KOSmk4
1.0.0
一個整體/模塊化X86操作系統 +用戶空間,重點是重新啟動和擴展其他主流OS(主要是Linux),而仍然是API/ABI兼容的。
KOSMK4(KOS操作系統系列的第四次演出)是自製的,整體的,但仍適用於i386和x86_64的模塊化核(包括其32位兼容模式)機器,並且用C ++寫成C ++(儘管僅使用功能超載和異常;所有Abis explosip; laste abis explos; laste abi comppatipabipapitible均為Compatibaible)。
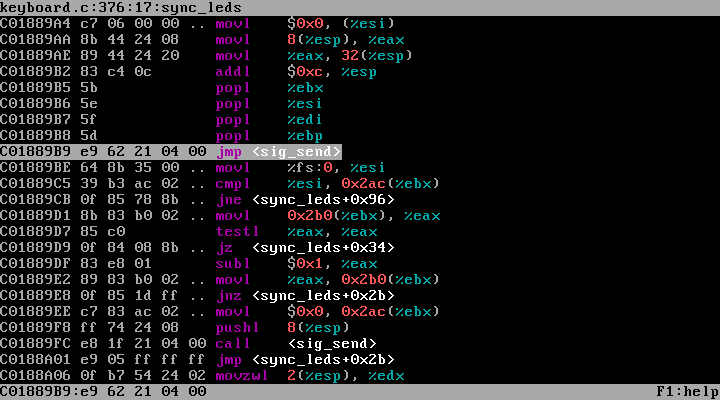
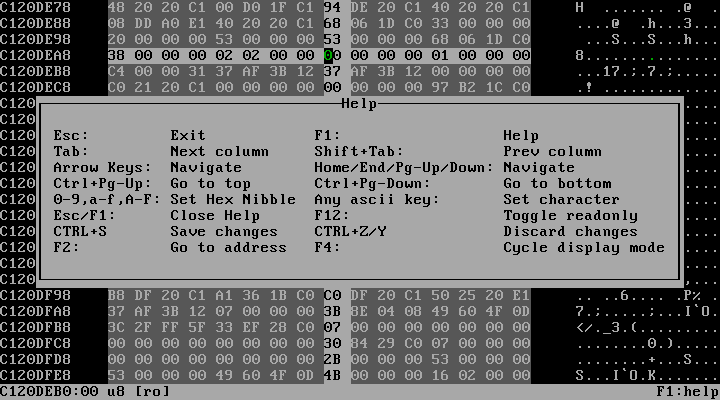
它的設計具有許多技巧,可以在調試期間進行輔助,例如一個完全互動的內置調試器,它使您能夠在出現問題時交互式分析系統狀態,並支持使用GDB進行各種不同形式的調試形式。
通常,KOS並非旨在重新發明車輪(這裡沒有方形車輪),而是要盡可能地使所述的隱喻車輪外觀和滾動。這意味著:
注意:KOS使用git subsodules(構建KOS所需的需要),因此,如果您使用下載ZIP功能,則最終將無法獲得構建KOS的所有內容。因此,為了完整克隆KOS,您必須通過使用以下方式克隆此git。
git clone --recursive https://github.com/GrieferAtWork/KOSmk4deemon magic.dee
所有移植應用程序都可以通過使用bash $PROJPATH/kos/misc/make_utility.sh i386 <UTILITY_NAME> (另請參見:獲取shell),將所有移植應用程序安裝到您的KOS磁盤映像上
catch (...)捕獲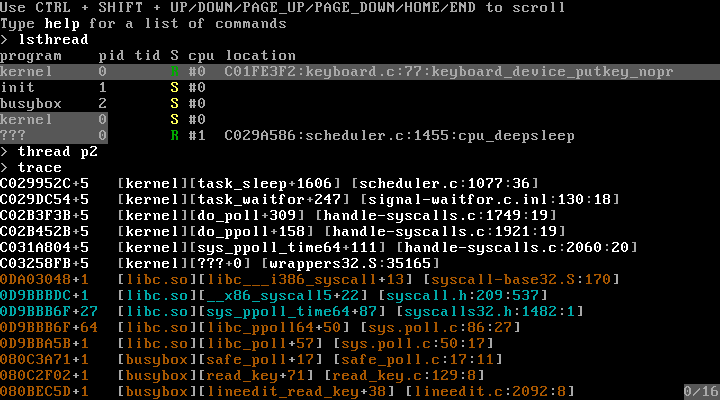
./binutils/deemon/deemon magic.dee --emulator=qemu --gdb=emulator使用此功能./binutils/deemon/deemon magic.dee --emulator=bochs --gdb=emulator使用此功能./binutils/deemon/deemon magic.dee --emulator=vbox --gdb=emulator使用此功能/kos/src/kernel/modgdbserver )boot=/dev/hda1/ )下安裝init=/bin/initrdfsbase , rdgsbase , wrfsbase , wrgsbase%fs / %gs基礎地址的方式cmpxchg , cmpxchg8b , xaddcmovcc , cpuid , nop (多字節)sfence , lfence , mfencemovbe , sarx , shlx , shrx , rorxpopcnt , tzcnt , lzcnt , pext , pdep , bzhi和andnxbegin , xend , xabort , xtest (下面的SA RTM)modrtm ),可用於基於軟件的限制性傳輸存儲器的仿真。modrtm驅動程序將在一個小沙箱中暫時模擬用戶空間代碼,然後從用戶空間程序中收集所有對內存進行的修改,然後一次將它們全部應用它們(對於其他可能嘗試修改同一內存區域的RTM操作))/kos/include/kos/rtm.h中的公共界面#UD ,KOS會分析錯誤說明libvm86的VM86支持允許使用基於64位的環境進行類似RealonMode的BIOS調用(它使用基於軟件的指令仿真,通過我的自製X86模擬器libemu86派遣)bash $PROJPATH/kos/misc/make_toolchain.sh x86_64-kos )fxsave / fxrstorinvlpg (TLB射擊)hlt的空轉(意味著什麼都沒發生的CPU週期)struct sigfutex()基於基於的同步原始圖void pit_interrupt() { ++time; yield(); } ),而是基於硬件TSC(TimestAmpCounter)rdtsc ,單獨的APIC計時器或PIT實現tsc_deadline()該函數可用於指定TSC值,然後應觸發中斷,然後將其用於調度rdtsc ,只需寫入IA32_TSC_DEADLINE MSRif (NOW >= CURRENT_DEADLINE) DO_INTR(); else tsc_deadline(CURRENT_DEADLINE); ,從而持續更新APIC/PIT重新加載值,直到實際截止日期過期(NOW - TIME_WHEN_THREAD_STARTED_WAITING) / NUM_RUNNING_THREADS ,這意味著將大部分時間的線程花費在等待的大部分時間(IE Interactive threads)會自動獲得大型性能提升tsc_deadline()設置為NOW + (NOW - TIME_WHEN_THREAD_STARTED_WAITING) / NUM_RUNNING_THREADSram=[{ "type": "ram", "start": 0x1234, "size": 0x4567 }]命令行選項libjson )iopl()和ioperm() (允許以每線程為基礎控制所有65536端口)ioperm()並不是在Linux中實現的,每當線程被搶占時,它就會進行memcpy() 。