pyoptim
1.0.0
Pyoptim: пакет Python для оптимизации и матрицы
Этот проект, компонент курса численного анализа и оптимизации в Ensias, Университет Мухаммеда V возник из предложения профессора М. Наума создать алгоритмы инкапсулирования Python, практикуемые во время лабораторных сессий. Он фокусируется примерно на десяти неограниченных алгоритмах оптимизации, предлагая 2D и 3D визуализации, что позволяет сравнить производительность в вычислительной эффективности и точности. Кроме того, проект охватывает матричные операции, такие как инверсия, разложение и решение линейных систем, все интегрированы в пакет, содержащий алгоритмы, полученные из лаборатории.
Источник GIF: https://www.nsf.gov/news/mmg/mmg_disp.jsp?med_id=78950&from==n(https://aria42.com/blog/2014/12/understanding-lbfgs
Каждая часть этого проекта - это пример кода, который показывает, как сделать следующее:
Реализация алгоритмов оптимизации с одной переменной, охватывающей фиксированную_step, accelerated_step, trushive_search, dichotomous_search, evternate_halling, fibonacci, Golden_section, armijo_backward и armijo_forward.
Включение различных алгоритмов оптимизации с одной переменной, в том числе градиент спуск, градиент, конъюгат, Ньютон, Quasi_newton_DFP, стохастический градиент.
Визуализация каждого шага итерации для всех алгоритмов в форматах 2D, контура и 3D.
Проведение сравнительного анализа, сосредоточенного на их показателях выполнения и точности.
Внедрение матричных операций, таких как инверсия (например, Гаусс-Джордан), разложение (например, Lu, Choleski) и решения для линейных систем (например, Гаусс-Джордан, Лу, Чолски).
Чтобы установить этот пакет Python:
pip install pyoptimЗапустите эту демонстрационную записную книжку
import pyoptim . my_scipy . onevar_optimize . minimize as soom
