QuadMeUp_Crossbow
1.0.0
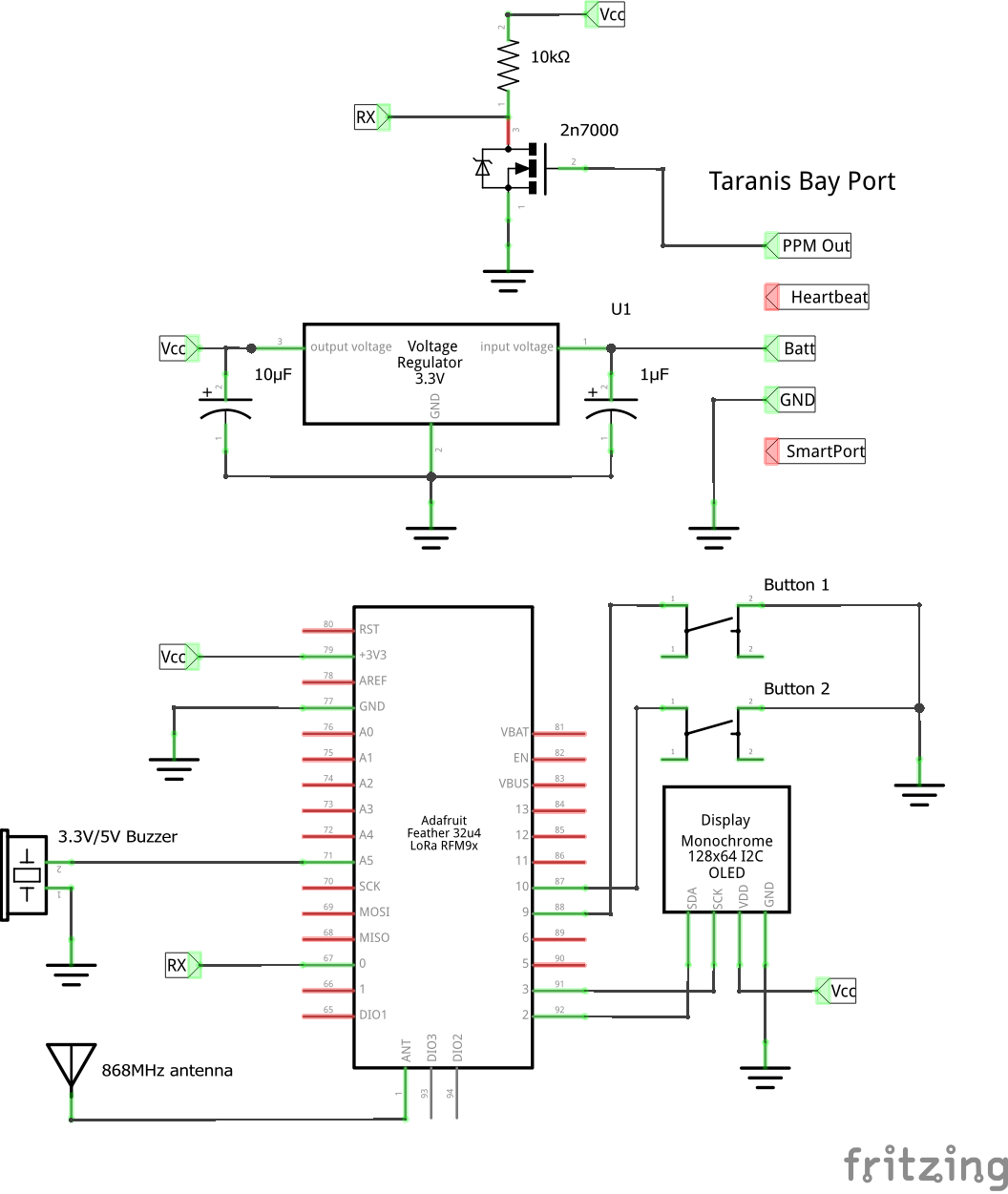
Quadmeup Crossbowは、40ドル未満の価格でUAV(飛行機とドローン)のRCリンクを5km(少なくとも)提供するDIYプロジェクトです。 Arduino互換ボードに接続されたSX1278(LORA 868MHz/915MHz)互換性(Hoperf RFM95Wなど)の無線モジュールを使用します。 SPIを介してSX1278に接続したり、 Adafruit Feather 32U4 RFM LORAまたはLORA32U4 IIなどの専用ボードに接続することもできます。
将来のバージョンは、ESP32 LORA32モジュールに移植される場合があります。
作品:
実装が必要:
コンパイルするには、次のライブラリをインストールする必要があります。
| バイト | 説明 | メモ |
|---|---|---|
| 1 | フレームタイプと中古ラジオチャネル | ビット7-5は、フレーム、ビット4-0の現在の無線チャネルを定義します |
| 2-33 | ペイロード | フレームタイプで定義されたlenghth |
| ペイロード長 + 2 | CRC | CRC8_DVB_S2メソッドを使用します |
CRCは、 crc8_dvb_s2メソッドを使用して計算されます。各フレームCRCの初期CRC値は、4つのバインドバイトのCRCに等しくなります(送信機モジュールには一意)。
| 価値 | 値ヘックス | 説明 | 方向 | ペイロード長 |
