QuadMeUp_Crossbow
1.0.0
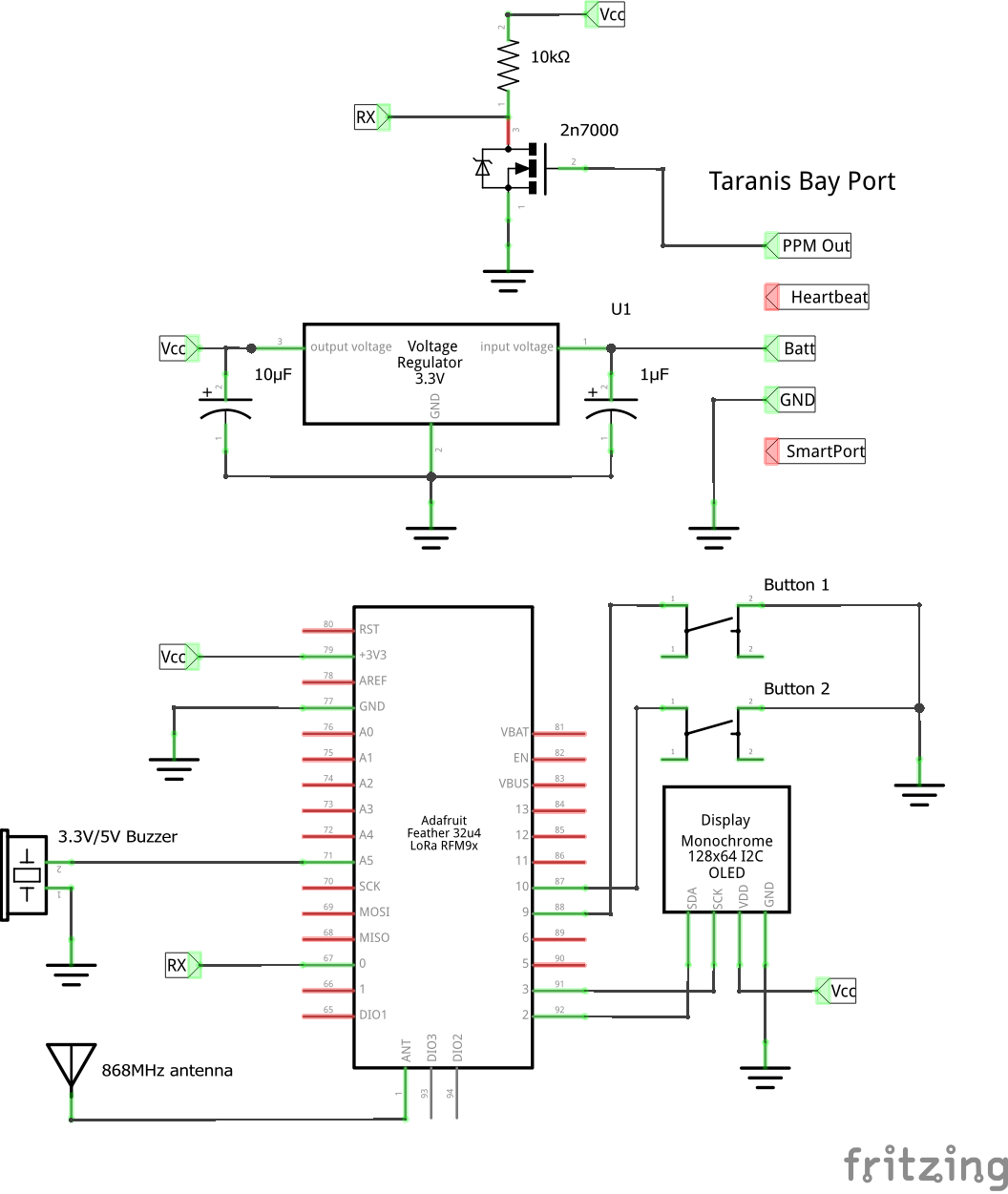
Quadmeup Crossbow是一個DIY項目,為無人機(飛機和無人機)提供5公里(至少)的RC鏈接,價格低於40美元。我使用SX1278(Lora 868MHz/915MHz)兼容(例如Hoperf RFM95W)無線電模塊,這些無線電模塊連接到Arduino兼容板。它可以通過SPI連接到SX1278,也可以是常規的Arduino,也可以像Adafruit Feather 32U4 RFM Lora或Lora32U4 II這樣的專用板連接。
未來版本可能會移植到ESP32 LORA32模塊。
作品:
需要實施:
要編譯,必須安裝以下庫:
| 位元組 | 描述 | 筆記 |
|---|---|---|
| 1 | 框架類型和二手廣播頻道 | 位7-5定義框架,位4-0當前無線電通道 |
| 2-33 | 有效載荷 | 按幀類型定義的lenghth |
| 有效載荷長度 + 2 | CRC | 使用CRC8_DVB_S2方法 |
使用crc8_dvb_s2方法計算CRC。每個幀CRC的初始CRC值等於4個綁定字節的CRC(發射器模塊唯一)。