import pyoptim . my_plot . onevar . _2D as po2 
def f ( x ):
return x * ( x - 1.5 ) # analytically, argmin(f) = 0.75 
xs = - 10
xf = 10
epsilon = 1.e-2 print ( 'x* =' , soom . fixed_step ( f , xs , epsilon ))
po2 . fixed_step ( f , xs , epsilon ) x* = 0.75 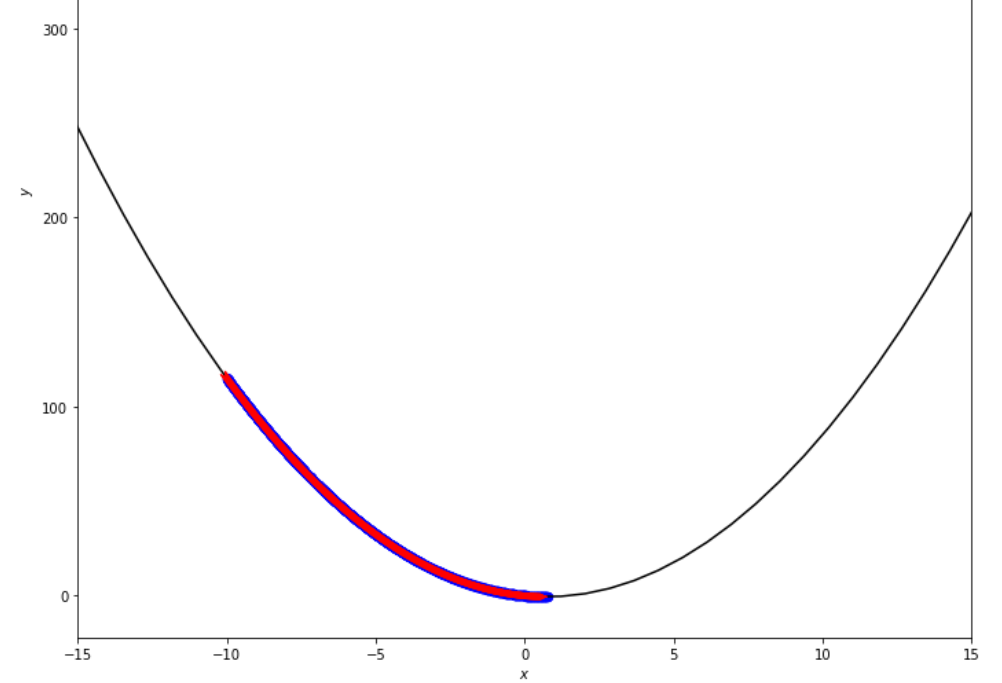
Последовательность шагов, предпринятых с помощью алгоритма фиксированного шага, прежде чем достичь минимального
print ( 'x* =' , soom . accelerated_step ( f , xs , epsilon ))
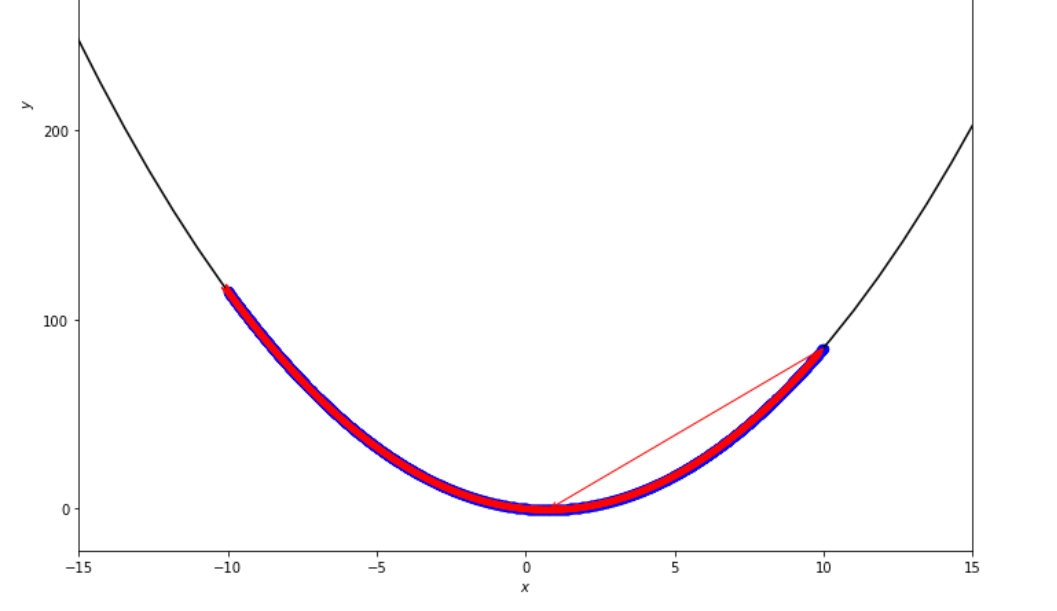
po2 . accelerated_step ( f , xs , epsilon ) x* = 0.86 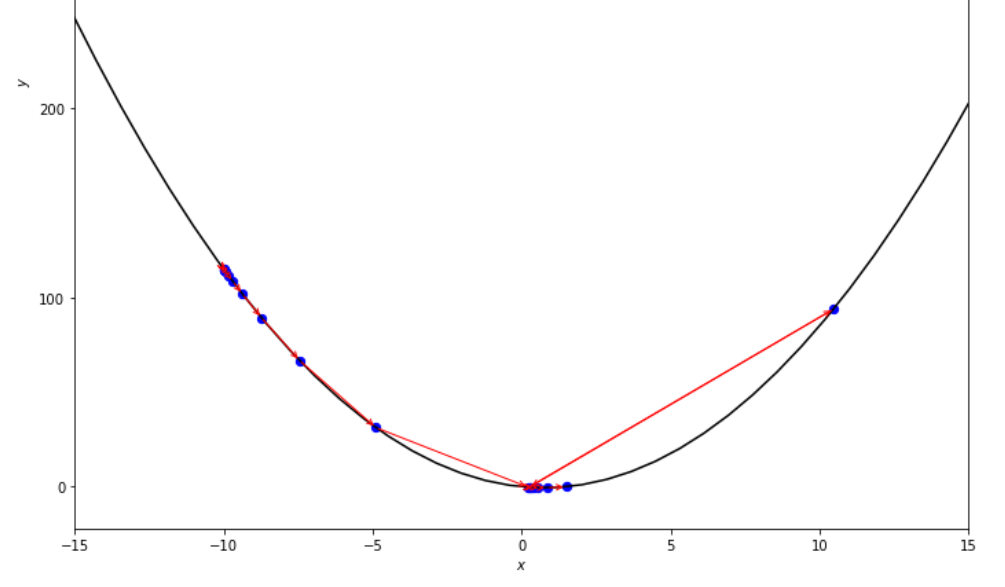
Последовательность шагов, предпринятых с помощью ускоренного алгоритма шага до достижения минимального
print ( 'x* =' , soom . exhaustive_search ( f , xs , xf , epsilon ))
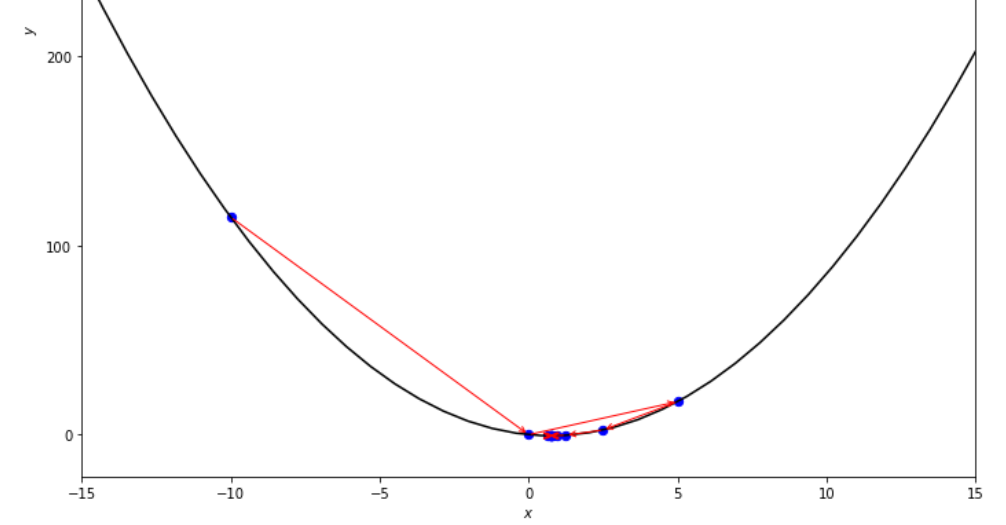
po2 . exhaustive_search ( f , xs , xf , epsilon ) x* = 0.75
Последовательность шагов, предпринятых с помощью исчерпывающего алгоритма поиска, прежде чем достичь минимального
mini_delta = 1.e-3
print ( 'x* =' , soom . dichotomous_search ( f , xs , xf , epsilon , mini_delta ))
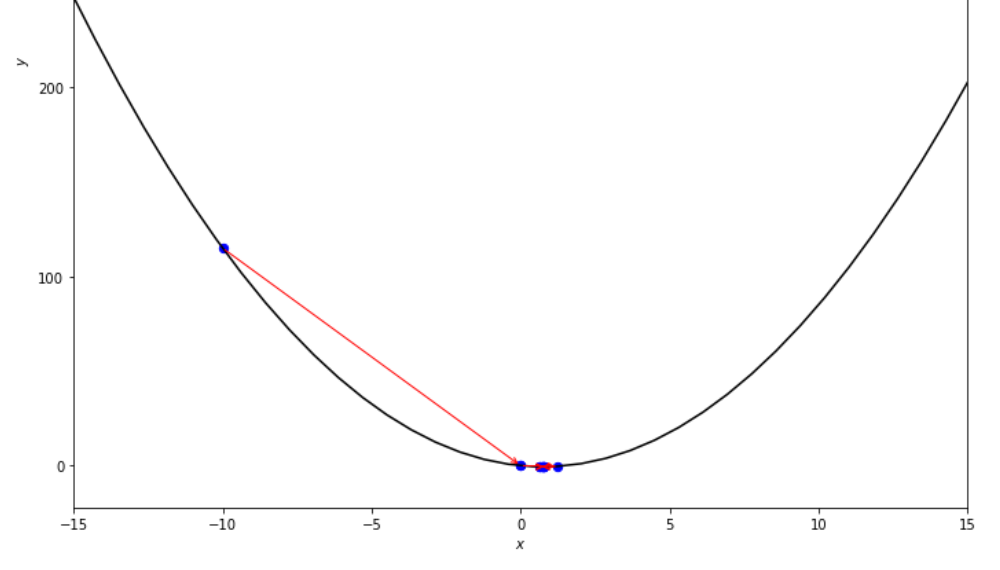
po2 . dichotomous_search ( f , xs , xf , epsilon , mini_delta ) x* = 0.7494742431640624
Последовательность шагов, предпринятых дихотомическим алгоритмом поиска, прежде чем достичь минимума
print ( 'x* =' , soom . interval_halving ( f , xs , xf , epsilon ))
po2 . interval_halving ( f , xs , xf , epsilon ) x* = 0.75
Последовательность шагов, предпринятых с помощью алгоритма с интервалом вдвое, до достижения минимума.
n = 15
print ( 'x* =' , soom . fibonacci ( f , xs , xf , n ))
po2 . fibonacci ( f , xs , xf , n ) x* = 0.76 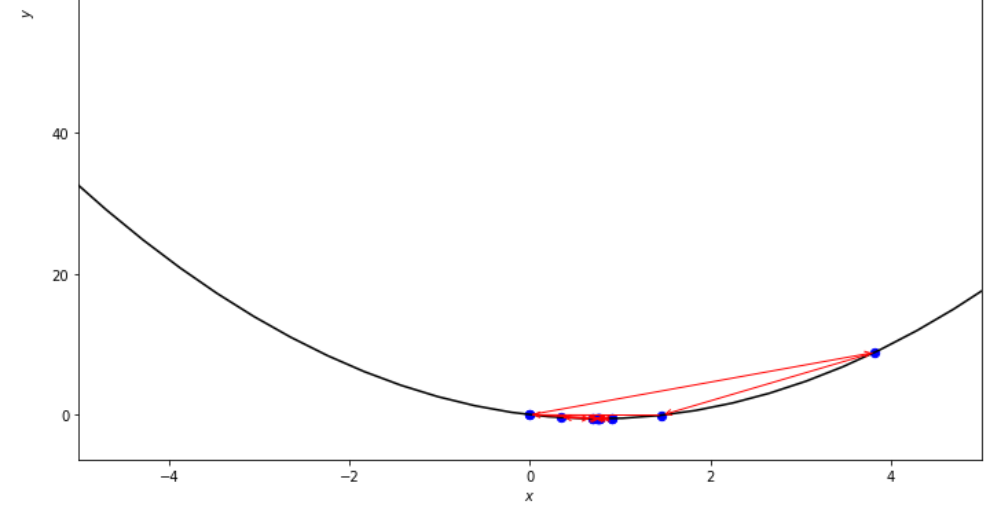
Последовательность шагов, предпринятых алгоритмом Фибоначчи, до достижения минимума.
