KiteSimulators.jl
v0.4.1
Мета-пака, предоставляя «электроинструменты Julia Kite», состоящий из следующих пакетов:
Быстрый компьютер помогает сократить время установки, в противном случае он хорошо работает даже на двухъядерных компьютерах с 4G RAM, и 2G RAM может быть достаточным. OpenGL - это трудное требование. Выделенная графическая карта полезна, но не всегда требуется. Если у вас есть ноутбук Windows, пожалуйста, включите выделенную видеокарту в настройках.
Программа была протестирована с джойстиком «Logitech Extreme 3D Pro», но, скорее всего, любой джойстик подойдет. Если нет, пожалуйста, создайте проблему на GitHub. Установка была протестирована в Windows 10 и Ubuntu 18.04, 20.04, 22.04 и 24.04, но также должна работать на Mac.
Если у вас еще не установлена Джулия, пожалуйста, прочитайте установку.
Для установки этого пакета, пожалуйста, прочитайте установку Kitesimulators
Этот пакет предоставляет два приложения для графического интерфейса, которые могут использоваться неправограмм:
Первое приложение можно использовать для запуска одного из предоставленных демонстрационных симуляций, но вы также можете запустить собственное моделирование, копировав и изменяя файлы конфигурации.
Второе приложение можно использовать, чтобы научиться управлять воздушным змеем и как управлять лебедкой вручную, используя джойстик.
Из подсказки Julia refute:
using KiteSimulators
cp_examples ()Если у вас подключен джойстик, вы можете запустить симулятор с помощью управления джойстиком
./ bin / run_julia or bin run_julia
using KiteSimulators
include ( " examples/joystick.jl " ) # Linux
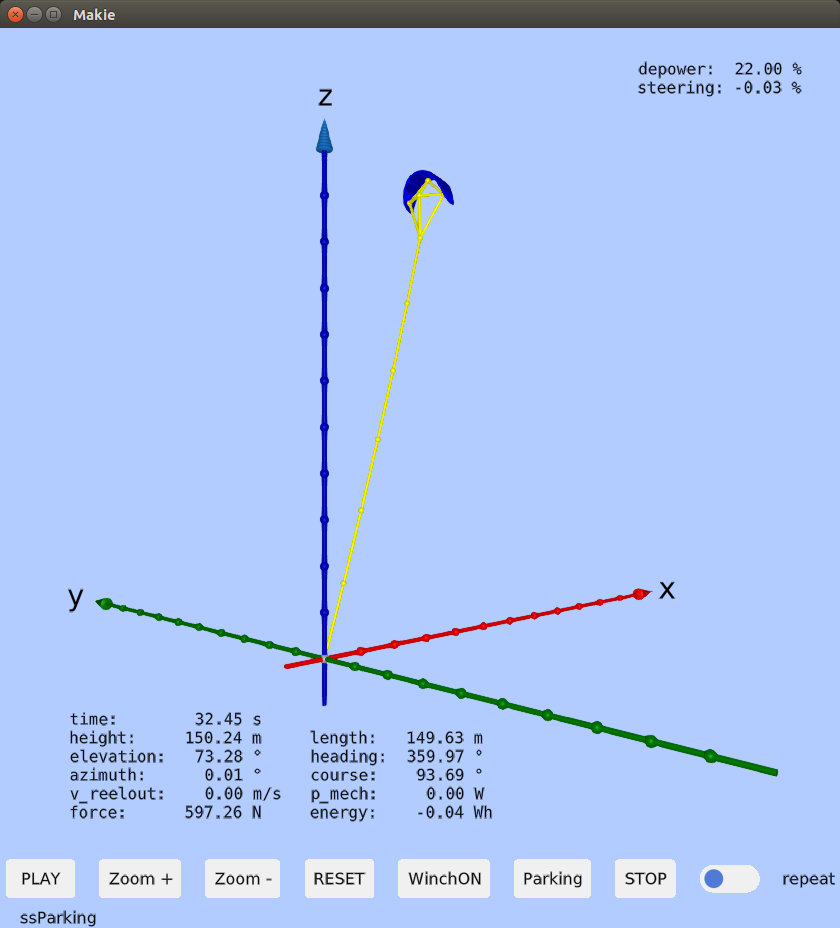
include ( " examples \ joystick.jl " ) # WindowsТеперь вы должны увидеть воздушный змей, прикрепленный к привязке:
Чтобы просмотреть и изменить пример, вы можете использовать команду:
edit ( " examples/joystick.jl " ) # Linux
edit ( " examples \ joystick.jl " ) # WindowsПодробности, как использовать этот пример, см. Джойстик.
Если у вас нет джойстика, попробуйте следующий пример:
./ bin / run_julia or bin run_julia
using KiteSimulators
include ( " examples/autopilot.jl " ) # Linux
include ( " examples \ autopilot.jl " ) # WindowsВы должны видеть, что автопилот начинается с 10 с и что он управляет полным циклом питания, воздушной змеи и лебедкой. Для получения подробной информации, как использовать этот пример, см. Autopilot.
Если вы выполняете:
using KiteSimulators
include ( " examples/menu.jl " )Вы получаете терминальное меню со всеми доступными примерами.
Следующая документация для программистов:
Большинство пакетов имеют свою собственную документацию. Смотрите, например:
и файлы readme других пакетов, перечисленных ниже.
Этот проект лицензирован по лицензии MIT. Пожалуйста, смотрите приведенный ниже отказ в связи с лицензией.
Technische Universiteit Delft настоящим отказывается от всех интересов авторского права к пакету «kitesimulators.jl» (симуляторы для систем ветроэнергетики воздуха), написанные автором (ы).
Профессор HGC (Анри) Виридж, декан аэрокосмической инженерии
Если вам нравится это программное обеспечение, пожалуйста, рассмотрите возможность пожертвования на https://gofund.me/508e041b.


