DnCNN
1.0.0
Noticias: Drunet
Rendimiento de descenso de última generación
Se puede usar para la restauración de imágenes con plug-and-play

https://github.com/cszn/dpir/blob/master/main_dpir_denoising.py
I recommend to use the PyTorch code for training and testing. The model parameters of MatConvnet and PyTorch are same.
main_train_dncnn.py
main_test_dncnn.py
main_test_dncnn3_deblowing.py
import torch
import torch . nn as nn
def merge_bn ( model ):
''' merge all 'Conv+BN' (or 'TConv+BN') into 'Conv' (or 'TConv')
based on https://github.com/pytorch/pytorch/pull/901
by Kai Zhang ([email protected])
https://github.com/cszn/DnCNN
01/01/2019
'''
prev_m = None
for k , m in list ( model . named_children ()):
if ( isinstance ( m , nn . BatchNorm2d ) or isinstance ( m , nn . BatchNorm1d )) and ( isinstance ( prev_m , nn . Conv2d ) or isinstance ( prev_m , nn . Linear ) or isinstance ( prev_m , nn . ConvTranspose2d )):
w = prev_m . weight . data
if prev_m . bias is None :
zeros = torch . Tensor ( prev_m . out_channels ). zero_ (). type ( w . type ())
prev_m . bias = nn . Parameter ( zeros )
b = prev_m . bias . data
invstd = m . running_var . clone (). add_ ( m . eps ). pow_ ( - 0.5 )
if isinstance ( prev_m , nn . ConvTranspose2d ):
w . mul_ ( invstd . view ( 1 , w . size ( 1 ), 1 , 1 ). expand_as ( w ))
else :
w . mul_ ( invstd . view ( w . size ( 0 ), 1 , 1 , 1 ). expand_as ( w ))
b . add_ ( - m . running_mean ). mul_ ( invstd )
if m . affine :
if isinstance ( prev_m , nn . ConvTranspose2d ):
w . mul_ ( m . weight . data . view ( 1 , w . size ( 1 ), 1 , 1 ). expand_as ( w ))
else :
w . mul_ ( m . weight . data . view ( w . size ( 0 ), 1 , 1 , 1 ). expand_as ( w ))
b . mul_ ( m . weight . data ). add_ ( m . bias . data )
del model . _modules [ k ]
prev_m = m
merge_bn ( m )
def tidy_sequential ( model ):
for k , m in list ( model . named_children ()):
if isinstance ( m , nn . Sequential ):
if m . __len__ () == 1 :
model . _modules [ k ] = m . __getitem__ ( 0 )
tidy_sequential ( m )Versión simple
Versión de Dagnn
[Demos] Demo_test_DnCNN-.m .
[modelos] incluyendo los modelos entrenados para la renovación gaussiana; Un solo modelo para la denoización gaussiana, la super resolución de una sola imagen (SISR) y el desbloqueo.
[TestSets] BSD68 y SET10 para la evaluación gaussiana de desociones; SET5, SET14, BSD100 y URBAN100 DATASTS conjuntos para evaluación SISR; Classic5 y Live1 para JPEG Image Desbloking Evaluation.
He entrenado nuevos modelos DNCNN (FDNCNN) flexibles basados en FFDNET.
FDNCNN puede manejar el rango de nivel de ruido de [0, 75] a través de un solo modelo.