|---|---|---|---|---|
| 0000 | 0x0 | RCチャネルデータRC_DATA | TX-> rx | 9 |
| 0001 | 0x1 | 受信機の健康と基本的なテレメトリーRX_HEALTH | rx-> tx | 6 |
| 0010 | 0x2 | レシーバーの構成を要求します | TX-> rx | 使用されていません |
| 0011 | 0x3 | 受信機の構成 | rx-> tx | 使用されていません |
| 0100 | 0x4 | 受信機の構成を設定します | TX-> rx | 使用されていません |
| 0101 | 0x5 | Pingフレームは、9バイトペイロードを使用します | TX-> rx | 4 |
| 0110 | 0x6 | Pongフレーム、Pingと同じペイロード | rx-> tx | 4 |
| 0111 | 0x7 | BINDフレーム、バインディング中にのみTxによって送信されます | TX-> rx | 4 |
RC_DATAフレーム形式プロトコルは、次のようにエンコードされた合計で10個のRCチャネルを送信できます
RC_DATAペイロードの全長は9バイトです
RX_HEALTHフレーム形式| バイト | 説明 |
|---|---|
| 1 | rx rssi |
| 2 | Rx SNR |
| 3 | RX供給ボラテージ、0,1Vで送信 |
| 4 | RXアナログ入力1は0,1Vで送信されます |
| 5 | 0,1Vで送信されたRXアナログ入力2 |
