rosbag compare
v0.1.0
Comparez le contenu du sujet entre Rosbags
Disons que vous avez un tas de rosbags à l'intérieur d'un dossier et que vous ne savez pas si tous ces bornes ont les mêmes sujets. rosbag-compare Will:
rosbag-compare peut être installé à partir de PYPI:
$ pip install rosbag-compare rosbag-compare peut être utilisé à la fois comme application de ligne de commande et dans le code Python.
Une utilisation de base de rosbag-compare est de l'appeler simplement avec le chemin du dossier qui contient des rosbags. Cela générera simplement un fichier JSON avec un résumé de la comparaison dans topics_<name-of-bagfolder>.json .
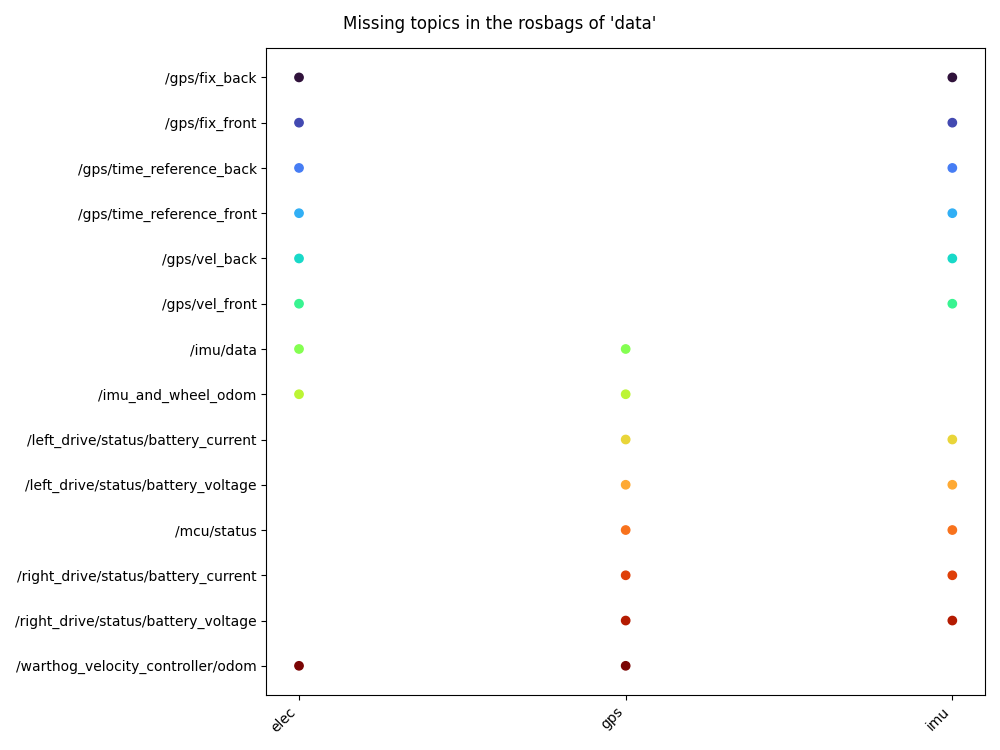
$ rosbag-compare -b /path/to/folder/with/rosbags Vous pouvez également générer une figure qui montrera quels sujets manquent dans chaque bac à rosage avec l'indicateur --plot/-p . Ce chiffre aide lorsque vous voulez savoir si tous les rosbags de votre expérience contient les sujets qui sont de votre intérêt.
$ rosbag-compare -b /path/to/folder/with/rosbags -p Vous pouvez également appeler rosbag-compare directement dans votre code Python:
from rosbag_compare import RosbagComparator
data_path = "/path/to/folder/with/rosbags"
rbag_comp = RosbagComparator ( data_path )
# This step may take time as it open each rosbag separately
# Will show a progress bar
rbag_comp . extract_data ()
# Export summary to a JSON file
rbag_comp . to_json () # Defaults to topics_<foldername>.json
rbag_comp . to_json ( "exported_summary.json" )
# Generate a figure with the name of the
# missing topics for each rosbag
rbag_comp . plot () # Show figure
rbag_comp . plot ( save_fig = True ) # Save figure (defaults to missing_topics.png)
rbag_comp . plot ( save_fig = True , img_path = "topics_summary.jpg" ) # Save figure to path Les demandes de traction sont les bienvenues et n'hésitez pas à ouvrir des problèmes
Les exigences de développement peuvent être installées à l'aide de PIP:
$ python -m venv venv
$ source venv/bin/activate
$ pip install -r requirements/requirements-dev.txt Ce projet est sous licence MIT