Demo_fdncnn_gray.m
Demo_fdncnn_gray_clip.m
Demo_fdncnn_color.m
Demo_fdncnn_color_clip.m
Arquitectura de red
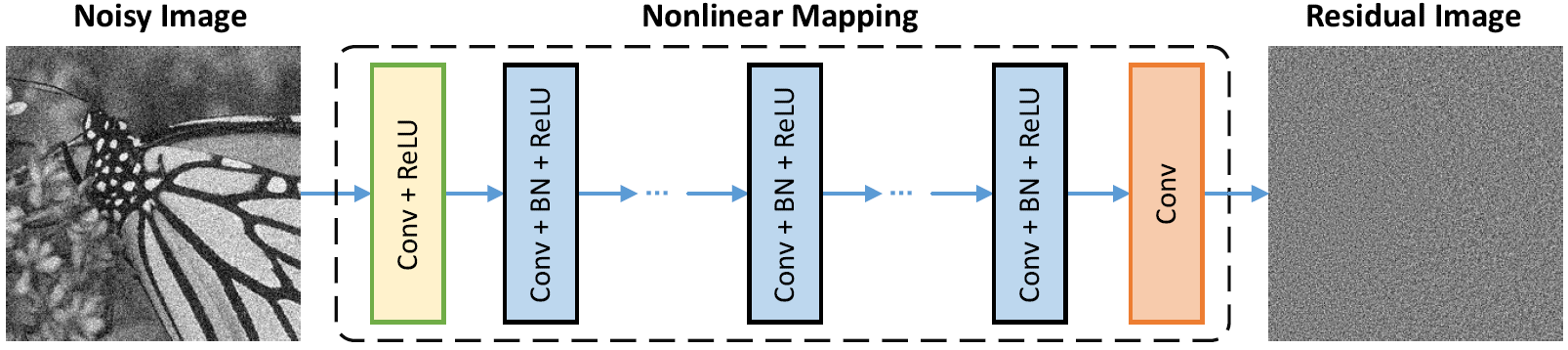
La normalización por lotes y el aprendizaje residual son beneficiosos para la renovación gaussiana (especialmente para un solo nivel de ruido). El residuo de una imagen ruidosa corrompida por el ruido gaussiano blanco aditivo (AWGN) sigue una distribución gaussiana constante que estabiliza la normalización por lotes durante el entrenamiento.
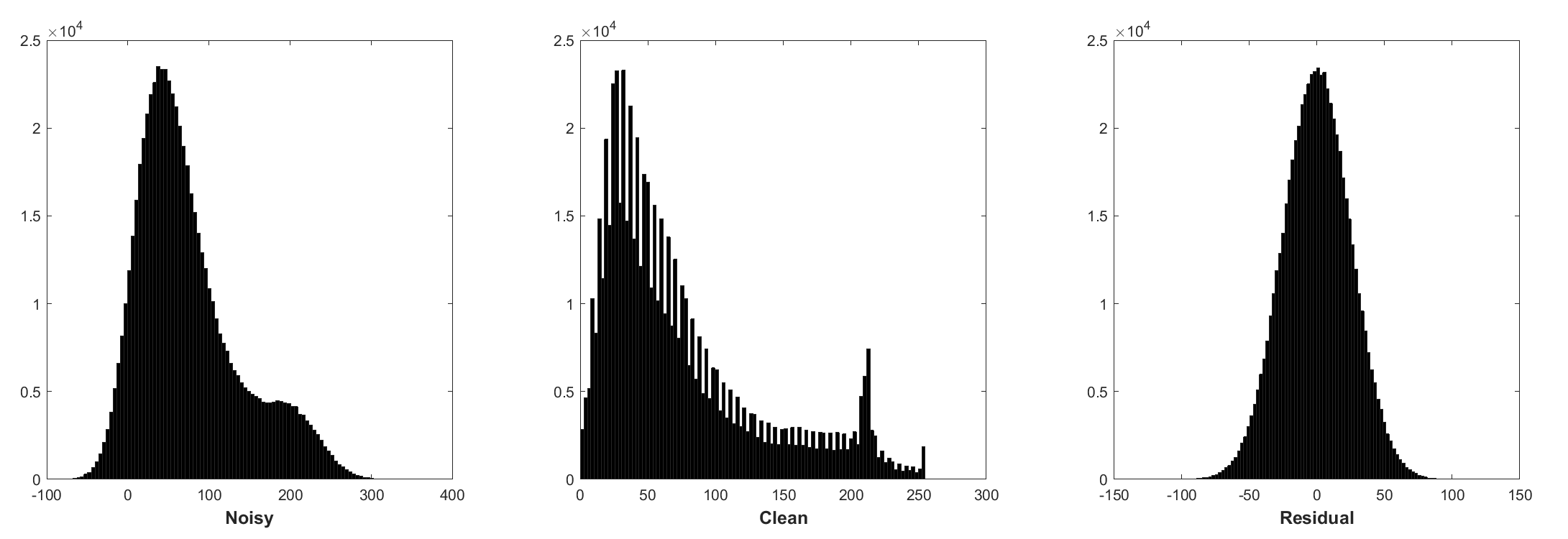
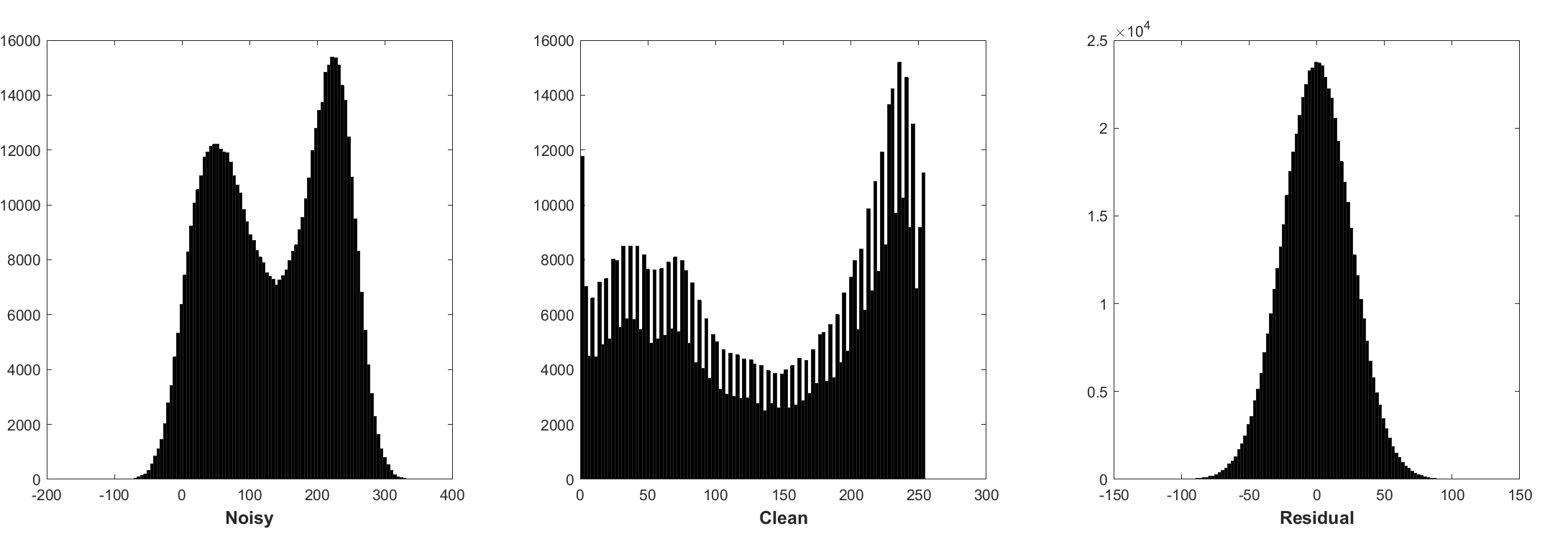
La predicción del residual puede interpretarse como una realización de inferencia de descenso de gradiente en el punto de partida (es decir, imagen ruidosa).
Los parámetros en DNCNN representan principalmente los antecedentes de la imagen (independientes de la tarea), por lo tanto, es posible aprender un modelo único para diferentes tareas, como la cenanización de imágenes, la súper resolución de la imagen y el desbloqueo de imágenes JPEG.
La izquierda es la imagen de entrada corrompida por diferentes degradaciones, la derecha es la imagen restaurada por DNCNN-3.


