การเรียนรู้การเสริมแรงอย่างลึกซึ้งใน Pytorch
พื้นที่เก็บข้อมูลนี้มีอัลกอริทึม RL แบบฟรีแบบจำลองและแบบจำลองทั้งหมด (มา) ใน Pytorch (อาจมีแนวคิดการวิจัยบางอย่างที่ฉันกำลังทำอยู่ในปัจจุบัน)
สำหรับ c ++ เวอร์ชันของ pytorch-rl: pytorch-rl-cpp
มันคืออะไร?
Pytorch-RL ใช้อัลกอริธึมการเรียนรู้การเสริมแรงอย่างลึกล้ำของศิลปะใน Pytorch โดยเฉพาะอย่างยิ่งผู้ที่เกี่ยวข้องกับพื้นที่แอ็คชั่นอย่างต่อเนื่อง คุณสามารถฝึกอัลกอริทึมของคุณได้อย่างมีประสิทธิภาพทั้งใน CPU หรือ GPU นอกจากนี้ Pytorch-RL ยังทำงานร่วมกับ Openai Gym นอกกรอบ ซึ่งหมายความว่าการประเมินและเล่นกับอัลกอริทึมที่แตกต่างกันนั้นง่าย แน่นอนคุณสามารถขยาย Pytorch-RL ตามความต้องการของคุณเอง TL: DR: Pytorch-RL ทำให้ง่ายต่อการใช้อัลกอริธึมการเรียนรู้การเสริมแรงที่ล้ำสมัย
การติดตั้ง
ติดตั้ง Pytorch-RL จาก PYPI (แนะนำ):
PIP ติดตั้ง pytorch-policy
การพึ่งพาอาศัยกัน
- pytorch
- โรงยิม (Openai)
- Mujoco-py (สำหรับการจำลองฟิสิกส์และหุ่นยนต์ env ในโรงยิม)
- Pybullet (เร็ว ๆ นี้)
- MPI (รองรับการติดตั้ง MPI Backend Pytorch เท่านั้น)
- tensorboardx (https://github.com/lanpa/tensorboardx)
อัลกอริทึม RL
- DQN (พร้อมการเรียนรู้สองครั้ง)
- DDPG
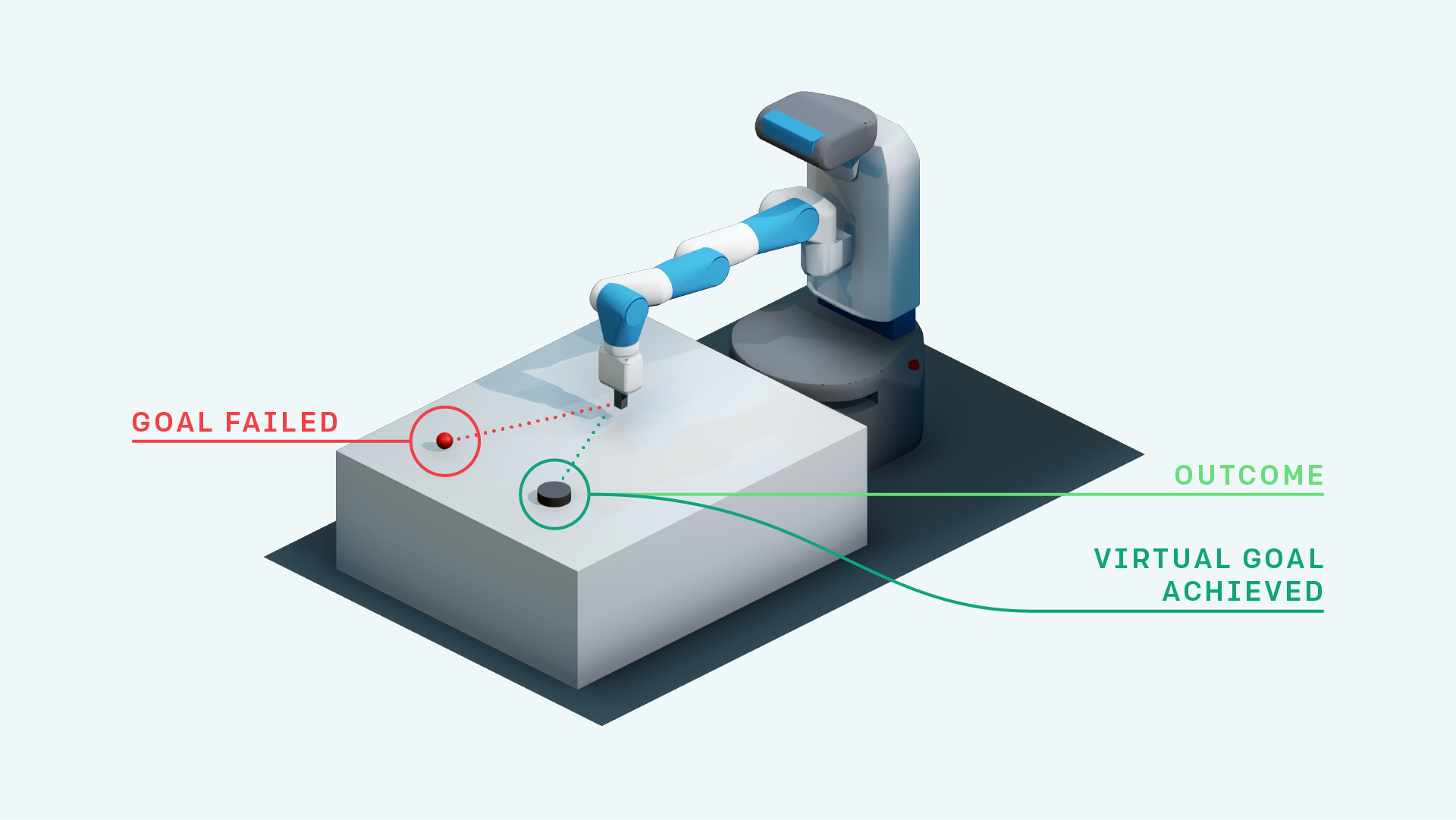
- DDPG กับเธอ (สำหรับสภาพแวดล้อมการดึงข้อมูล openai)
- การเรียนรู้การเสริมแรงจากทายาท
- ประสบการณ์การเล่นซ้ำ + DDPG
- DDPG พร้อมการเล่นซ้ำประสบการณ์ย้อนหลัง (การวิจัย)
- แผนที่ประสาทด้วย A3C (เร็ว ๆ นี้)
- Rainbow DQN (เร็ว ๆ นี้)
- PPO (https://github.com/ikostrikov/pytorch-a2c-ppo-acktr)
- เธอด้วยความสนใจในตัวเองเพื่อทดแทนเป้าหมาย (การวิจัย)
