Глубокое обучение подкреплению в Pytorch
Этот репозиторий содержит все стандартные алгоритмы RL на основе моделей и модели в Pytorch. (Может также содержать некоторые исследовательские идеи, над которыми я работаю в настоящее время)
Для C ++ версии Pytorch-RL: Pytorch-RL-CPP
Что это такое?
Pytorch-RL реализует некоторые современные алгоритмы обучения глубоким подкреплением в Pytorch, особенно тех, кто связан с непрерывными действиями. Вы можете эффективно обучить свой алгоритм либо на ЦП, либо в графическом процессоре. Кроме того, Pytorch-RL работает с Gym Openai Out из коробки. Это означает, что оценка и поиска с разными алгоритмами легко. Конечно, вы можете расширить Pytorch-RL в соответствии с вашими собственными потребностями. TL: DR: Pytorch-RL позволяет очень легко запустить современные алгоритмы обучения глубоким подкреплением.
Установка
Установите Pytorch-RL из PYPI (рекомендуется):
PIP установить Pytorch-Policy
Зависимости
- Пирог
- Тренажерный зал (OpenAI)
- Mujoco-Py (для симуляции физики и Env Robotics в тренажерном зале)
- Pybullet (скоро)
- MPI (поддерживается только с помощью MPI Backend Pytorch Install)
- Tensorboardx (https://github.com/lanpa/tensorboardx)
Алгоритмы RL
- DQN (с двойным Q Learning)
- DDPG
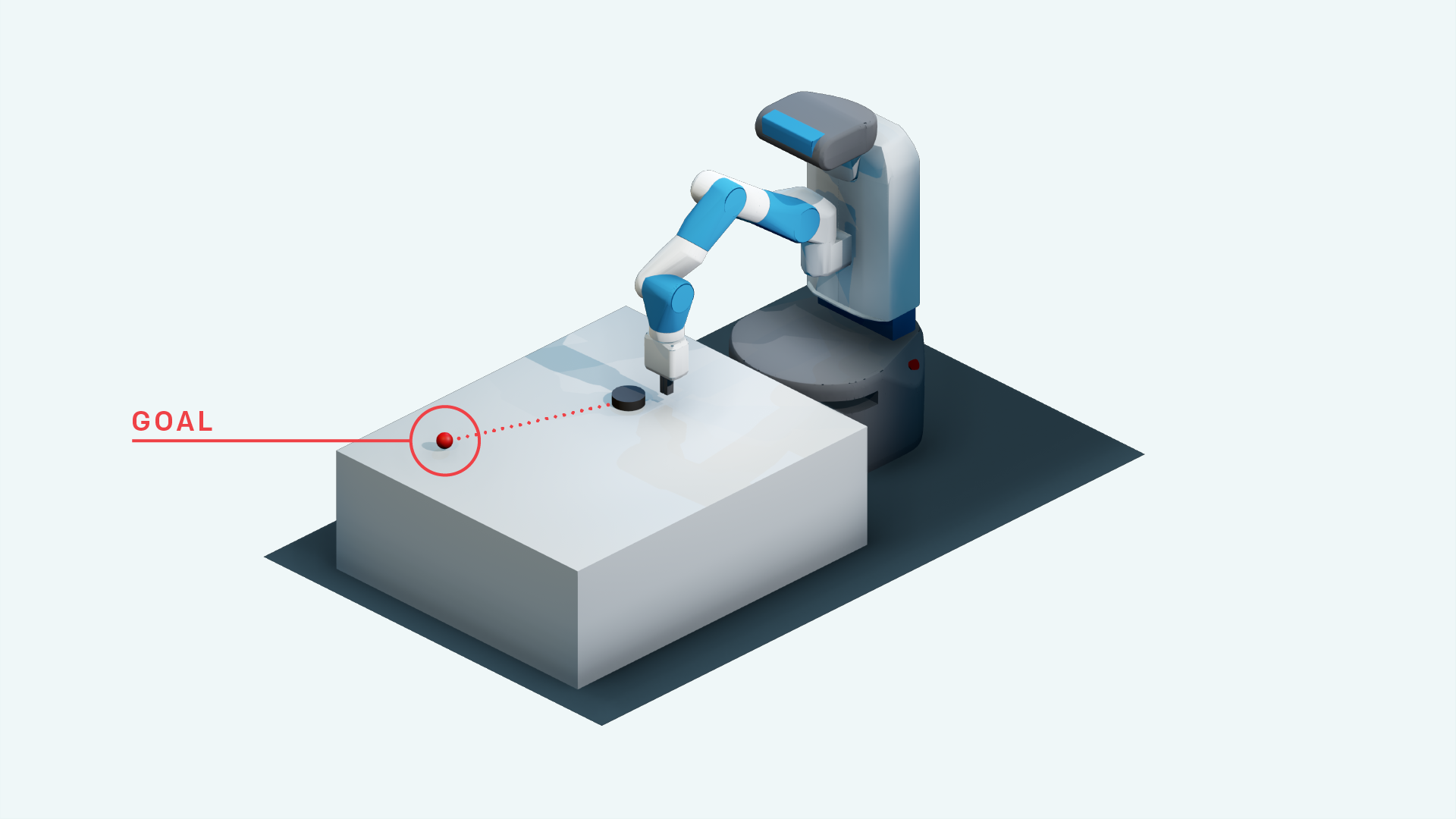
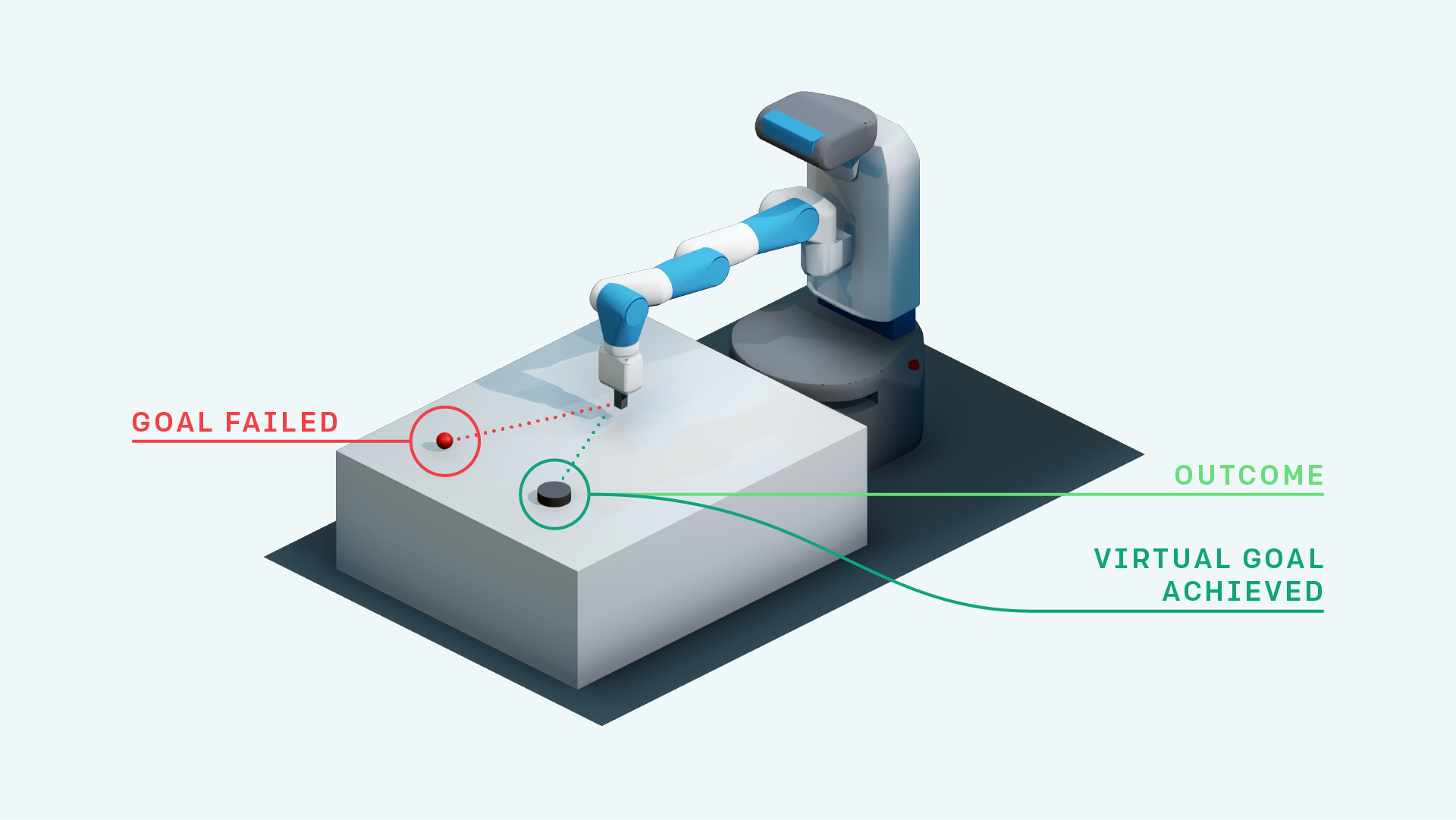
- DDPG с ней (для среды Openai Fetch)
- HEIRARCHICAL ARTERMARCIONS LEASION
- Приоритетный опыт воспроизведение + ddpg
- DDPG с приоритетным задним опытом воспроизведения (исследования)
- Нейронная карта с A3C (скоро)
- Rainbow DQN (скоро)
- PPO (https://github.com/ikostrikov/pytorch-a2c-ppo-acktr)
