QuadMeUp_Crossbow
1.0.0
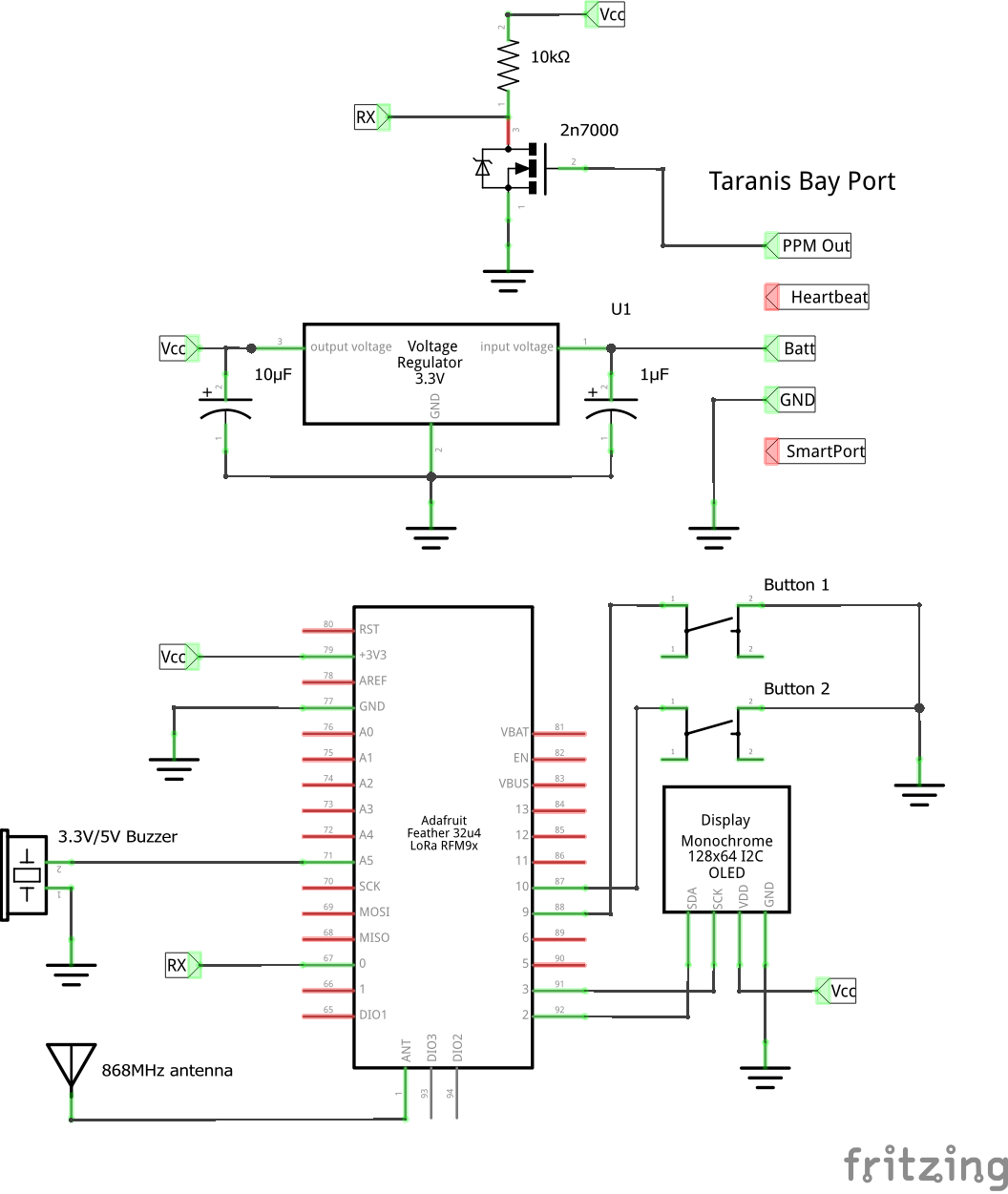
Quadmeup Crossbow 는 40 달러 미만의 가격으로 UAV (비행기 및 드론)에 대해 5km (적어도)의 RC 링크를 제공하는 DIY 프로젝트입니다. i는 Arduino 호환 보드에 연결된 SX1278 (LORA 868MHz/915MHz) 호환 (Heherf RFM95W 등) 라디오 모듈을 사용합니다. SPI를 통해 SX1278에 연결된 일반 Arduino 또는 Adafruit Feather 32U4 RFM LORA 또는 LORA32U4 II와 같은 전용 보드 일 수 있습니다.