Los resultados promedio de PSNR (DB) de diferentes métodos en el conjunto de datos BSD68.
| Nivel de ruido | BM3D | WNNM | EPLL | MLP | CSF | TNRD | Dncnn | Dncnn-b | Fdncnn | Drunet |
|---|---|---|---|---|---|---|---|---|---|---|
| 15 | 31.07 | 31.37 | 31.21 | - | 31.24 | 31.42 | 31.73 | 31.61 | 31.69 | 31.91 |
| 25 | 28.57 | 28.83 | 28.68 | 28.96 | 28.74 | 28.92 | 29.23 | 29.16 | 29.22 | 29.48 |
| 50 | 25.62 | 25.87 | 25.67 | 26.03 | - | 25.97 | 26.23 | 26.23 | 26.27 | 26.59 |
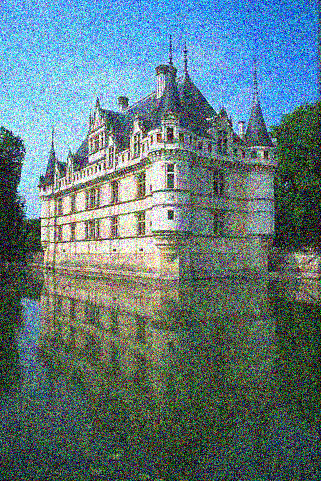
Resultados visuales
La izquierda es la imagen ruidosa corrompida por AWGN, el medio es la imagen denocada de DNCNN, la derecha es la verdad en tierra.








Resultados promedio de PSNR (DB)/SSIM de diferentes métodos para la renovación gaussiana con el nivel de ruido 15, 25 y 50 en el conjunto de datos BSD68, la súper resolución de la imagen única con factores de escala 2, 3 y 40 en SET5, SET14, BSD100 y conjuntos de datos Urban100, imagen de imagen JPEG con factores de calidad 10, 20 y 40 en los datos clásicos de clásicos5 y vivos11.
| Conjunto de datos | Nivel de ruido | BM3D | TNRD | DNCNN-3 |
|---|---|---|---|---|
| 15 | 31.08 / 0.8722 | 31.42 / 0.8826 | 31.46 / 0.8826 | |
| BSD68 | 25 | 28.57 / 0.8017 | 28.92 / 0.8157 | 29.02 / 0.8190 |
| 50 | 25.62 / 0.6869 | 25.97 / 0.7029 | 26.10 / 0.7076 |
| Conjunto de datos | Factor de mejora | TNRD | VDSR | DNCNN-3 |
|---|---|---|---|---|
| 2 | 36.86 / 0.9556 | 37.56 / 0.9591 | 37.58 / 0.9590 | |
| Set5 | 3 | 33.18 / 0.9152 | 33.67 / 0.9220 | 33.75 / 0.9222 |
| 4 | 30.85 / 0.8732 | 31.35 / 0.8845 | 31.40 / 0.8845 | |
| 2 | 32.51 / 0.9069 | 33.02 / 0.9128 | 33.03 / 0.9128 | |
| Set14 | 3 | 29.43 / 0.8232 | 29.77 / 0.8318 | 29.81 / 0.8321 |
| 4 | 27.66 / 0.7563 | 27.99 / 0.7659 | 28.04 / 0.7672 | |
| 2 | 31.40 / 0.8878 | 31.89 / 0.8961 | 31.90 / 0.8961 | |
| BSD100 | 3 | 28.50 / 0.7881 | 28.82 / 0.7980 | 28.85 / 0.7981 |
| 4 | 27.00 / 0.7140 | 27.28 / 0.7256 | 27.29 / 0.7253 | |
| 2 | 29.70 / 0.8994 | 30.76 / 0.9143 | 30.74 / 0.9139 | |
| Urbano100 | 3 | 26.42 / 0.8076 | 27.13 / 0.8283 | 27.15 / 0.8276 |
| 4 | 24.61 / 0.7291 | 25.17 / 0.7528 | 25.20 / 0.7521 |
| Conjunto de datos | Factor de calidad | AR-CNN | TNRD | DNCNN-3 |
|---|---|---|---|---|
| Classic5 | 10 | 29.03 / 0.7929 | 29.28 / 0.7992 | 29.40 / 0.8026 |
| 20 | 31.15 / 0.8517 | 31.47 / 0.8576 | 31.63 / 0.8610 | |
| 30 | 32.51 / 0.8806 | 32.78 / 0.8837 | 32.91 / 0.8861 | |
| 40 | 33.34 / 0.8953 | - | 33.77 / 0.9003 | |
| Live1 | 10 | 28.96 / 0.8076 | 29.15 / 0.8111 | 29.19 / 0.8123 |
| 20 | 31.29 / 0.8733 | 31.46 / 0.8769 | 31.59 / 0.8802 | |
| 30 | 32.67 / 0.9043 | 32.84 / 0.9059 | 32.98 / 0.9090 | |
| 40 | 33.63 / 0.9198 | - | 33.96 / 0.9247 |
O simplemente MATLAB R2015B para probar el modelo.
