur folder yang berisi rosbag. Ini hanya akan menghasilkan file JSON dengan ringkasan perbandingan di topics_<name-of-bagfolder>.json .
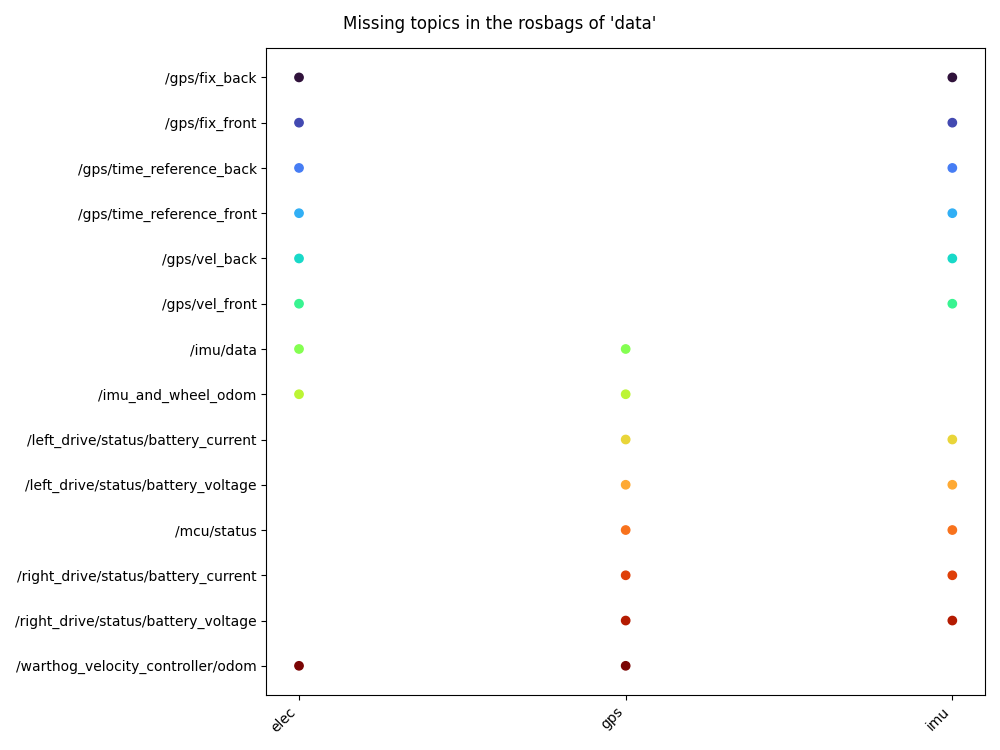
$ rosbag-compare -b /path/to/folder/with/rosbags Anda juga dapat menghasilkan angka yang akan menunjukkan topik apa yang hilang di setiap rosbag dengan bendera --plot/-p . Angka ini membantu ketika Anda ingin mengetahui apakah semua rosbag dari percobaan Anda berisi topik yang menarik minat Anda.
$ rosbag-compare -b /path/to/folder/with/rosbags -p Anda juga dapat menghubungi rosbag-compare langsung ke kode Python Anda:
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path Permintaan tarik dipersilakan dan jangan ragu untuk membuka masalah
Persyaratan pengembangan dapat dipasang menggunakan PIP:
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt Proyek ini dilisensikan di bawah lisensi MIT


