KiteSimulators.jl
v0.4.1
다음 패키지로 구성된 "Julia Kite 전동 공구"제공 메타 패키지 :
빠른 컴퓨터는 설치 시간을 줄이는 데 도움이됩니다. 그렇지 않으면 4G RAM이있는 듀얼 코어 컴퓨터에서도 잘 작동하며 2G RAM이 충분할 수 있습니다. OpenGL은 어려운 요구 사항입니다. 전용 그래픽 카드는 유용하지만 항상 필요한 것은 아닙니다. Windows 노트북이있는 경우 설정에서 전용 그래픽 카드를 활성화하십시오.
이 프로그램은 "Logitech Extreme 3D Pro"조이스틱으로 테스트되었지만 대부분의 조이스틱은 가능할 것입니다. 그렇지 않다면 Github에서 문제를 만들어주세요. 설치는 Windows 10 및 Ubuntu 18.04, 20.04, 22.04 및 24.04에서 테스트되었지만 Mac에서도 작동해야합니다.
Julia가 아직 설치되지 않은 경우 설치를 읽으십시오.
이 패키지를 설치하려면 Kitesimulators 설치를 읽으십시오.
이 패키지는 비 프로그램 제가 사용할 수있는 두 가지 GUI 응용 프로그램을 제공합니다.
첫 번째 앱은 제공된 데모 시뮬레이션 중 하나를 실행하는 데 사용할 수 있지만 구성 파일을 복사하고 수정하여 고유 한 시뮬레이션을 실행할 수도 있습니다.
두 번째 앱은 연을 조종하는 방법과 조이스틱을 사용하여 수동으로 윈치를 작동하는 방법을 배우는 데 사용될 수 있습니다.
Julia Prompt Execute에서 :
using KiteSimulators
cp_examples ()조이스틱이 연결되어 있으면 조이스틱 제어로 시뮬레이터를 실행할 수 있습니다.
./ bin / run_julia or bin run_julia
using KiteSimulators
include ( " examples/joystick.jl " ) # Linux
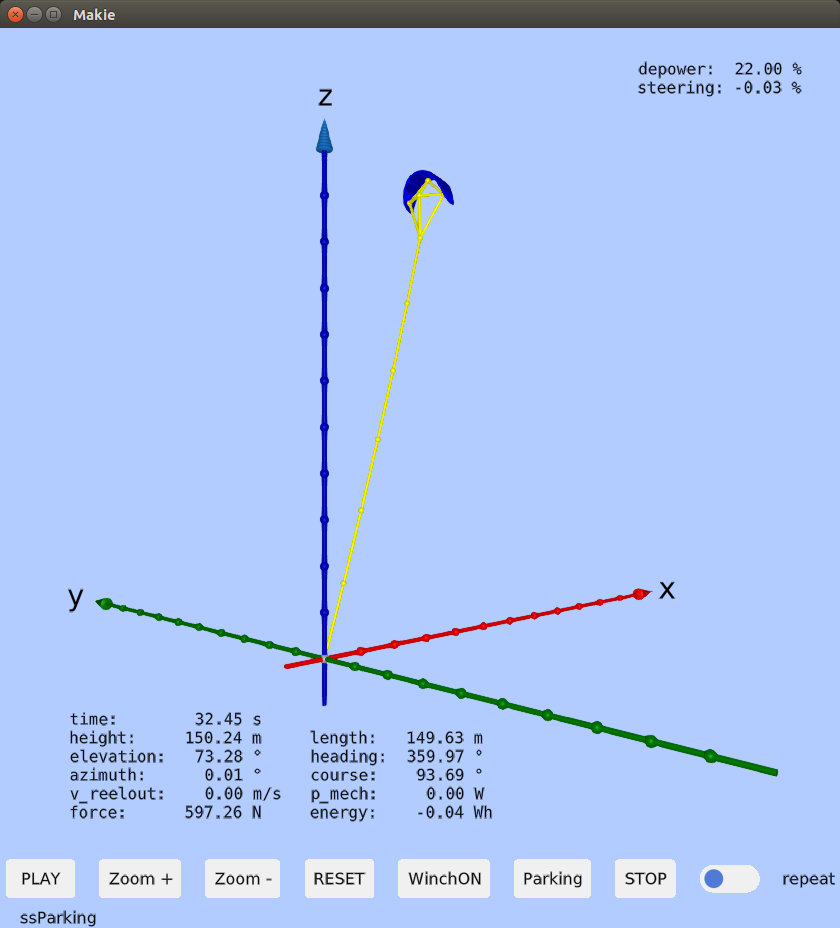
include ( " examples \ joystick.jl " ) # Windows당신은 이제 밧줄에 붙어있는 연을 볼 수 있어야합니다.
예제를보고 수정하려면 다음 명령을 사용할 수 있습니다.
edit ( " examples/joystick.jl " ) # Linux
edit ( " examples \ joystick.jl " ) # Windows이 예를 사용하는 방법은 조이스틱을 참조하십시오.
조이스틱이없는 경우 다음 예를 시도하십시오.
./ bin / run_julia or bin run_julia
using KiteSimulators
include ( " examples/autopilot.jl " ) # Linux
include ( " examples \ autopilot.jl " ) # Windows자동 조종 장치는 10 초에서 시작하여 전체 전력주기, 연 및 윈치를 제어하고 있음을 알 수 있습니다. 이 예를 사용하는 방법은 자동 조종 장치를 참조하십시오.
실행하는 경우 :
using KiteSimulators
include ( " examples/menu.jl " )사용 가능한 모든 예제가 포함 된 터미널 메뉴가 나타납니다.
다음 문서는 프로그래머를위한 것입니다.
대부분의 패키지에는 자체 문서가 있습니다. 예를 들어 : 참조 :
아래에 나열된 다른 패키지의 readme 파일.
이 프로젝트는 MIT 라이센스에 따라 라이센스가 부여됩니다. 라이센스와 관련하여 아래 면제를 참조하십시오.
Technische Universiteit Delft는 저자가 작성한“kitesimulators.jl”(Airborne Wind Energy Systems의 시뮬레이터)에 대한 모든 저작권 관심을 부인합니다.
교수 항공 우주 공학 학장 HGC (Henri) Werij
이 소프트웨어가 마음에 들면 https://gofund.me/508e041b에 기부하는 것을 고려하십시오.