Dncnn/demo_test_dncnn.m
Líneas 64 a 65 en 4A4B5B8
@article { zhang2017beyond ,
title = { Beyond a {Gaussian} denoiser: Residual learning of deep {CNN} for image denoising } ,
author = { Zhang, Kai and Zuo, Wangmeng and Chen, Yunjin and Meng, Deyu and Zhang, Lei } ,
journal = { IEEE Transactions on Image Processing } ,
year = { 2017 } ,
volume = { 26 } ,
number = { 7 } ,
pages = { 3142-3155 } ,
}
@article { zhang2020plug ,
title = { Plug-and-Play Image Restoration with Deep Denoiser Prior } ,
author = { Zhang, Kai and Li, Yawei and Zuo, Wangmeng and Zhang, Lei and Van Gool, Luc and Timofte, Radu } ,
journal = { arXiv preprint } ,
year = { 2020 }
}=========================================================================================================
@Inbook{zuo2018convolutional,
author={Zuo, Wangmeng and Zhang, Kai and Zhang, Lei},
editor={Bertalm{'i}o, Marcelo},
title={Convolutional Neural Networks for Image Denoising and Restoration},
bookTitle={Denoising of Photographic Images and Video: Fundamentals, Open Challenges and New Trends},
year={2018},
publisher={Springer International Publishing},
address={Cham},
pages={93--123},
isbn={978-3-319-96029-6},
doi={10.1007/978-3-319-96029-6_4},
url={https://doi.org/10.1007/978-3-319-96029-6_4}
}
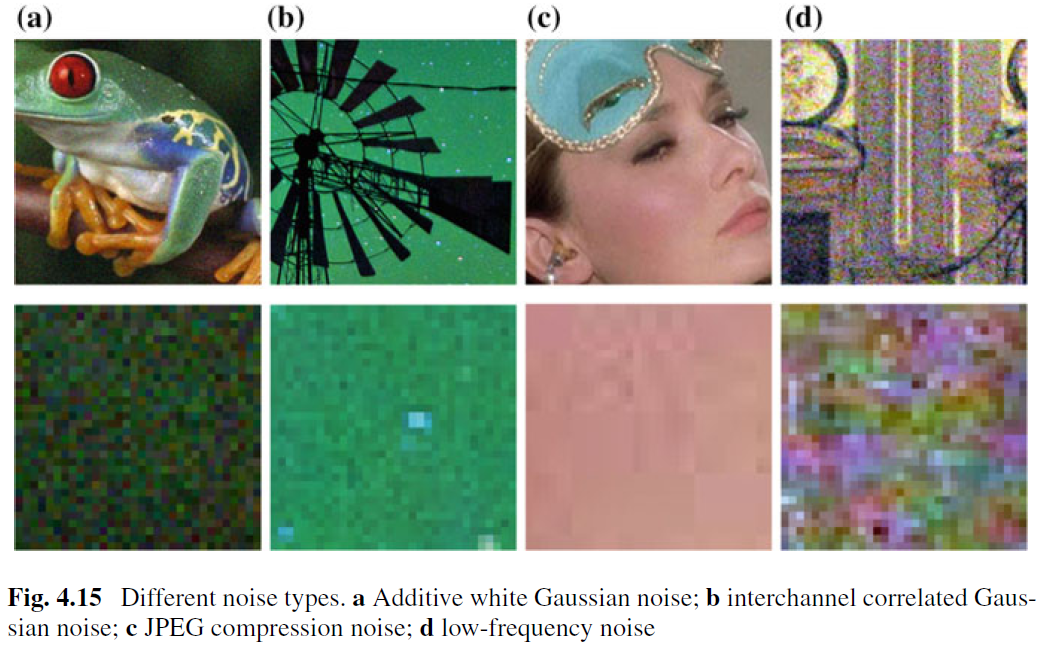
Si bien la imagen de la eliminación de la imagen para la eliminación de AWGN ha sido bien estudiada, se ha trabajado poco en la renovación de imágenes reales. La principal dificultad surge del hecho de que los ruidos reales son mucho más complejos que AWGN y no es una tarea fácil evaluar a fondo el rendimiento de un Denoiser. La figura 4.15 muestra cuatro tipos de ruido típicos en el mundo real. Se puede ver que las características de esos ruidos son muy diferentes y un solo nivel de ruido puede no ser suficiente para parametrizar esos tipos de ruido. En la mayoría de los casos, un Denoiser solo puede funcionar bien bajo un cierto modelo de ruido. Por ejemplo, un modelo de renovación entrenado para la eliminación de AWGN no es efectivo para la eliminación de ruido de Gausson y Poisson mixto. Esto es intuitivamente razonable porque los métodos basados en CNN pueden tratarse como un caso general de la ecuación. (4.3) y el importante término de fidelidad de datos corresponde al proceso de degradación. A pesar de esto, la imagen que se deneización para la eliminación de AWGN es valiosa debido a las siguientes razones. Primero, es un lecho de prueba ideal para evaluar la efectividad de los diferentes métodos de renovación basados en CNN. En segundo lugar, en la inferencia desenrollada a través de técnicas de división variable, se pueden abordar muchos problemas de restauración de imágenes resolviendo secuencialmente una serie de subproblemas de renovación gaussiana, que amplía aún más los campos de aplicación.
