telemetry system
1.0.0
นี่เป็นโครงการสำหรับการส่ง telemetry สำหรับบอลลูนจรวดและสิ่งอื่น ๆ ที่สามารถบินได้สูง
โครงการประกอบด้วย:
นี่คือโมดูลที่มีหนึ่ง PCB:
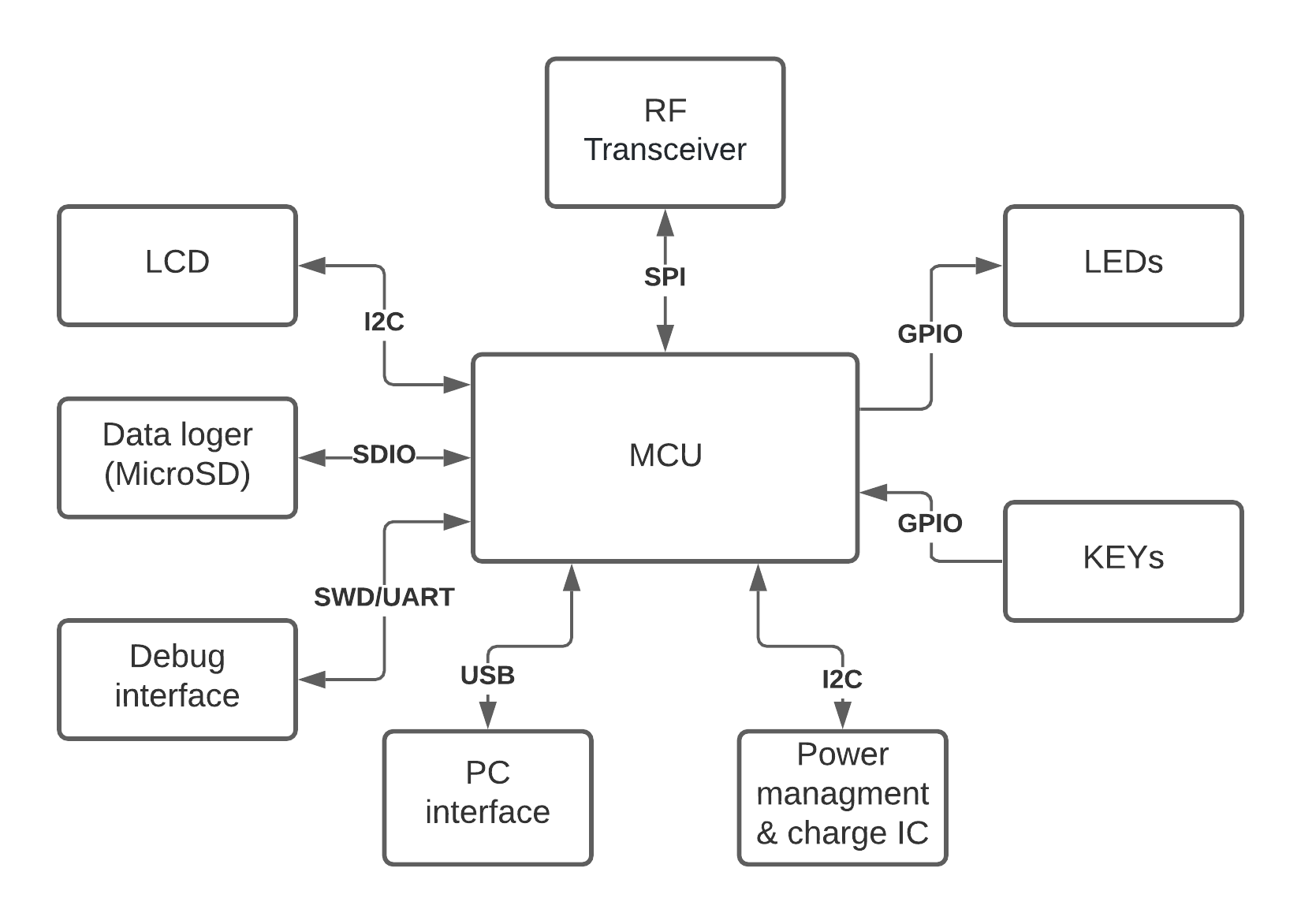
การแสดงผลมีความจำเป็นเพียงเพื่อแสดงข้อมูลบริการเท่านั้น telemetry ทั้งหมดจะถูกส่งไปยังพีซีผ่าน USB เพื่อแสดง telemetry ในแอปพลิเคชัน GUI การส่งคำสั่งควบคุมสำหรับจรวด
สำหรับรายละเอียดโปรดดู Wiki - สถานีภาคพื้นดิน (RX)
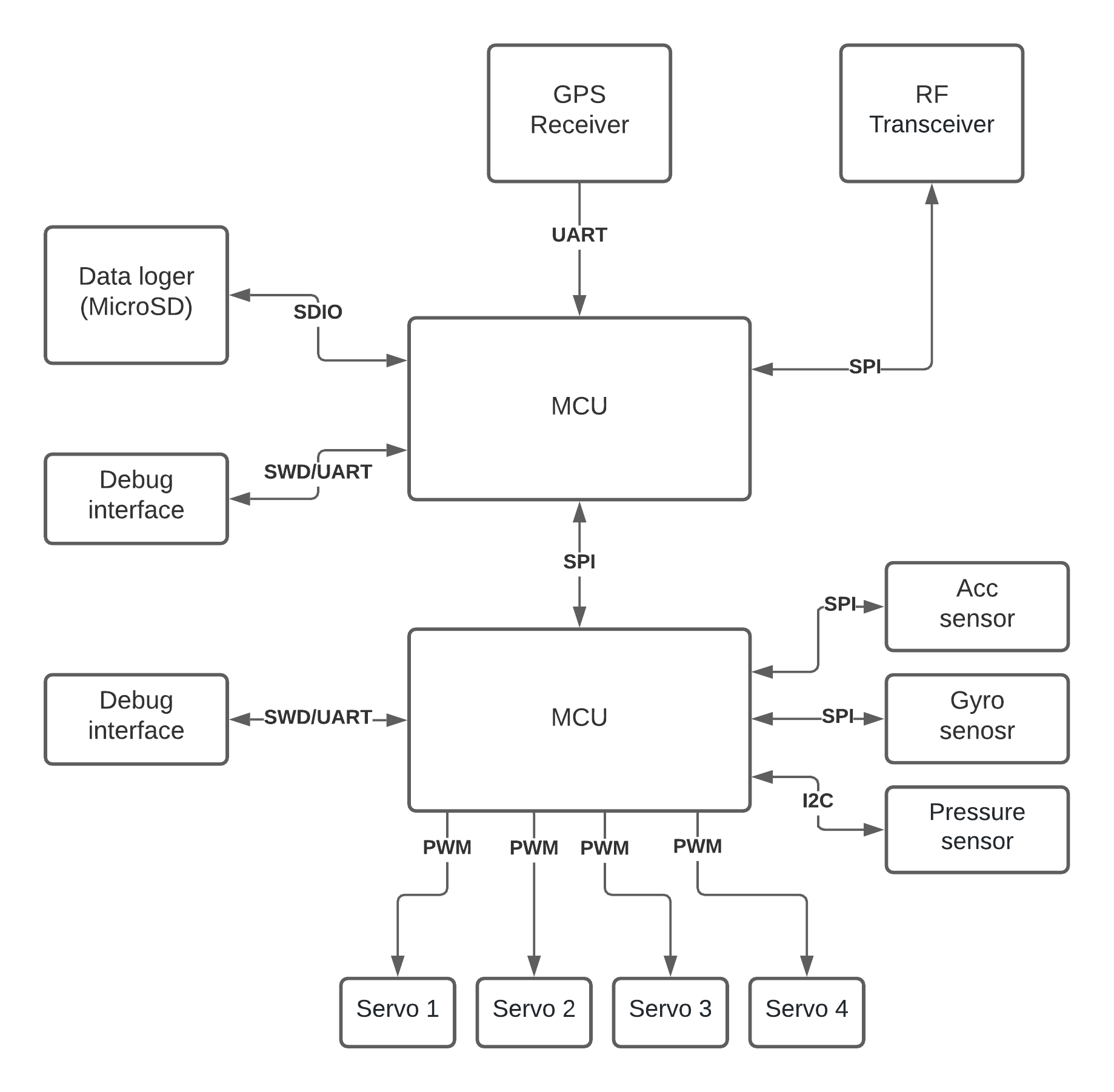
นี่คือโมดูลที่มีโมดูล PCB แยกต่างหากเพื่อความสามารถในการปรับขนาด:
สำหรับรายละเอียดโปรดดู Wiki - โมดูลการส่ง (RX)