| 6 | フラグ |
| 少し | 意味 |
|---|---|
| 00000001 | フェイルセーフモードのデバイス |
PINGおよびPONGフレームPINGおよびPONGフレームは、 TXモジュールとRXモジュール間のパケットラウンドリップを決定するためです。 TXは、キュレントmicrosでPINGフレームを送信します。 RXがPINGフレームを受信した場合、ペイロードがPONGフレームとして応答します。
BINDフレーム形式| バイト | 説明 |
|---|---|
| 1 | キーバイトをバインドします0 |
| 2 | キーバイトをバインドします1 |
| 3 | キーバイト2をバインドします |
| 4 | キーバイト3をバインドします |
15未満のRSSIでフライトを成功させました20程度でなければなりませんOpentX 2.2.1以降は、有効な外部RF SBUで必要です。
SBUS1-1612.0msまたは14.0ms normal 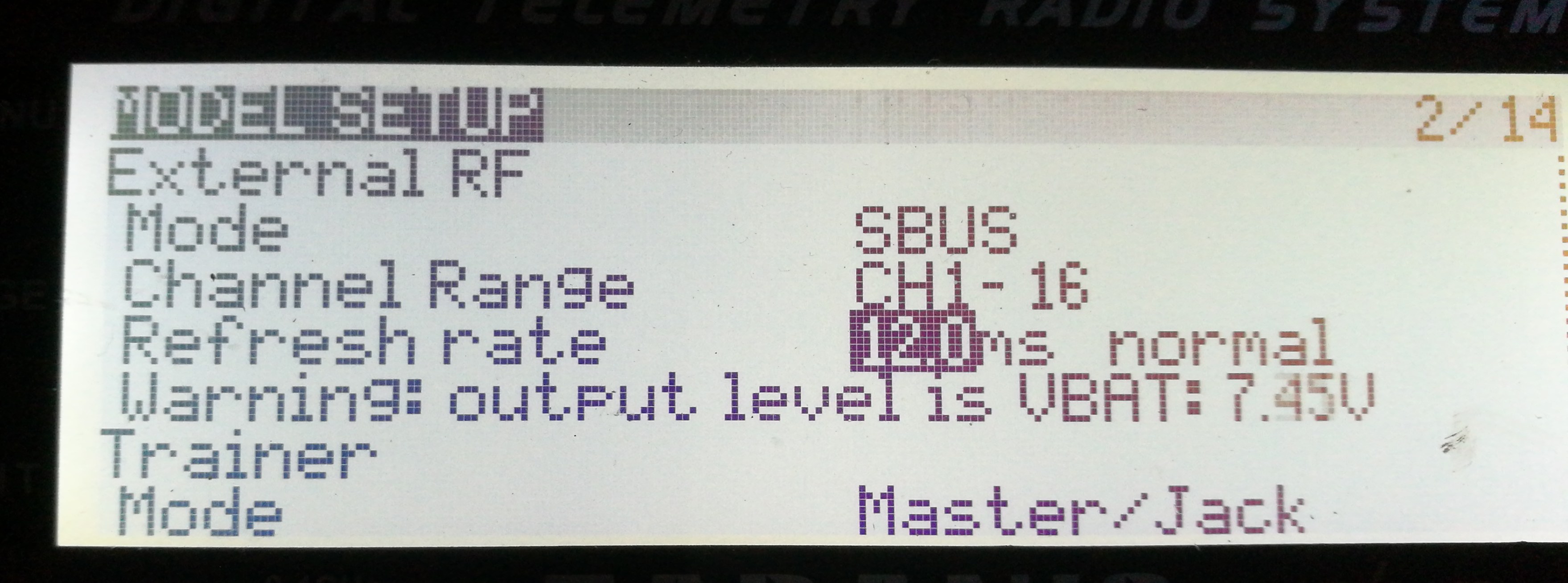
テスト:
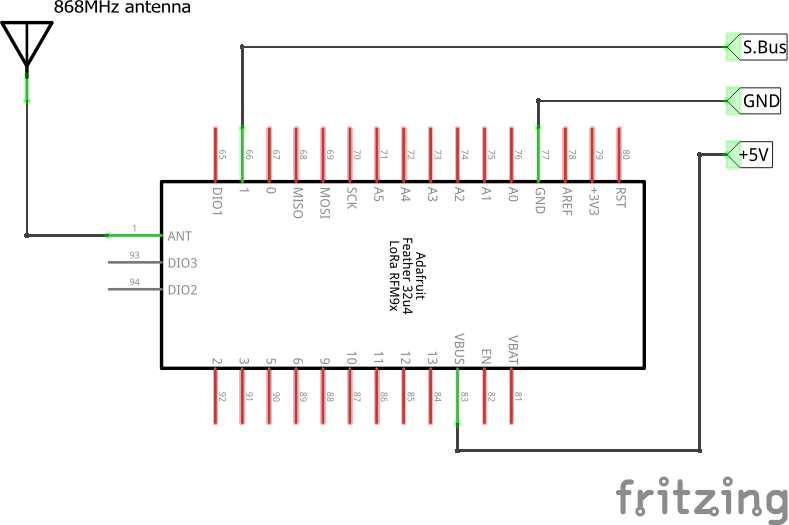
RXモジュールは、SBUSプロトコルを使用してRCデータを出力します。トリックは、DIY RXモジュールにはインバーターがないため、SBUS信号も反転していない(TTL標準)、標準のSBUSプロトコルは反転シリアル信号を使用したことです。
それは次のことを意味します:
TXとRXをフラッシュした後、バインディングが必要です。