取而代之的是,KOS使用Lazy Page Directory映射在不同線程之間切換時重新映射TSS.IOBM內存區域,並且一旦IO-Instructions之一導致#PF ,將恢復映射。ioperm()的開銷既是最小的,又不會增加數量的ioport(再次:在Linux上是這種情況)。invpcid (使用cpuid選擇)invlpg (使用cpuid選擇)PGE全局頁面(使用cpuid選擇)P32 (正常)和PAE分頁(使用cpuid選擇)PAE.2MiB和P32.4MiB大頁(使用cpuid選擇,自動使用IF MOMERM映射允許使用)PAE.XD (可執行disable)(使用cpuid選擇)P64 (4級)分頁P64.2MiB和P64.1GiB大頁(以後使用cpuid選擇)P64.NX (no-odecute)(使用cpuid選擇)mmap()支持懶惰的劃分和寫入文件映射libemu86 )movl $SOME_ADDRESS, OFFSETOF_REGISTER_MAP_EIP作為jmp SOME_ADDRESS的別名mmap("/dev/urandom") ,結果是記憶映射,每個讀取(無論是什麼何處),每次製作時都會返回一個隨機值。heap_alloc() :原始堆分配器(釋放內存時需要指定尺寸)kmalloc()mman_map_kram() ( mmap() )的內核等效分配整個頁面slab_kmalloc() :平板分配器支持kmalloc()realloc() - able(so krealloc()必須將其效仿為malloc()+memcpy()+free()的平板)kmalloc() :與用戶空間malloc()幾乎相同,但採用一組描述其行為的標誌kmalloc()拋出E_BADALLOCkmalloc_nx()在出現問題時返回NULL ( nx代表NoExcept )O_DOSPATH和AT_DOSPATH以指定某些給定路徑應使用DOS語義解釋fsmode(2) ,可以強制啟用/禁用DOSPATH -mode整個過程S_ISBLK() )和字符( S_ISCHR() ) - devices)/dev )/tmp )/proc/[pid]/... )/proc/self/proc/[pid]/exe/proc/[pid]/fd/[fdno]int 80hlcall $7, $0 (根據SYSV的要求)lcall $7, $<sysno>而不必使用%eaxsysentersyscallint 80h相同的ABI/kos/include/kos/ukern.h:userkern_syscall() )/kos/src/kernel/modsctrace和/kos/src/libsctracecall __i386_syscall ,X86_64上的syscall.free Sectory部分,其中包含僅在初始化過程中使用的所有內容(例如內核的初始引導程序輸入點或設備初始化代碼)if以及在任何內核源文件中的likely / unlikely使用都可以跟踪其哪些分支的次數likely / unlikely註釋dd到某些可引導的存儲設備上,並啟動(或在模擬器的情況下:安裝座,將二進制扁平化為原始的,可啟動的磁盤圖像)/kos/src/kernel/core/arch/i386/boot/_boot0.S /core/arch/i386/boot/_boot0.s/dev/mem , /dev/kmem , /dev/port/dev/null , /dev/zero , /dev/full/dev/random , /dev/urandom/dev/kmsg/dev/tty )off_t , pos_t )time_tsignal() , raise()pipe()fork() , exec()open() , openat()[p]read() , [p]write() , lseek()[f]realpath[at]()/kos/include很多很多!SIGTTIN和SIGTTOU )dup2(1, 0x7fff1234)e[0m )$PROJPATH/kos/misc/make_utility.sh i386 ncurses )中託管libcurses並運行nanopipe()和終端佳能緩衝區的線/環/數據包緩衝區以及套接字readelf -rW /lib/i386-linux-gnu/libc.so.6 ?libc.so進行相同的操作。所以,我要計算14個重新搬遷(但我的功能仍然具有相同的功能,幾乎具有100%的API兼容性,並且至少95%的ABI兼容性)。甚至沒有提及KOS LIBC中發現的所有擴展,而是GLIBC缺少的。strend() ))memcpy()和朋友的快速實施<stdio.h> , <stdlib.h> , <malloc.h> , <string.h> , <uchar.h> ,...<format-printer.h> , <unicode.h> , <kos/futex.h> ,...'逃脫) "功能.debug_info , .debug_line中找到的解析信息, .debug_... to ...__thread內存R_386_JMP_SLOT )dlopen() , dlsym() , dlclose()RTLD_NEXTdlgethandle() )dlmodulename() )dlmodulefd() )fdlopen() )dllocksection() )dlmalloc()功能周圍的薄包裝庫ram=[{ ... }, ...]