print ( 'x* =' , soom . golden_section ( f , xs , xf , epsilon ))
po2 . golden_section ( f , xs , xf , epsilon ) x* = 0.75 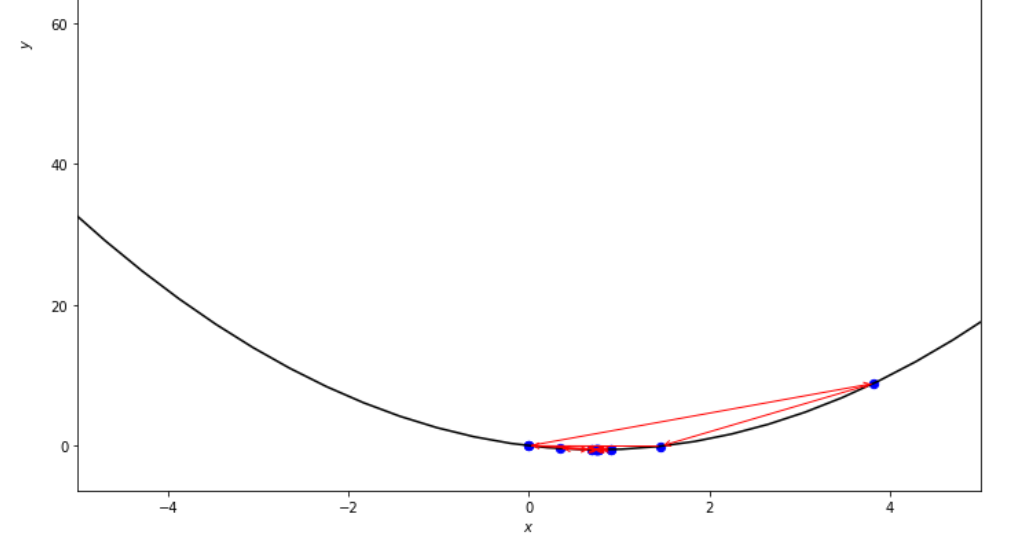
Последовательность шагов, предпринятых алгоритмом золотой секции, прежде чем достичь минимального
ŋ = 2
xs = 100
print ( 'x* =' , soom . armijo_backward ( f , xs , ŋ , epsilon ))
po2 . armijo_backward ( f , xs , ŋ , epsilon ) x* = 0.78 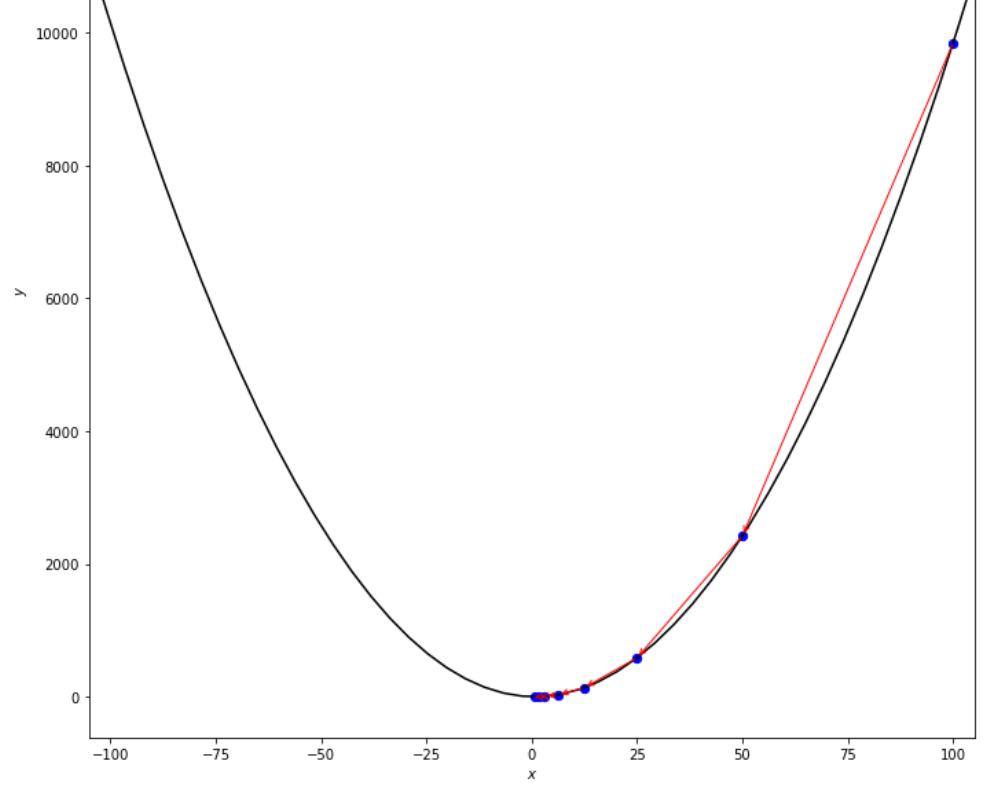
Последовательность шагов, сделанных алгоритмом Armijo, до достижения минимума
xs = 0.1
epsilon = 0.5
ŋ = 2
print ( 'x* =' , soom . armijo_forward ( f , xs , ŋ , epsilon ))
po2 . armijo_forward ( f , xs , ŋ , epsilon ) x* = 0.8 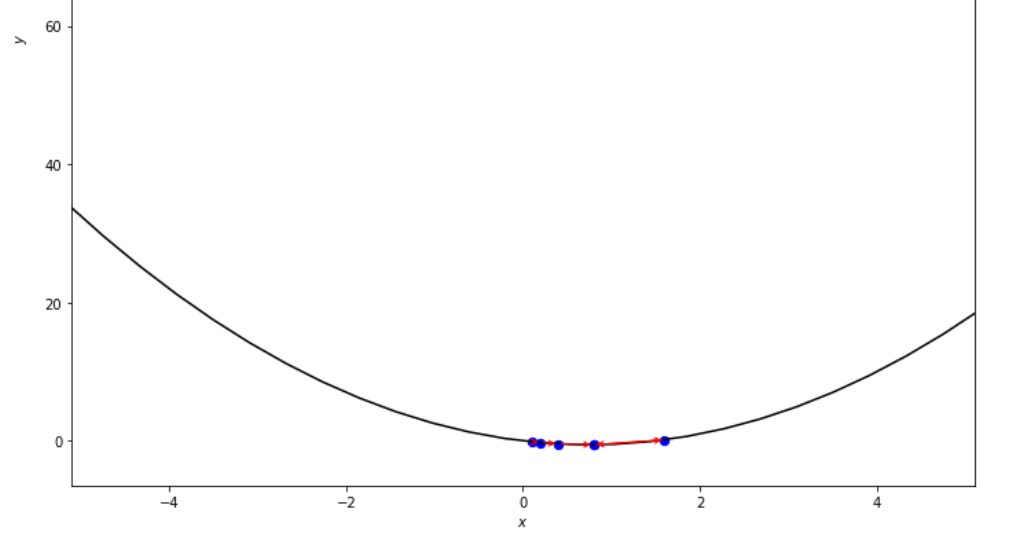
Последовательность шагов, предпринятых алгоритмом прямого Армихо, до достижения минимального
po2 . compare_all_time ( f , 0 , 2 , 1.e-2 , 1.e-3 , 10 , 2 , 0.1 , 100 ) Время выполнения 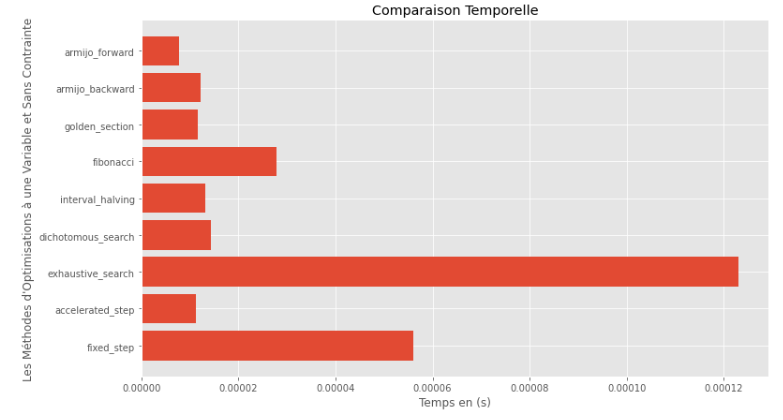
po2 . compare_all_precision ( f , 0 , 2 , 1.e-2 , 1.e-3 , 10 , 2 , 0.1 , 100 ) Разрыв между истинным и вычисленным минимальным 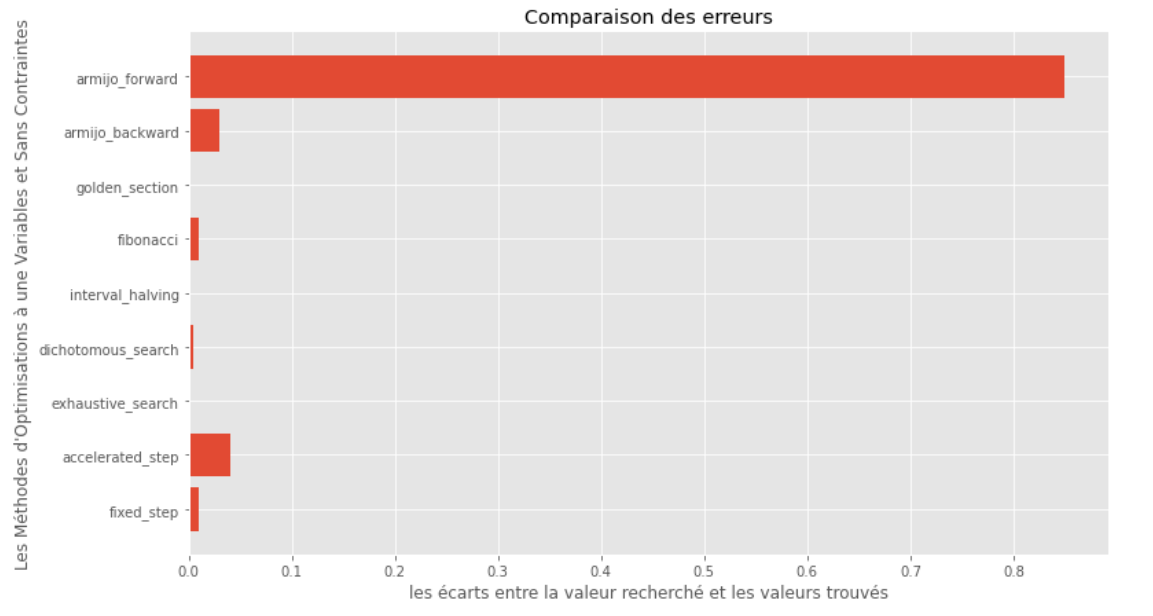
Из графиков времени выполнения и точности можно сделать вывод, что среди алгоритмов, оцениваемых для этой выпуктной функции с одной переменной, метод золотого секции появляется как оптимальный выбор, предлагая смесь высокой точности и особенно низкой времени выполнения.
