telemetry system
1.0.0
これは、バルーン、ロケット、および高く飛ぶ可能性のあるもののテレメトリを送信するプロジェクトです。
プロジェクトは次のとおりです。
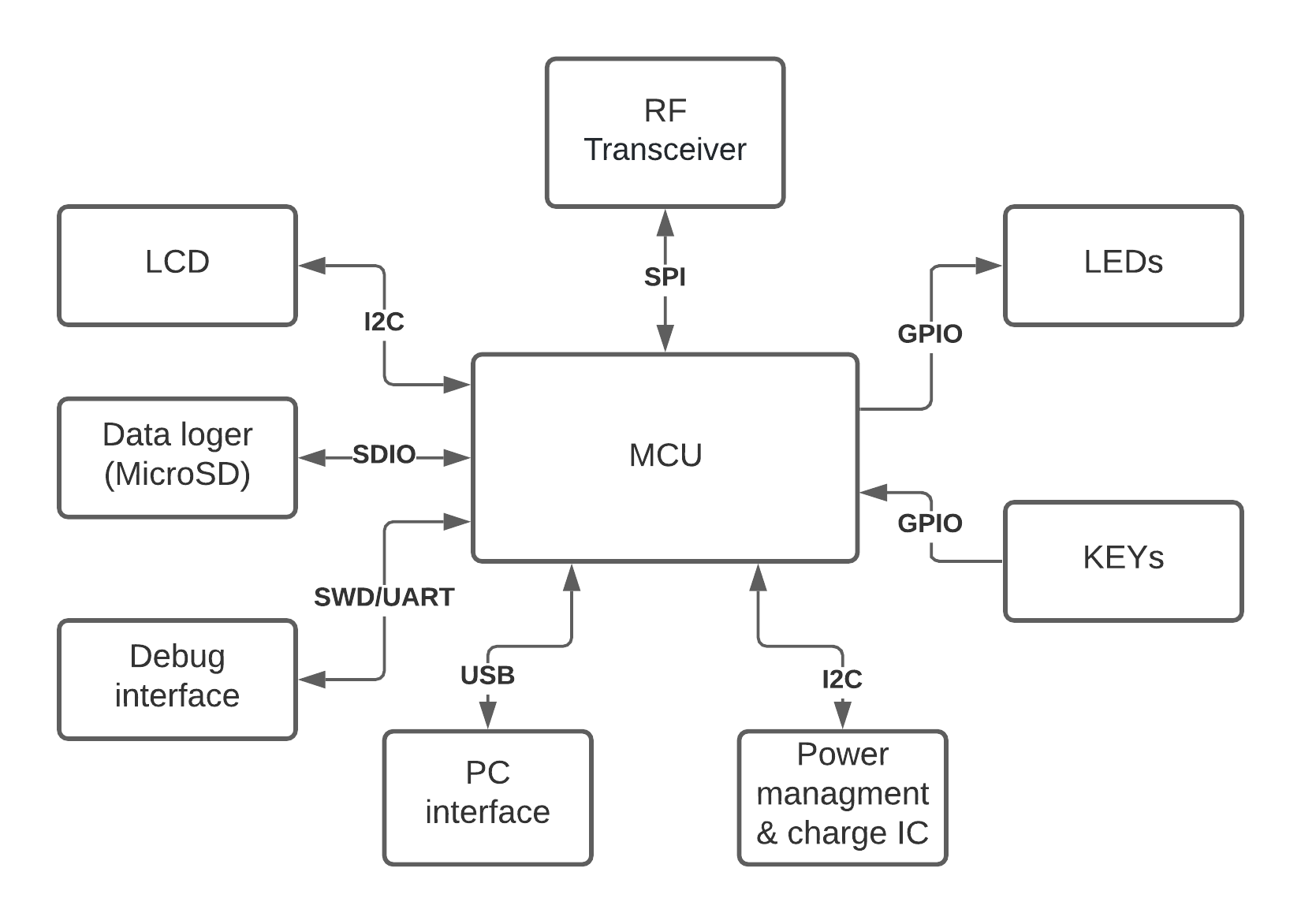
これは、1つのPCBを含むモジュールです。
ディスプレイはサービス情報を表示するためにのみ必要です。すべてのテレメトリはUSBを介してPCに送信され、GUIアプリケーションでテレメトリ、ロケットの制御コマンドの送信を表示します
詳細については、Wiki -Ground Station(RX)を参照してください
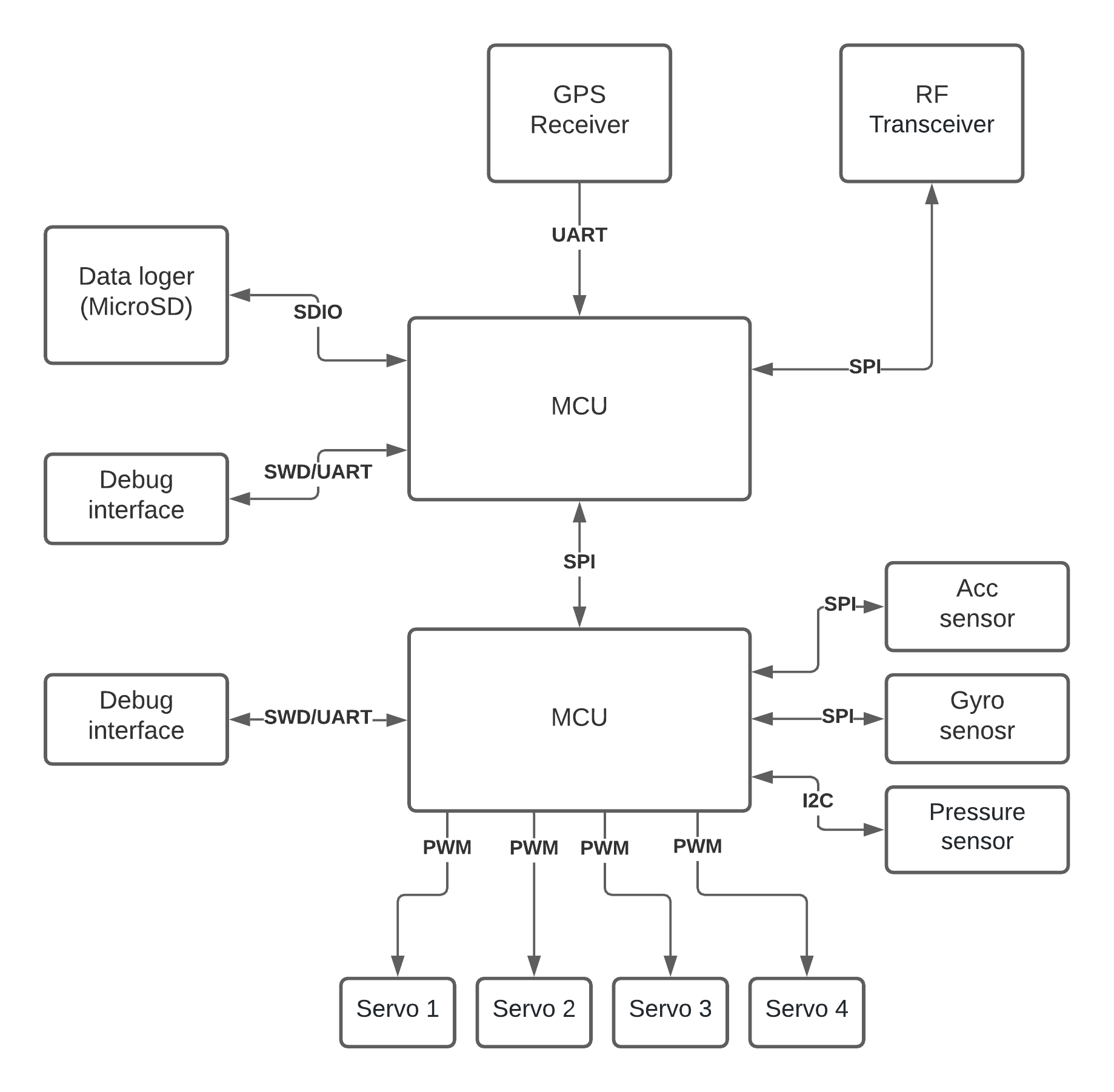
これは、スケーラビリティのための個別のPCBモジュールを含むモジュールです。
詳細については、wiki-送信モジュール(rx)を参照してください
「ホイール」を再発明しないために、UBXプロトコルは基礎として取得され、現在の要件のために簡素化されました。
