KiteSimulators.jl
v0.4.1
Meta-package, fournissant "Julia Kite Power Tools", composé des forfaits suivants:
Un ordinateur rapide contribue à réduire le temps d'installation, sinon il fonctionne bien même sur les ordinateurs doubles avec RAM 4G, et la RAM 2G pourrait être suffisante. OpenGL est une exigence difficile. Une carte graphique dédiée est utile, mais pas toujours requise. Si vous avez un ordinateur portable Windows, veuillez activer la carte graphique dédiée dans les paramètres.
Le programme a été testé avec un joystick "Logitech Extreme 3D Pro", mais très probablement tout joystick fera l'affaire. Sinon, veuillez créer un problème sur GitHub. L'installation a été testée sur Windows 10 et Ubuntu 18.04, 20.04, 22.04 et 24.04, mais devrait également fonctionner sur Mac.
Si vous n'avez pas encore installé Julia, veuillez lire l'installation.
Pour l'installation de ce package, veuillez lire l'installation de kitesimulators
Ce package fournit deux applications GUI qui peuvent être utilisées par les non-programmeurs:
La première application peut être utilisée pour exécuter l'une des simulations de démonstration fournies, mais vous pouvez également exécuter votre propre simulation en copiant et en modifiant les fichiers de configuration.
La deuxième application peut être utilisée pour apprendre à diriger un cerf-volant et à faire fonctionner le treuil manuellement en utilisant un joystick.
De l'invite de Julia Exécuter:
using KiteSimulators
cp_examples ()Si vous avez un joystick connecté, vous pouvez exécuter le simulateur avec un contrôle de joystick
./ bin / run_julia or bin run_julia
using KiteSimulators
include ( " examples/joystick.jl " ) # Linux
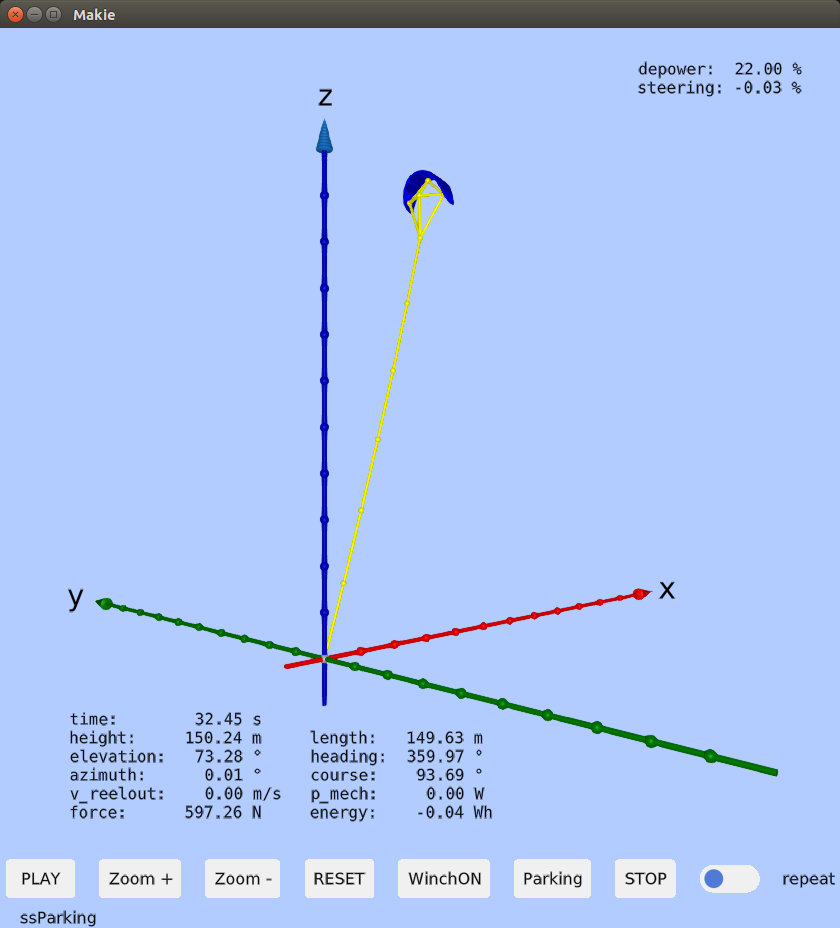
include ( " examples \ joystick.jl " ) # WindowsVous devriez maintenant voir le cerf-volant attaché à l'attache:
Pour afficher et modifier l'exemple, vous pouvez utiliser la commande:
edit ( " examples/joystick.jl " ) # Linux
edit ( " examples \ joystick.jl " ) # WindowsPour plus de détails, comment utiliser cet exemple, voir Joystick.
Si vous n'avez pas de joystick, essayez l'exemple suivant:
./ bin / run_julia or bin run_julia
using KiteSimulators
include ( " examples/autopilot.jl " ) # Linux
include ( " examples \ autopilot.jl " ) # WindowsVous devriez voir que le pilote automatique commence à 10 s et qu'il contrôle le cycle complet, le cerf-volant et le treuil. Pour plus de détails, comment utiliser cet exemple, voir le pilote automatique.
Si vous exécutez:
using KiteSimulators
include ( " examples/menu.jl " )Vous obtenez un menu Terminal avec tous les exemples disponibles.
La documentation suivante concerne les programmeurs:
La plupart des packages ont leur propre documentation. Voir par exemple:
et les fichiers ReadMe des autres packages, énumérés ci-dessous.
Ce projet est autorisé sous la licence du MIT. Veuillez consulter la renonciation ci-dessous en association avec la licence.
Technische Universiteit Delft décline tous les intérêts du droit d'auteur dans le package «kitesimulators.jl» (simulateurs pour les systèmes d'énergie éolienne aéroportés) écrits par l'auteur.
Prof.Dr. HGC (Henri) Werij, doyen de l'ingénierie aérospatiale
Si vous aimez ce logiciel, veuillez envisager de faire un don à https://gofund.me/508e041b.