選項)struct對象KEY_*中的一種來自<kos/keyboard.h> )和鍵修改器為對應於按鍵鍵的Unicode字符<libkeymap/keymap.h>中/kos/src/misc/keymaps/*中的類似於類似conf的文件的KMP文件。<regex.h>標題sys_open(filename: "/lib64/libc.so", oflags: O_RDONLY|O_CLOEXEC)struct termios中的所有不同變換標誌提供支持.eh_frame的堆棧的放鬆/kos/misc/libgen/cfi/compiler.dee:compileExpression()vio.c和hw_illegal_instruction.c還不夠)E_SEGFAULT ,允許以與訪問未上限地址的訪問相同的方式處理例外。make_utility安裝)來顯示PCI供應商/設備名稱。/kos/include/*必須檢查__CRT_HAVE_{name}是否定義了kos-Headers暴露的任何LIBC功能<libmylibrary/...>中,並且必須始終包含一個<libmylibrary/api.h> ,該文件定義了常見的調用慣例,以及庫的dlopen(3)名稱,以及配置選項LIBMYLIBRARY_WANT_PROTOTYPES typedef int ( LIBMYLIBRARY_CC * PNAME_OF_EXPORTED_FUNCTION )( int x , int y );
#ifdef LIBMYLIBRARY_WANT_PROTOTYPES
LIBMYLIBRARY_DECL int LIBMYLIBRARY_CC name_of_exported_function ( int x , int y );
#endif /* LIBMYLIBRARY_WANT_PROTOTYPES *//kos/misc/magicgenerator/generate_headers.dee自動生成/kos/include/*盡可能多地生成/*/kos/include/hybrid/*不得與/kos/include/__std(cxx|inc).h | firctect(cxx|)em.h and /kos/include/compiler/*都不具有任何交叉依賴性。/kos/.clang-format文件並不完美:/kos/include/hybrid/*獲得的更多便攜式功能。否則,請務必事先檢查內置的__has_builtin()是否存在(不必擔心GCC不提供__has_builtin() ; KOS標頭能夠為GCC效仿該宏)__builtin_va_list , __builtin_va(start|end|copy|arg)(...)__builtin_prefetch(addr)__builtin_choose_expr(cond, tt, ff)__NO_builtin_choose_expr時,可以將此模擬為cond ? tt : ff )__builtin_offsetof(struct, field)__builtin_expect(expr, expected)__builtin_unreachable()__builtin_assume(expr)expr始終是正確的(主要是替代assert()的替代者,因為您真正想獲得快速的代碼,並且不關心不穩定性,並謹慎使用;請記住,請確保它可能是一個不可能的expr 。__NO_builtin_assume op__builtin_constant_p(expr) (可以模擬以始終評估為false )__NO_builtin_constant_p__restrictrestrict ,但許多編譯器尚未支持它,以至於編譯器本地理解__restrict的程度比理解restrict編譯器更加理解__的限制。__restrict__builtin_types_compatible_p(T1, T2) (固定返回0 )__NO_builtin_types_compatible_p如果不支持<__stdinc.h> ,或包括一個無條件包含的標頭(此標頭用於完成創建可用功能的常見,跨編譯器基礎的所有工作)#ifdef __CC__ block ( CC standing C/C++-Compiler)/kos/include/[__]OFFSET_MYSTRUCT_MYFIELD and [__]SIZEOF_MYSTRUCT macros describing the absolute offsets of certain fields$PROJPATH/kos/src/_verify/[arch/(i386|...)/]assert_types.ctcc from inside of KOS after also having installed KOS system headers.MYOBJ_IOC_COMMAND ioctls from files in /kos/include/kos/ioctl/ 要求:
$PATH , this will automatically be downloaded + configured + build by: bash $PROJPATH/kos/misc/make_toolchain.sh i386-kos Don't worry: the install location will still be contained within the KOS source tree. More specifically, the deemon executable will end up as $PROJPATH/binutils/deemon/deemon[.exe]$PROJPATH/binutils/i386-kos/bin/i686-kos-*[.exe]bash $PROJPATH/kos/misc/make_toolchain.sh i386-kos$PATH . otherwise, add the location to the enumerateQEmuInstallationLocations() function in $PROJPATH/kos/misc/magicemulator/qemu.dee )make (obviously...)wget (to download 3rd party packages, including binutils and gcc)mpfr , gmp , mpclib (needed for building gcc)patch (for patching 3rd party packages to better understand KOS)gdb (if you wish to debug KOS)mpfr / gmp / mpclib (as needed for building gcc), I had to do: apt-get install libmpc-devBuilding KOS (from $PROJPATH):
./binutils/deemon/deemon magic.dee --build-only --target=i386 --config=ODRunning KOS (from $PROJPATH):
./binutils/deemon/deemon magic.dee --run-only --target=i386 --config=ODBuilding+Running KOS (from $PROJPATH):
./binutils/deemon/deemon magic.dee --target=i386 --config=OD Be careful if you're using an outdated version of deemon . I (GrieferAtWork) am the BDFL for it, as well as KOS, and it already happened more than once that I fixed/added something in/to deemon because I needed it for use with the KOS toolchain. So if something's not working, try to re-build deemon for the $DEEMON_VERSION declared in kos/misc/make_toolchain.sh , and if that also isn't working, try using the most recent version of deemon. One or the other should be working, and if not, create an issue for it and I'll see if I can help.
Just like its predecessors, KOS mk4 uses busybox to provide you with the full user-space bash-like shell experience (Personally, I'm really only interested in the whole kernel-space side of hobby OS programming, alongside the design and implementation of user-space libraries). When it comes to front-ends (and yes: I'm calling a commandline a front-end; deal with it puts-on-sunglasses ), I loose all interest.
However, I made it as simple as ever for you to get going with an installation of busybox onto your KOS disk image:
# Make sure that you've already set up the KOS toolchain
bash $PROJPATH /kos/misc/make_toolchain.sh i386-kos
# Make sure that you've built the entirety of KOS at least once (here: in no-optimize-debug mode)
deemon $PROJPATH /magic.dee --target=i386 --config=nOD --build-only