import pyoptim . my_plot . multivar . _3D as pm3
import pyoptim . my_plot . multivar . contour2D as pmc def h ( x ):
return x [ 0 ] - x [ 1 ] + 2 * ( x [ 0 ] ** 2 ) + 2 * x [ 1 ] * x [ 0 ] + x [ 1 ] ** 2
# analytically, argmin(f) = [-1, 1.5]Аналичное решение
X = [ 1000 , 897 ]
alpha = 1.e-2
tol = 1.e-2 pmc . gradient_descent ( h , X , tol , alpha )
pm3 . gradient_descent ( h , X , tol , alpha ) Y* = [-1.01 1.51] Последовательность шагов, предпринятых алгоритмом градиентного спуска, прежде чем достичь минимального 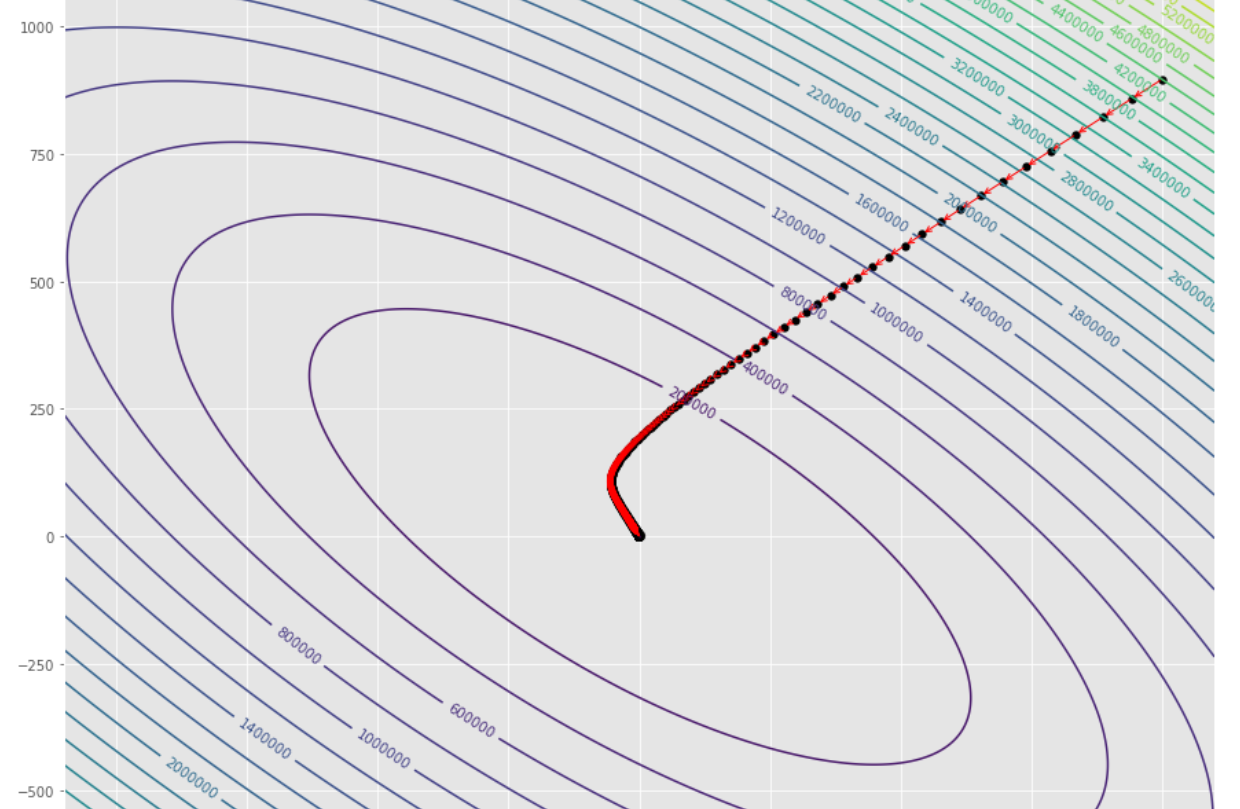
Контурный сюжет 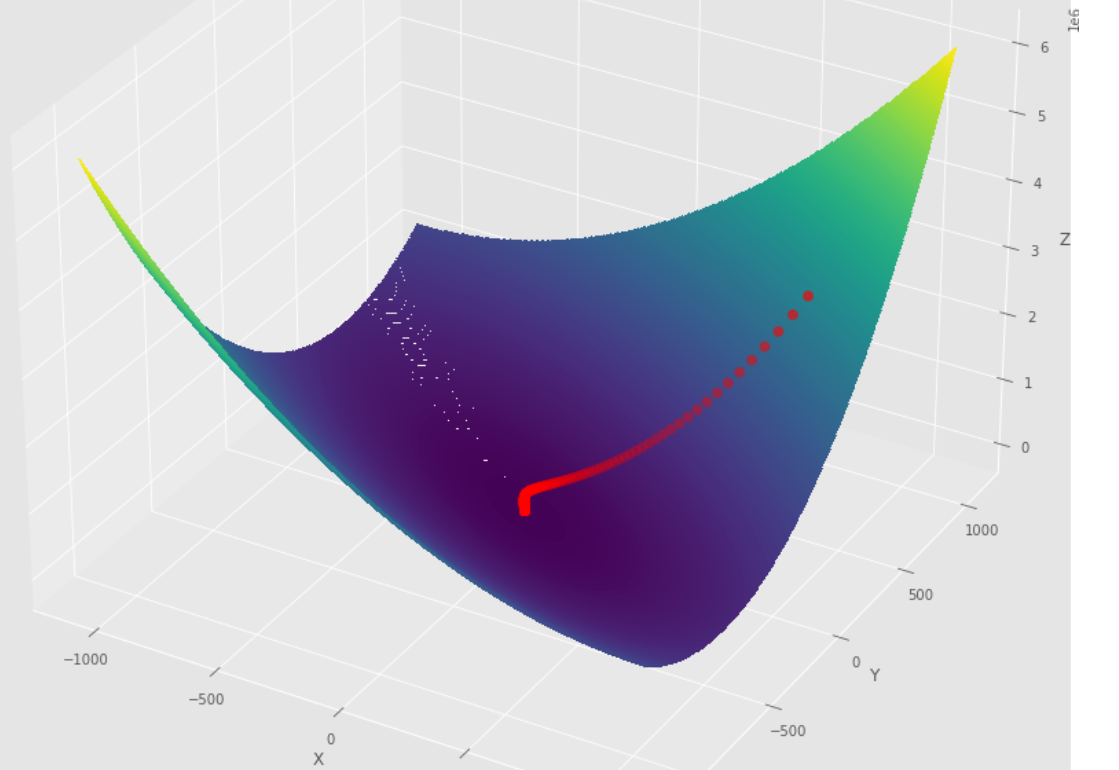
3 -й сюжет
pmc . gradient_conjugate ( h , X , tol )
pm3 . gradient_conjugate ( h , X , tol ) Y* = [-107.38 172.18] Последовательность шагов, предпринятых с помощью алгоритма градиентного конъюгата до достижения минимального 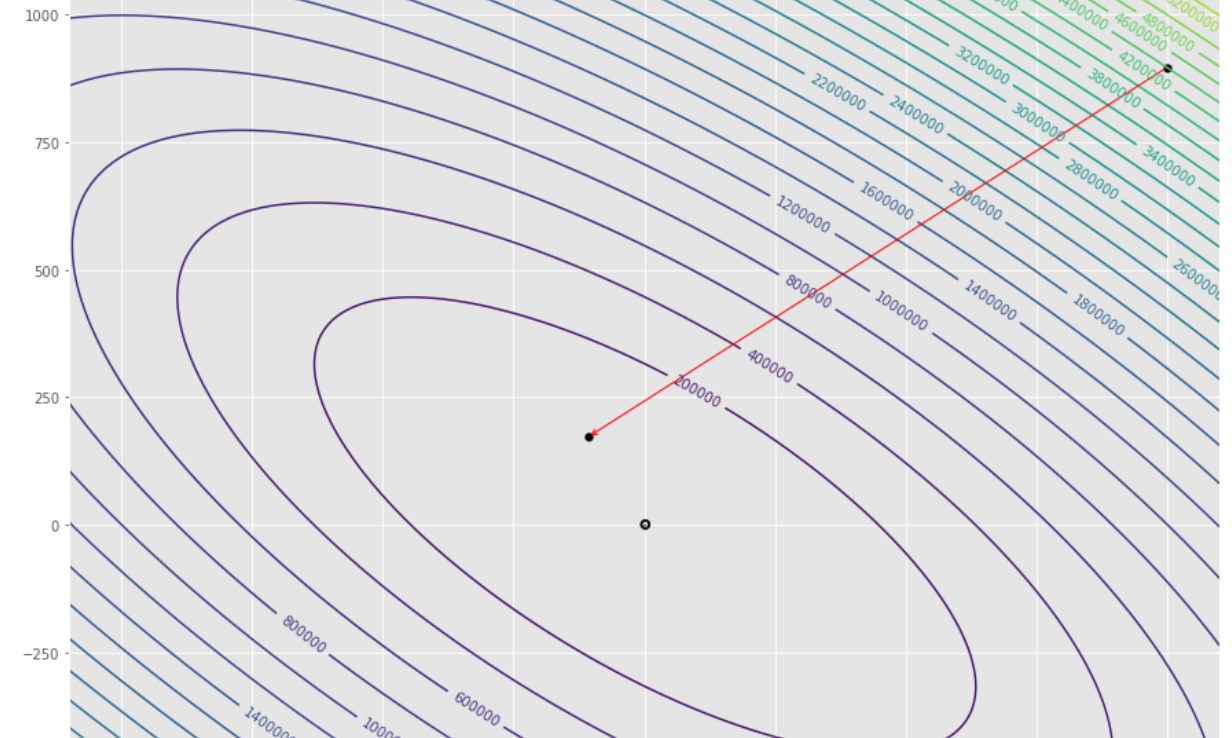
Контурный сюжет 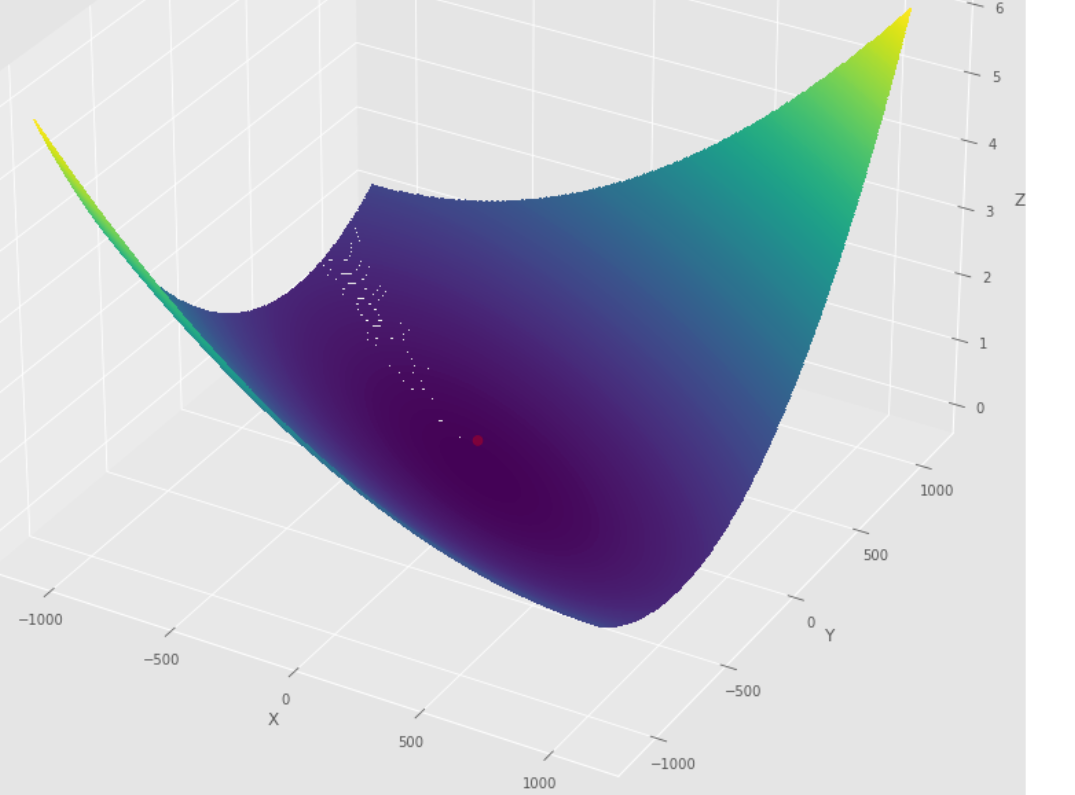
3 -й сюжет
pmc . newton ( h , X , tol )
pm3 . newton ( h , X , tol ) Y* = [-1. 1.5] Последовательность шагов, предпринятых алгоритмом Ньютона, до достижения минимального 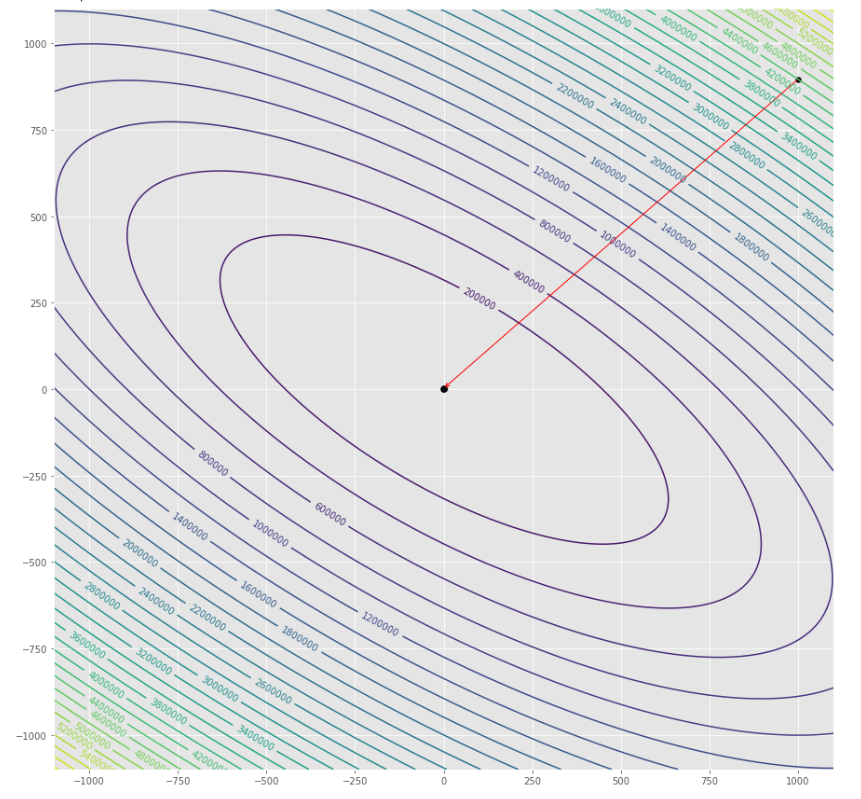
Контурный сюжет 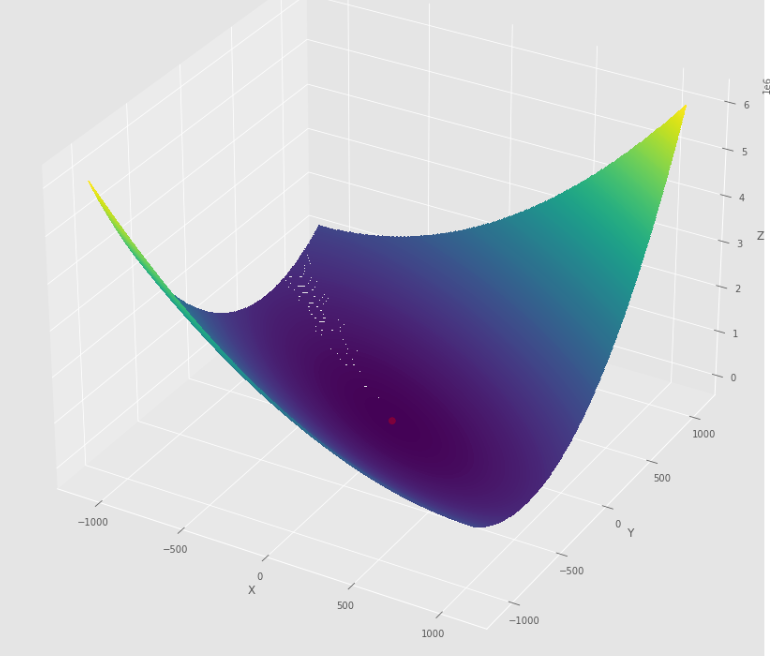