- A3C (เร็ว ๆ นี้)
- Acer (เร็ว ๆ นี้)
- ดาร์ลา
- TDM
- นางแบบโลก
- นักแสดงที่อ่อนนุ่ม
- Empowerment Driven Driven Exploration (การใช้งาน TensorFlow: https://github.com/navneet-nmk/empowerment-driven-exploration)
สภาพแวดล้อม
- การฝ่าวงล้อม
- พงษ์ (เร็ว ๆ นี้)
- งานหุ่นยนต์จัดการมือ
- งานหุ่นยนต์ที่เข้าถึงได้
- งานหุ่นยนต์ที่เข้าถึงได้ด้วยมือ
- บล็อกงานหุ่นยนต์จัดการ
- การแก้แค้นของ Montezuma (การวิจัยในปัจจุบัน)
- ความผิดพลาด
- แรงหน่วง
- การแร็ก
- Super Mario Bros (ทำตามคำแนะนำในการติดตั้ง Gym-Retro https://github.com/openai/retro)
- OpenSim Prosthetics NIPS Challenge (https://www.crowdai.org/challenges/nips-2018-ai-for-for-for-racthetics-challenge)
การสร้างแบบจำลองสภาพแวดล้อม (สำหรับการสำรวจและการปรับโดเมน)
มีการใช้เทคนิคการฝึกอบรม GAN หลายครั้งเนื่องจากความไม่แน่นอนในการฝึกอบรมเครื่องกำเนิดไฟฟ้าและผู้เลือกปฏิบัติ โปรดดูที่ https://github.com/soumith/ganhacks สำหรับข้อมูลเพิ่มเติม
แม้หลังจากใช้กลอุบายมันก็ยากที่จะฝึกฝน Gan เพื่อการบรรจบกัน อย่างไรก็ตามหลังจากใช้การทำให้เป็นมาตรฐานสเปกตรัม (https://arxiv.org/abs/1802.05957) Infogan ได้รับการฝึกฝนให้เข้าบรรจบกัน
สำหรับงานการแปลภาพกับภาพกับ GANS และสำหรับ VAES โดยทั่วไปการฝึกอบรมด้วยการเชื่อมต่อข้ามช่วยการฝึกอบรมจริงๆ
- เบต้า-วา
- คนอินฟ็กโก
- cvae-gan
- แบบจำลองการกำเนิดจากการไหล (การวิจัย)
- คนเจ้าชู้
- การเข้าร่วมตามลำดับอนุมานทำซ้ำ
- การสำรวจความอยากรู้อยากเห็น
- เสียงอวกาศพารามิเตอร์สำหรับการสำรวจ
- เครือข่ายที่มีเสียงดัง
การอ้างอิง