| 價值 | 價值十六進制 | 描述 | 方向 | 有效載荷長度 |
|---|---|---|---|---|
| 0000 | 0x0 | RC頻道數據RC_DATA | TX-> Rx | 9 |
| 0001 | 0x1 | 接收者健康和基本遙測RX_HEALTH | RX-> TX | 6 |
| 0010 | 0x2 | 請求接收器配置 | TX-> Rx | 沒有使用 |
| 0011 | 0x3 | 接收器配置 | RX-> TX | 沒有使用 |
| 0100 | 0x4 | 設置接收器配置 | TX-> Rx | 沒有使用 |
| 0101 | 0x5 | ping框架,使用9個字節有效載荷 | TX-> Rx | 4 |
| 0110 | 0x6 | 乒乓球框架,與ping相同的有效載荷 | RX-> TX | 4 |
| 0111 | 0x7 | BIND框架,僅在結合期間由TX傳輸 | TX-> Rx | 4 |
RC_DATA框架格式協議允許將10個RC通道發送總數如下
RC_DATA有效載荷的總長度為9字節
RX_HEALTH框架格式| 位元組 | 描述 |
|---|---|
| 1 | RX RSSI |
| 2 | rx snr |
| 3 | RX電源波動,以0,1V發送 |
| 4 | Rx模擬輸入1以0,1V發送 |
| 5 | Rx模擬輸入2以0,1V發送 |
| 6 | 標誌 |
| 位元 | 意義 |
|---|---|
| 00000001 | 設備處於故障安全模式 |
PING PONG PING和PONG框架是確定TX和RX模塊之間的數據包圓形。 TX用咖哩micros發送PING框架。如果RX接收PING框架,它將其有效載荷作為PONG框架響應。
BIND框架格式| 位元組 | 描述 |
|---|---|
| 1 | 綁定鍵字節0 |
| 2 | 綁定鍵字節1 |
| 3 | 綁定鍵字節2 |
| 4 | 綁定鍵字節3 |
15以下的RSSI中成功飛行20啟用外部RF SBU需要OPENTX 2.2.1或更新。
SBUS1-1612.0ms或14.0ms normal 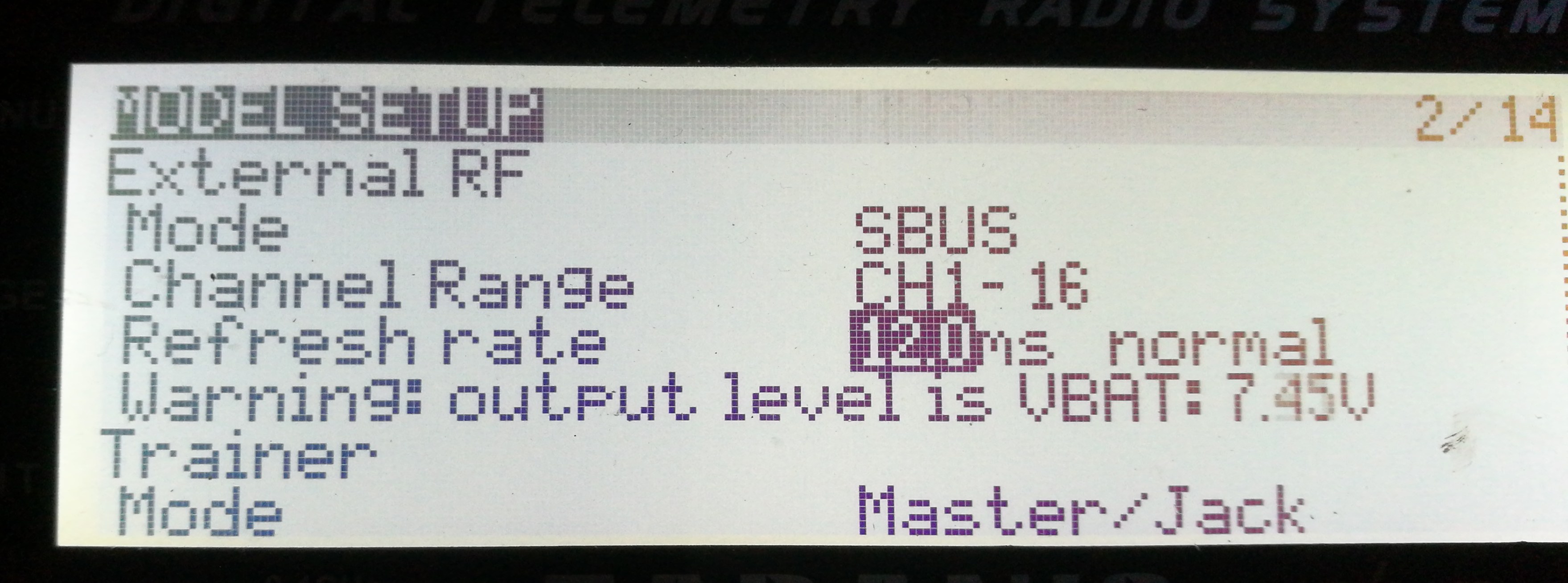
測試:
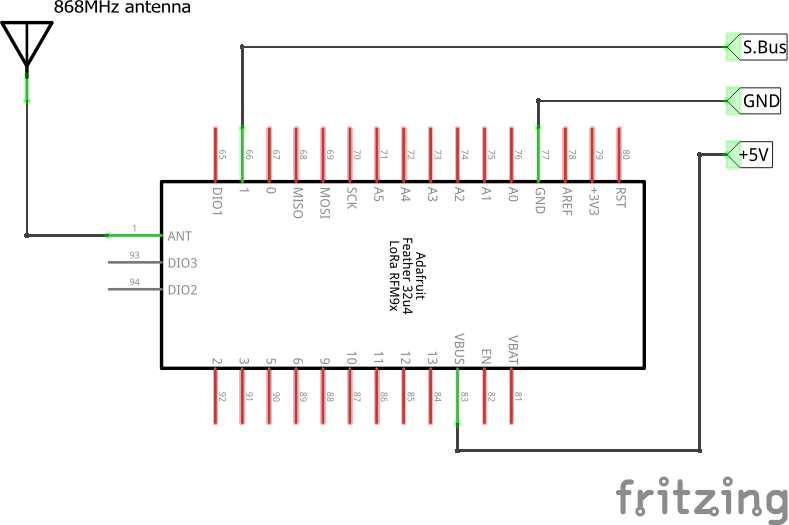
RX模塊使用SBUS協議輸出RC數據。訣竅是DIY RX模塊沒有逆變器,因此SBUS信號也沒有倒置(TTL標準),而標準SBUS協議則使用了倒數串行信號。
這意味著以下內容:
閃爍TX和RX後,需要綁定。