3 -й сюжет
pmc . quasi_newton_dfp ( h , X , tol )
pm3 . quasi_newton_dfp ( h , X , tol ) Y* = [-1. 1.5] Последовательность шагов, предпринятых алгоритмом квази Ньютона DFP, до достижения минимума 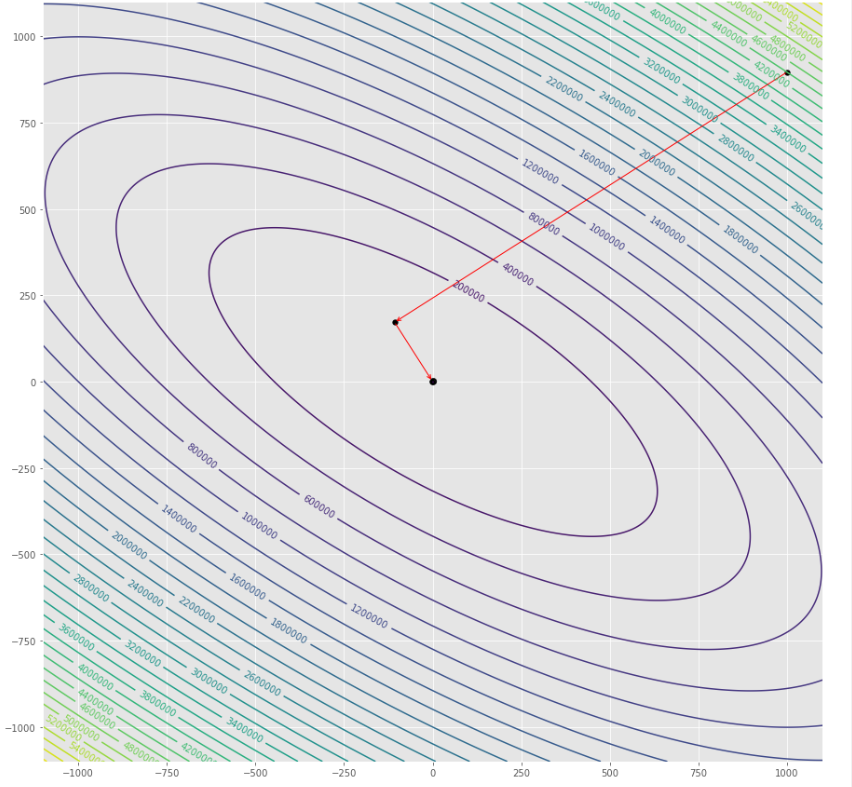
Контурный сюжет 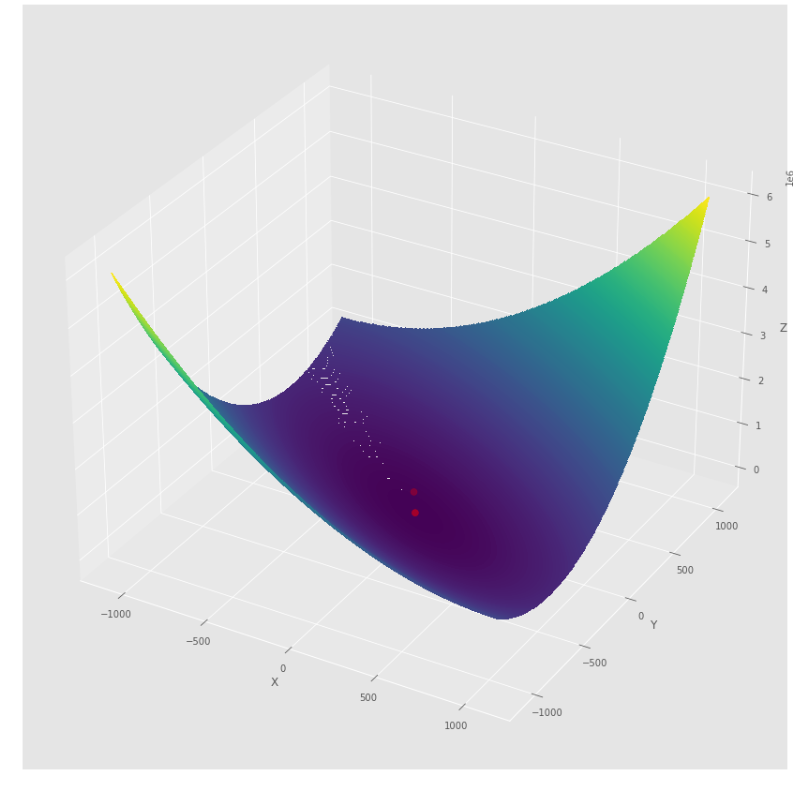
3 -й сюжет
pmc . sgd ( h , X , tol , alpha )
pm3 . sgd ( h , X , tol , alpha ) Y* = [-1.01 1.52] Последовательность шагов, предпринятых алгоритмом спуска стохастического градиента, прежде чем достичь минимума 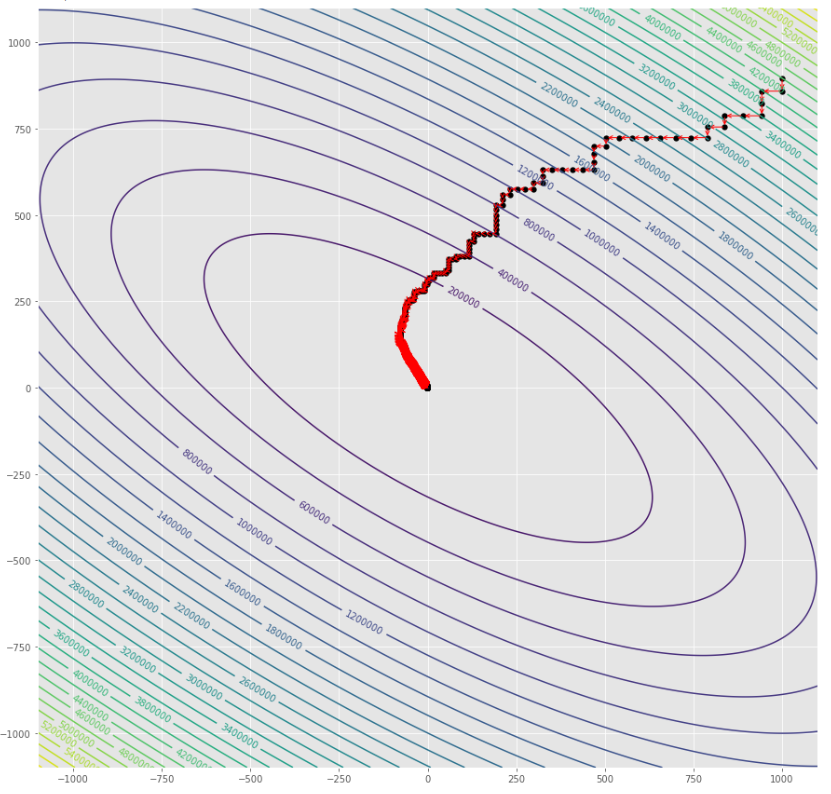
Контурный сюжет 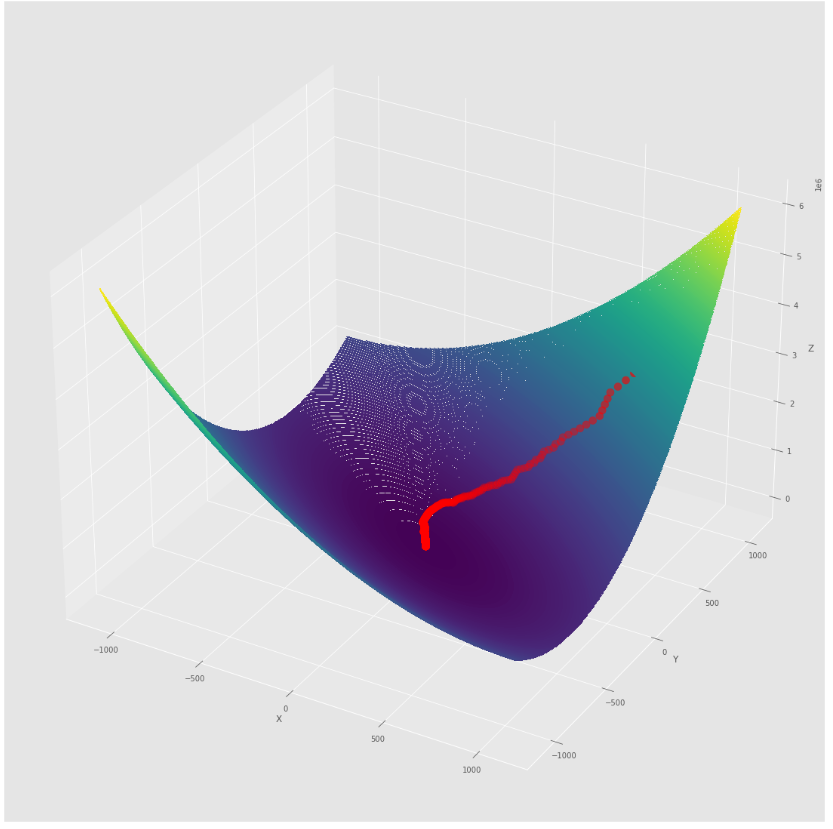
3 -й сюжет
alpha = 100 #it must be high because of BLS
c = 2
pmc . sgd_with_bls ( h , X , tol , alpha , c )
pm3 . sgd_with_bls ( h , X , tol , alpha , c ) Y* = [-1. 1.5] Последовательность шагов, предпринятых с помощью стохастического градиента с алгоритмом BLS, прежде чем достичь минимального 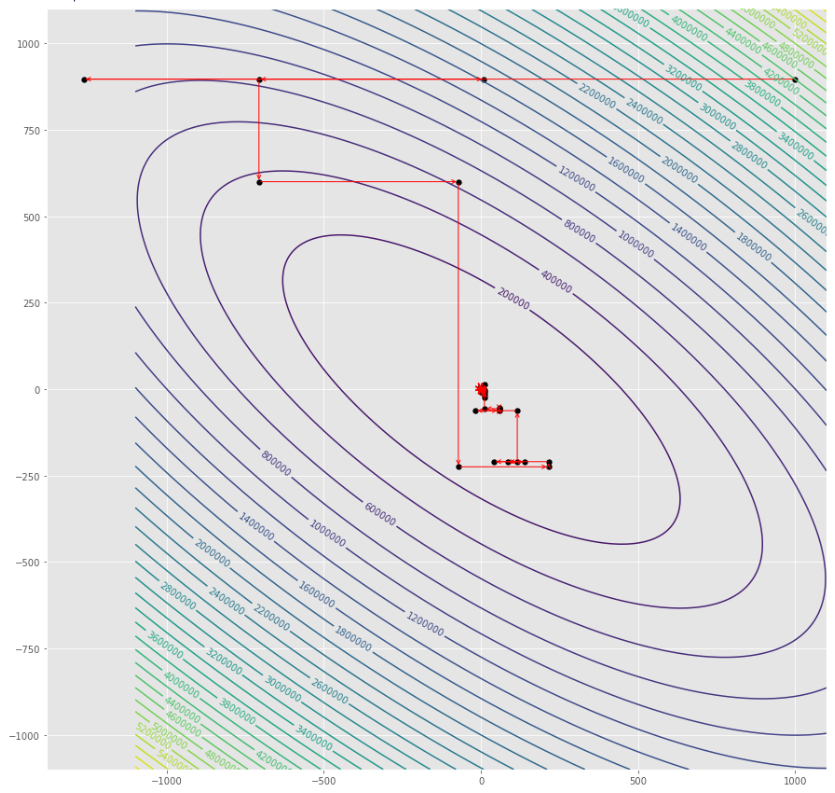
Контурный сюжет 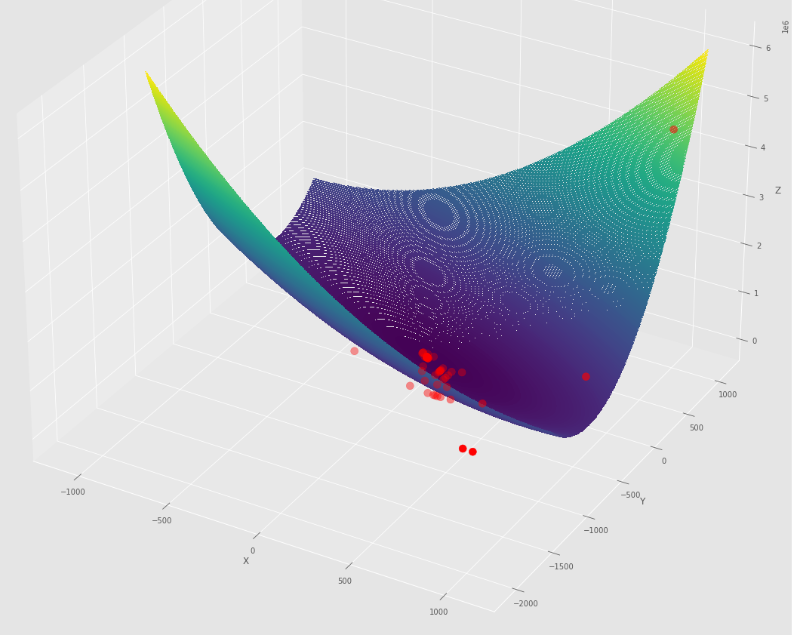
3 -й сюжет
pm3 . compare_all_time ( h , X , 1.e-2 , 1.e-1 , 100 , 2 ) Время выполнения 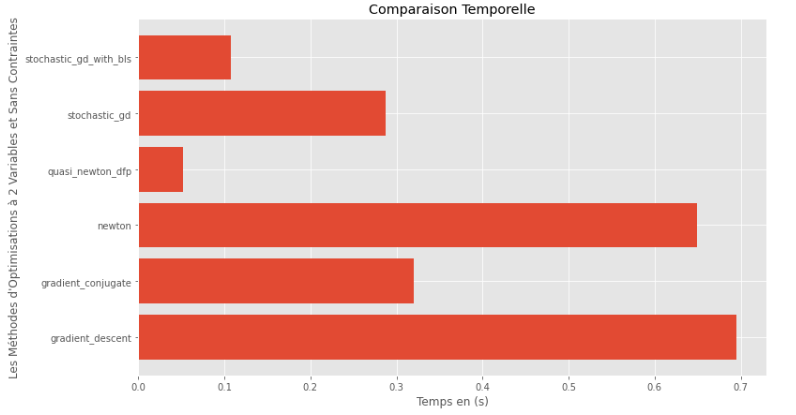