- Она с самообещающим вниманием к замене цели (исследование)
- A3C (скоро)
- Застенчивый (скоро)
- Дарла
- TDM
- Мировые модели
- Мягкий актер-критик
- Расследование по расширению прав и возможностей (реализация TensorFlow: https://github.com/navneet-nmk/empowerment-diven-exploration)
Среда
- Разразиться
- Понг (скоро)
- Роботизированная задача ручной манипуляции
- Задача робота из-за извлечения
- Роботизированная задача ручной работы
- Блок манипулирования роботизированной задачей
- Месть Монтесумы (текущее исследование)
- Ловушка
- Гравитар
- Перевозка
- Super Mario Bros (следуйте инструкциям по установке Gym-Retro https://github.com/openai/retro)
- OpenSim Prosthetics Nips Challenge (https://www.crowdai.org/challenges/nips-2018-ai-for-prosthetics-challenge)
Моделирование окружающей среды (для разведки и адаптации доменов)
Многочисленные тренировочные трюки GAN использовались из -за нестабильности в обучении генераторов и дискриминаторов. Пожалуйста, обратитесь к https://github.com/soumith/ganhacks для получения дополнительной информации.
Даже после использования трюков было действительно трудно тренировать Gan к конвергенции. Однако после использования спектральной нормализации (https://arxiv.org/abs/1802.05957) инфоган был обучен сходимости.
Для задач перевода изображения с изображением с Gans и для VAE в целом тренировка с Skip Connection действительно помогает обучению.
- бета-вар
- Infogan
- Cvae-gan
- Генеративные модели на основе потока (исследования)
- Саган
- Последовательное посещение, вывод, повторить
- Исследование, вызванное любопытством