Para mejorar la práctica de un Denoiser de CNN, quizás la forma más directa es capturar cantidades adecuadas de pares de entrenamiento ruidosos reales para el entrenamiento para que el espacio de degradación real pueda estar cubierto. Esta solución tiene la ventaja de que no hay necesidad de conocer el complejo proceso de degradación. Sin embargo, derivar la imagen limpia correspondiente de una ruidosa no es una tarea trivial debido a la necesidad de cuidadosos pasos posteriores al procesamiento, como la alineación espacial y la corrección de iluminación. Alternativamente, se puede simular el proceso de degradación real para sintetizar imágenes ruidosas para una limpia. Sin embargo, no es fácil modelar con precisión el proceso de degradación complejo. En particular, el modelo de ruido puede ser diferente en diferentes cámaras. Sin embargo, es prácticamente preferible modelar aproximadamente un cierto tipo de ruido para el entrenamiento y luego usar el modelo CNN aprendido para la renovación específica de tipo.
Además de los datos de capacitación, la arquitectura robusta y la capacitación robusta también juegan roles vitales para el éxito de un Denoiser de CNN. Para la arquitectura robusta, diseñar un CNN multiescala profundo que implica un procedimiento grueso a fines es una dirección prometedora. Se espera que dicha red hereda los méritos de la multiescala: (i) el nivel de ruido disminuye a escalas más grandes; (ii) el ruido ubicuo de baja frecuencia puede aliviarse mediante procedimiento multiescala; y (iii) reducción de muestras de la imagen antes de la renovación puede ampliar efectivamente el receptivo archivado. Para la sólida capacitación, la efectividad del Denoiser entrenado con redes adversas generativas (GaN) para la renovación de imágenes reales sigue siendo una mayor investigación. La idea principal de Denoising basado en GaN es introducir una pérdida de adversaria para mejorar la calidad perceptiva de la imagen de Denoiseed. Además, una ventaja distintiva de GaN es que puede hacer un aprendizaje sin supervisión. Más específicamente, la imagen ruidosa sin verdad en tierra se puede usar en el entrenamiento. Hasta ahora, hemos proporcionado varias soluciones posibles para mejorar la práctica de un Denoiser CNN. Debemos tener en cuenta que esas soluciones se pueden combinar para mejorar aún más el rendimiento.