pm3 . compare_all_precision ( h , X , 1.e-2 , 1.e-1 , 100 , 2 ) Разрыв между истинным и вычисленным минимальным 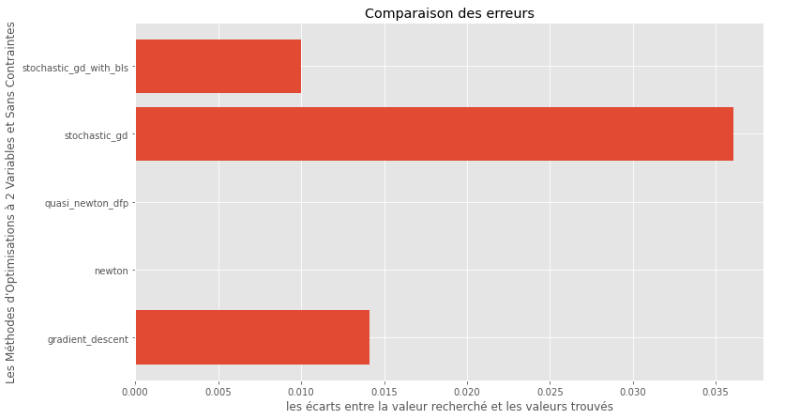
Из графиков времени выполнения и точности можно сделать вывод, что среди алгоритмов, оцениваемых для этой выпуклой многофункциональной функции, метод Quasi Newton DFP появляется в качестве оптимального выбора, предлагая смесь высокой точности и, в частности, низкой времени выполнения.
import pyoptim . my_numpy . inverse as npi 
A = np . array ([[ 1. , 2. , 3. ],[ 0. , 1. , 4. ],[ 5. , 6. , 0. ]]) A_1 = npi . gaussjordan ( A . copy ())
I = A @ A_1
I = np . around ( I , 1 )
print ( 'A_1 = n n ' , A_1 )
print ( ' n A_1*A = n n ' , I ) A_1 =
[[-24. 18. 5.]
[ 20. -15. -4.]
[ -5. 4. 1.]]
A_1*A =
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]] import pyoptim . my_numpy . decompose as npd A = np . array ([[ 1. , 2. , 3. ],[ 0. , 1. , 4. ],[ 5. , 6. , 0. ]]) #A is not positive definite
B = np . array ([[ 2. , - 1. , 0. ],[ - 1. , 2. , - 1. ],[ 0. , - 1. , 2. ]]) #B is positive definite
Y = np . array ([ 45 , - 78 , 95 ]) #randomly chosen column vector L , U , P = npd . LU ( A )
print ( "P = n " , P , " n n L = n " , L , " n n U = n " , U )
print ( " n " , A == P @ L @ U ) P =
[[0. 0. 1.]
[0. 1. 0.]