เพื่อที่จะไม่สร้าง "วงล้อ" ใหม่โปรโตคอล UBX ถูกนำมาเป็นพื้นฐานและง่ายขึ้นสำหรับข้อกำหนดปัจจุบัน:
ความเรียบง่าย
ความยืดหยุ่น
ข้อความสั้น ๆ เพื่อลดเวลาแฝงอากาศ
ในโปรโตคอลไม่รวม ACK และ NAK - เนื่องจากนี่เป็นค่าใช้จ่ายในเวลาถ้าพัสดุไม่ได้รับจากสถานีภาคพื้นดินมันก็โอเคเราจะได้รับข้อความต่อไป แต่จะไม่เสียเวลาส่งแพ็คเกจ: "ความสำเร็จที่ได้รับ"
ประกอบด้วยหกช่วงตึกดังที่แสดงในภาพ
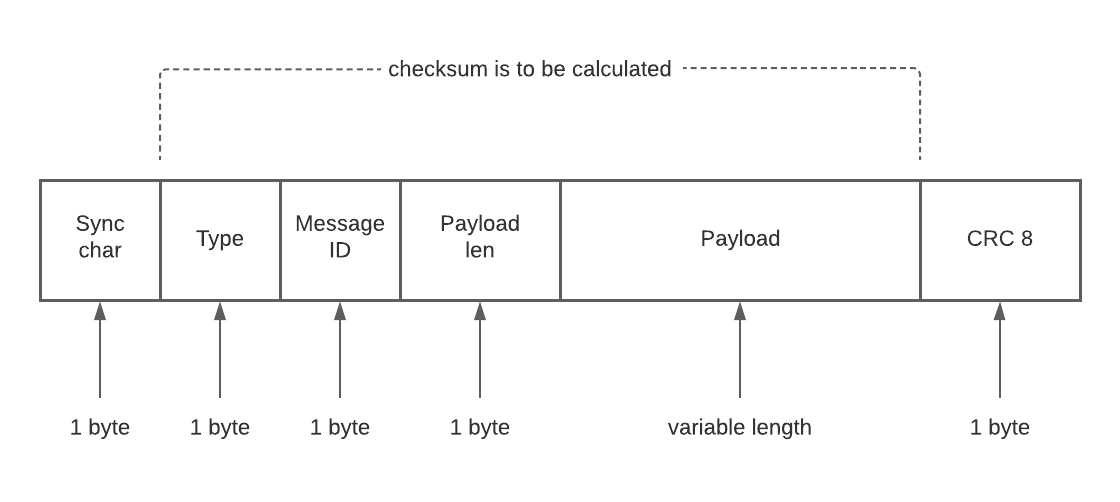
คุณสามารถอ่านข้อมูลเพิ่มเติมได้ที่นี่หน้า wiki - ข้อมูลจำเพาะโปรโตคอล
ขึ้นอยู่กับ: gcc-arm-none-eabi cmake
mkdir build
cd build
cmake -DBUILD=GROUND_STATION ..
make -j
make clean
cmake -DBUILD=TX_MODULE ..
make -j
make clean
cmake -DBUILD=SERVO_MODULE ..
make -j
TODO: ต้องการอัปเดต
สำหรับแฟลชผ่าน USB ต้องการใช้ dfu-util - อุปกรณ์อัพเกรดเฟิร์มแวร์อุปกรณ์
ติดตั้งสำหรับ Ubuntu
sudo apt install dfu-util
ติดตั้งสำหรับ macOS
brew install dfu-util
หรือสร้างจากไฟล์ต้นฉบับ
https://github.com/siemens/dfu-util
ตัวอย่างของแฟลช: dfu-util -a 0 -s 0x08000000:leave -D your_firmware.bin
หรือใช้คำสั่ง make flash หลังจากสร้างเฟิร์มแวร์
เปิดรุ่นรุ่น
ซอฟต์แวร์นี้เป็น โอเพ่นซอร์ส และให้บริการฟรีโดยไม่รับประกันผู้ใช้ทุกคน
ขอบคุณมากสำหรับผู้มีส่วนร่วมในปัจจุบัน:
*เอกสารจะได้รับการอัปเดตเมื่อโครงการพัฒนาขึ้น