- Параметр пространственного шума для исследования
- Шумная сеть
Ссылки
- Играя в Атари с глубоким подкреплением, Mnih et al., 2013
- Контроль на уровне человека через обучение глубокому подкреплению, Mnih et al., 2015
- Глубокое обучение подкреплению с двойным Q-обучением, Van Hasselt et al., 2015
- Непрерывный контроль с глубоким обучением подкрепления, Lillicrap et al., 2015
- CVAE-GAN: мелкозернистая генерация изображений через асимметричную тренировку, Bao et al., 2017
- Beta-Vae: изучение основных визуальных концепций с ограниченной вариационной структурой, Higgins et al., 2017
- Опыт повторяется, Andrychowicz et al., 2017
- Infogan: Интерпретируемое обучение представлений с помощью информации максимизирует генеративные состязательные сети, Chen et al., 2016
- World Models, Ha et al., 2018
- Спектральная нормализация для генеративных состязательных сетей, Miyato et al., 2018
- Самоализация генеративных состязательных сетей, Zhang et al., 2018
- Исследование, основанное на любопытства с помощью самоотверженного прогноза, Pathak et al., 2017
- Мягкий актер-критик: максимальная энтропия в вне политики.
- Параметр Пространственный шум для разведки, Plappert et al., 2018
- Noisy Network for Exploration, Fortunato et al., 2018
- Алгоритмы оптимизации проксимальной политики, Schulman et al., 2017
- Неконтролируемый контроль в режиме реального времени через вариационные возможности, Karl et al., 2017
- Нейронная оценка взаимной информации, Belghazi et al., 2018
- Расследование, управляемое возможностями, с использованием оценки взаимной информации, Kumar et al., 2018