향후 버전은 ESP32 LORA32 모듈로 포팅 될 수 있습니다.
공장:
구현 필요 :
컴파일하려면 다음 라이브러리를 설치해야합니다.
| 바이트 | 설명 | 메모 |
|---|---|---|
| 1 | 프레임 유형 및 중고 라디오 채널 | 비트 7-5는 프레임, 비트 4-0 전류 무선 채널을 정의합니다 |
| 2-33 | 유효 탑재량 | Lenghth는 프레임 유형으로 정의됩니다 |
| 페이로드 길이 + 2 | CRC | CRC8_DVB_S2 메소드 사용 |
CRC는 crc8_dvb_s2 방법을 사용하여 계산됩니다. 각 프레임 CRC에 대한 초기 CRC 값은 4 개의 결합 바이트 (송신기 모듈의 경우 고유)의 CRC와 같습니다.
| 값 | 가치 16 진 | 설명 | 방향 | 페이로드 길이 |
|---|---|---|---|---|
| 0000 | 0x0 | RC 채널 데이터 RC_DATA | tx-> rx | 9 |
| 0001 | 0x1 | 수신기 건강 및 기본 원격 측정 RX_HEALTH | rx-> tx | 6 |
| 0010 | 0x2 | 수신자 구성을 요청합니다 | tx-> rx | 사용되지 않습니다 |
| 0011 | 0x3 | 수신기 구성 | rx-> tx | 사용되지 않습니다 |
| 0100 | 0x4 | 수신기 구성을 설정합니다 | tx-> rx | 사용되지 않습니다 |
| 0101 | 0x5 | 핑 프레임은 9 바이트 페이로드를 사용합니다 | tx-> rx | 4 |
| 0110 | 0x6 | Pong 프레임, 핑과 동일한 페이로드 | rx-> tx | 4 |
| 0111 | 0x7 | 바인딩 동안 만 TX에 의해 전송되는 프레임 BIND | tx-> rx | 4 |
RC_DATA 프레임 형식프로토콜은 다음과 같이 인코딩 된 총 10 개의 RC 채널을 보낼 수 있습니다.
RC_DATA 페이로드의 총 길이는 9 바이트입니다
RX_HEALTH 프레임 형식| 바이트 | 설명 |
|---|---|
| 1 | RX RSSI |
| 2 | RX SNR |
| 3 | RX Supply Villatage, 0,1v로 전송되었습니다 |
| 4 | RX 아날로그 입력 1은 0,1V로 보냈습니다 |
| 5 | RX 아날로그 입력 2는 0,1V로 보냈습니다 |
| 6 | 깃발 |
| 조금 | 의미 |
|---|---|
| 00000001 | 실패 모드의 장치 |
PING 과 PONG 프레임 PING 및 PONG 프레임은 TX 와 RX 모듈 사이의 패킷 라운드 리프를 결정하는 것입니다. TX는 Curent micros 와 함께 PING 프레임을 보냅니다. RX가 PING 프레임을 수신하면 페이로드를 PONG 프레임으로 응답합니다.
BIND| 바이트 | 설명 |
|---|---|
| 1 | 키 바이트 0을 바인딩합니다 |
| 2 | 키 바이트 1 바인드 1 |
| 3 | 키 바이트 2 바인드 2 |
| 4 | 키 바이트 3 바인드 3 |
15 미만의 RSSI로 성공적인 비행을했습니다20 여야합니다.활성화 된 외부 RF SBU를 사용하려면 OPENTX 2.2.1 또는 최신 정보가 필요합니다.