# Do the actual work of downloading, configuring & building busybox
bash $PROJPATH /kos/misc/make_utility.sh i386 busybox就是這樣。 That last command will download, build & install busybox into every i386 KOS disk image that it can find under $PROJPATH/bin/... , also meaning that if you choose to clear out $PROJPATH/bin (or have just build KOS for a specific configuration for the first time), you will have to ensure that magic.dee was run at least once for your intended configuration, followed by re-executing the make_utility.sh command.
The plan is to add more software to make_utility.sh in the future, so that you'll be able to install select third-party software with this easy-to-use method of building them.
If you have any suggestions for software (or even better: code snippets for use in make_utility.sh alongside any required patch files), feel free to send them to me and I might add them so that everyone can use them.
Like already mentioned in Ported Applications, building 3rd party programs/libraries for use with KOS is done by invoking the $PROJPATH/kos/misc/make_utility.sh script.
I'd also like to recommend that you dont run make_utility.sh as root. While I'm doing my best to get utilities to behave and not try to copy files into host system paths, given that these aren't my projects, I can't guaranty that some of them might still try to do this in certain situations. As such, by running make_utility.sh as a normal user, 3rd party configure+make scripts won't be able to modify/write files in host system paths.
However, building 3rd party programs sometimes requires additional utilities to be installed. In most cases, these utilities can be read from error messages, however here's a list of some that you'll be needing for quite a few of them:
autoconf + automake + libtool (for projects that don't come with a ready-made ./configure script, but instead the raw configure.ac )cmake (for cmake-based projects)gperf (currently only needed by fontconfig )perl (currently only needed by openssl ) I neither have the time nor will to make sure that any kind of build environment works.
So with that in mind, I can only recommend you'd use the same one I'm using:
If that's not to your liking, you can also try to mirror the environment used in .github/workflows/build-i386-kos-nOD.yml , which essentially just uses linux.
The magic.dee file found in $PROJROOT is the primary controller for doing anything with KOS (you can just think of it as my version of make )
If the file extension (and the use of deemon for starting) wasn't enough, it's a deemon script.