シンプルさ
スケーラビリティ
空気遅延を最小限に抑えるための短いメッセージ
プロトコルにはACKとNAKが含まれていない - これは時間内のオーバーヘッドであるため、区画が地面に受け取られなかった場合、それは大丈夫です、次のメッセージを受け取りますが、パッケージの送信時間を無駄にしません:「成功した」「成功」
写真に示されているように、それは6つのブロックで構成されています
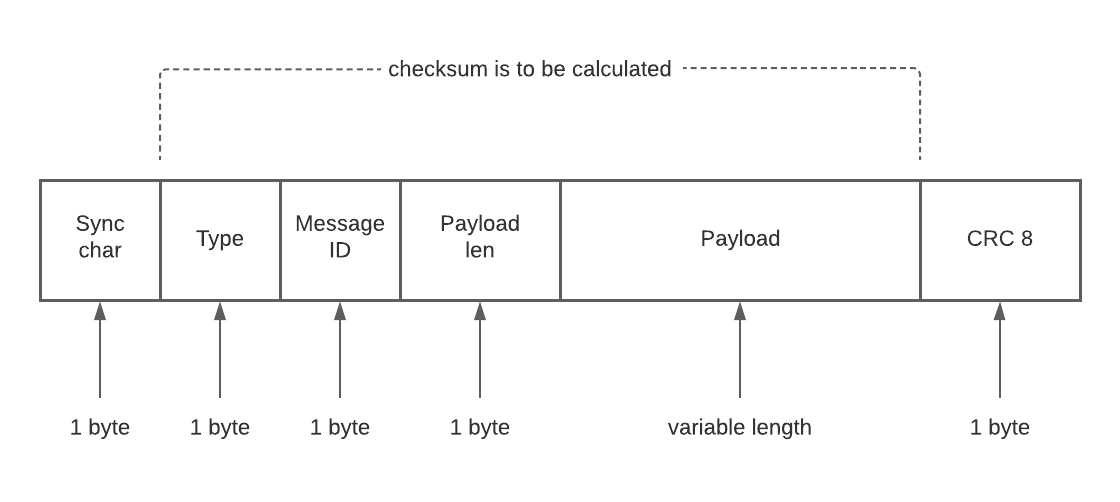
詳細については、こちらをご覧くださいWikiページ - プロトコル仕様
依存: gcc-arm-none-eabi cmake
mkdir build
cd build
cmake -DBUILD=GROUND_STATION ..
make -j
make clean
cmake -DBUILD=TX_MODULE ..
make -j
make clean
cmake -DBUILD=SERVO_MODULE ..
make -j
TODO:更新が必要です
USB経由のフラッシュの場合、 dfu-utilデバイスファームウェアアップグレードユーティリティを使用する必要があります
ubuntuのインストールsudo apt install dfu-util
macOS用にインストールしますbrew install dfu-util
またはソースファイルからビルドします
https://github.com/siemens/dfu-util
フラッシュの例: dfu-util -a 0 -s 0x08000000:leave -D your_firmware.bin
または、ビルドファームウェア後にmake flashます
リリースバージョンを開きます
オープンソースであり、すべてのユーザーに保証なしで無料で利用できるこのソフトウェア。
現在の貢献者に感謝します:
*ドキュメントは、プロジェクトが開発されると更新されます