SBUS1-1612.0ms 또는 14.0ms normal 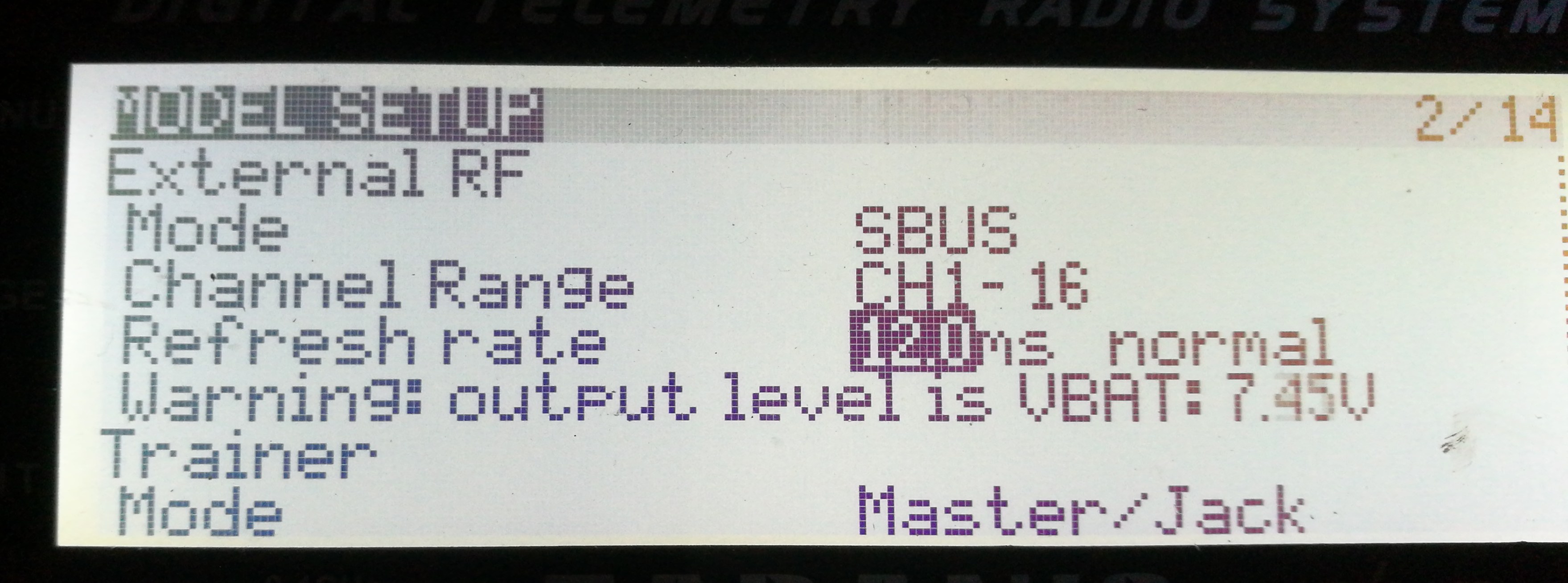
테스트 :
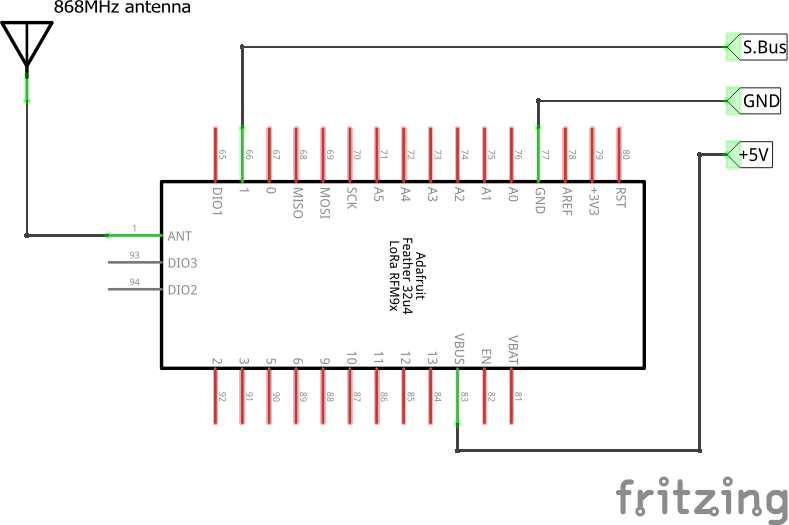
RX 모듈은 SBUS 프로토콜을 사용하여 RC 데이터를 출력합니다. 트릭은 DIY RX 모듈에 인버터가 없으므로 SBUS 신호도 반전되지 않고 (TTL 표준) 표준 SBUS 프로토콜을 반전 된 직렬 신호를 사용했습니다.
그것은 다음을 의미합니다.
TX 및 RX를 플래시 한 후 바인딩이 필요합니다.