- เล่นอาตาริด้วยการเรียนรู้การเสริมแรงอย่างลึกซึ้ง MNIH และคณะ, 2013
- การควบคุมระดับมนุษย์ผ่านการเรียนรู้การเสริมแรงอย่างลึกล้ำ MNIH et al., 2015
- การเรียนรู้การเสริมแรงอย่างลึกล้ำด้วยการเรียนรู้แบบสองครั้ง, Van Hasselt et al., 2015
- การควบคุมอย่างต่อเนื่องด้วยการเรียนรู้การเสริมแรงอย่างลึกล้ำ Lillicrap et al., 2015
- CVAE-GAN: การสร้างภาพที่ละเอียดผ่านการฝึกอบรมแบบไม่สมมาตร, Bao et al., 2017
- Beta-vae: การเรียนรู้แนวคิดการมองเห็นขั้นพื้นฐานด้วยกรอบการแปรปรวนแบบ จำกัด , Higgins et al., 2017
- Experience Hindsight Replay, Andrychowicz et al., 2017
- Infogan: การเรียนรู้การเป็นตัวแทนที่ตีความได้โดยการเพิ่มข้อมูลสูงสุดของอวน antcersarial generative, Chen et al., 2016
- โมเดลโลก Ha et al., 2018
- การทำให้เป็นมาตรฐานทางสเปกตรัมสำหรับเครือข่ายฝ่ายตรงข้าม Generative, Miyato et al., 2018
- เครือข่ายฝ่ายตรงข้ามที่เกิดขึ้นเอง, Zhang et al., 2018
- การสำรวจที่ขับเคลื่อนด้วยความอยากรู้อยากเห็นโดยการทำนายตนเองที่ดูแลตนเอง Pathak et al., 2017
- Soft Actor-Critic: การเรียนรู้การเสริมแรงอย่างลึกซึ้งสูงสุดของเอนโทรปีกับนักแสดงสุ่ม, Haarnoja et al., 2018
- พารามิเตอร์เสียงอวกาศสำหรับการสำรวจ Plappert et al., 2018
- เครือข่ายที่มีเสียงดังสำหรับการสำรวจ Fortunato et al., 2018
- อัลกอริทึมการเพิ่มประสิทธิภาพนโยบายใกล้เคียง, Schulman et al., 2017
- การควบคุมแบบเรียลไทม์ที่ไม่ได้รับการดูแลผ่านการเสริมพลังแบบแปรปรวน Karl et al., 2017
- ข้อมูลร่วมกันการประมาณระบบประสาท Belghazi et al., 2018
- การสำรวจที่ขับเคลื่อนด้วยพลังโดยใช้การประมาณข้อมูลร่วมกัน Kumar et al., 2018