[1. 0. 0.]]
L =
[[1. 0. 0. ]
[0. 1. 0. ]
[0.2 0.8 1. ]]
U =
[[ 5. 6. 0. ]
[ 0. 1. 4. ]
[ 0. 0. -0.2]]
[[ True True True]
[ True True True]
[ True True True]] L = npd . choleski ( A ) # A is not positive definite
print ( L )
print ( "--------------------------------------------------" )
L = npd . choleski ( B ) # B is positive definite
print ( 'L = n ' , L , ' n ' )
C = np . around ( L @( L . T ), 1 )
print ( 'B = L@(L.T) n n ' , B == C ) A must be positive definite !
None
--------------------------------------------------
L =
[[ 1.41421356 0. 0. ]
[-0.70710678 1.22474487 0. ]
[ 0. -0.81649658 1.15470054]]
B = L@(L.T)
[[ True True True]
[ True True True]
[ True True True]] import pyoptim . my_numpy . solve as nps 
A = np . array ([[ 1. , 2. , 3. ], [ 0. , 1. , 4. ], [ 5. , 6. , 0. ]]) # A is not positive definite
B = np . array ([[ 2. , - 1. , 0. ], [ - 1. , 2. , - 1. ], [ 0. , - 1. , 2. ]]) # B is positive definite
Y = np . array ([ 45 , - 78 , 95 ]) # randomly chosen column vector X = nps . gaussjordan ( A , Y )
print ( "X = n " , X )
print ( " n A@X=Y n " , A @ X == Y , ' n ' )
print ( '---------------------------------------------------------------' )
X = nps . gaussjordan ( B , Y )
print ( "X = n " , X )
Y_ = np . around ( B @ X , 1 )
print ( " n B@X=Y n " , Y_ == Y , ' n ' ) X =
[[-2009.]
[ 1690.]
[ -442.]]
A@X=Y
[[ True]
[ True]
[ True]]
---------------------------------------------------------------
X =
[[18.5]
[-8. ]
[43.5]]
B@X=Y
[[ True]
[ True]
[ True]]
X = nps . LU ( A , Y )
print ( "X* = n " , X )
print ( " n AX*=Y n " , A @ X == Y )
print ( "-------------------------------------------------------------------------------" );
X = nps . LU ( B , Y )
print ( "X* = n " , X )
Y_ = np . around ( B @ X , 1 )
print ( " n BX*=Y n " , Y_ == Y ) X* =
[[-2009.]
[ 1690.]
[ -442.]]
AX*=Y
[[ True]
[ True]
[ True]]
-------------------------------------------------------------------------------
X* =
[[18.5]
[-8. ]
[43.5]]
BX*=Y
[[ True]
[ True]
[ True]] X = nps . choleski ( A , Y )
print ( "-------------------------------------------------------------------------------" )
X = nps . choleski ( B , Y )
print ( "X = n " , X )
Y_ = np . around ( B @ X , 1 )
print ( " n BX*=Y n " , Y_ == Y ) !! A must be positive definite !!
-------------------------------------------------------------------------------
X =
[[18.5]
[-8. ]
[43.5]]
BX*=Y
[[ True]
[ True]
[ True]]