To help you understand how this script works to do what it does, here is a documentation about its options:
-1-v , --verbose-E , -S-E preprocessor output files-S assembler input files--run-only--build-only-fRebuild kernel in Visual Studio--format-error-messagesfile:line[:column]:... into what is accepted by Visual Studio's file(line[,column]) : ... format (allowing you to click such lines within build output)--install-sh$DESTDIR (see also Installing KOS)--deemon magic.dee -- init=/bin/system-test will run system-test after boot instead of /bin/init-n=N (Defaults to -n=<number-of-cores-on-your-machine> )N--emulator=NAME (Defaults to --emulator=qemu )NAME must be one of qemu , bochs or vbox--changed=FILENAMEFILENAME has changedFILE is interpreted relative to the PWD set when magic.dee got invoked--gdb=MODE (Defaults to not-given)MODE must be one ofserver : Use the builtin GDB server driveremulator : Use the emulators's builtin GDB stub (not supported by all emulators)tcp:localhost:1234 on your machine--emulator-started-pattern=TEXTTEXT to stdout when the emulator is started (needed for syncing with Visual Studio)--target=TARGET (Defaults to automatic detection; see below)TARGET (which must be one of i386 , x86_64 , ...)--config=CONFIG (Defaults to automatic detection; see below)OD and nOD , so there is a high chance that the other two configurations won't even build...--gen=FILEFILE instead of executing everythinglibc.so and libm.so as part of make_toolchain.shFILE is interpreted relative to the PWD set when magic.dee got invoked--gengroup=NAMENAME , as well as steps for dependencies of a group NAMEdeemon magic.dee --gengroup=libs.libc )--gengroup-of=FILE--gengroup=... , but instead of specifying the name of some group, only a source file is givenFILE , then forming a set of all of the groups of those files, before finally running all steps and dependencies of those groupsFILE is interpreted relative to the PWD set when magic.dee got invokedFILE should be passed as the file that is currently opened, allowing you to quickly build (only) the part of the system that you currently have opened.$PROJPATH/kos/misc/build/vsautoconfig.dee--regen=PATTERN--gen=... , but select files using a regular expression patternPATTERN doesn't get formatted according to the PWD set when magic.dee got invoked--driver=NAME[:NAME] , --driver=NAME,CMDLINENAME into the kernel during boot, where NAME is either the driver's filename within $PROJPATH/bin/$TARGET-kos-$CONFIG/os/drivers/ , or a filename within the host filesystem if it contains any slashesCMDLINE may be given, which is then passed to the driver during initializationdeemon magic.dee --driver=usb-storage:usb , deemon magic.dee --driver=usb:usb-storageusb is a dependency of usb-storage , and the initialization order is always:usbusb-storagedeemon magic.dee --driver=usb-storageusb driver is missing $PROJPATH/bin/$TARGET-kos expands to $TARGET-kos-$CONFIG .$PROJPATH/bin/$TARGET-kos/lib is set up as part of the library path used by things such as -lc flags.--target=$TARGET and --config=$CONFIG$PROJPATH/bin/$TARGET-kos/...$PROJPATH/bin/$TARGET-kos-$CONFIG/...$PROJPATH/kos/include/$TARGET_XARCH-kos/...$PROJPATH/kos/src/[...]/$TARGET_XARCH/...TARGET_XARCH = $TARGET == "x86_64" ? "i386" : $TARGET --target=... and --config=... options$PROJPATH/kos/.vs/ProjectSettings.json (which is automatically created and updated by Visual Studio to always reflect the currently selected build configuration) Many KOS system features can be configured before you start building KOS for real. For this purpose, you can create custom configurations (or use the one of the 4 default configurations). Configurations are created by you writing a new header file /kos/include/kos/config/configurations/myconfig.h . For more information on the contents of this file, see the associated README.md.
Files in this folder are interpreted as configurations, which can then be used with magic.dee to build KOS using your custom configuration.
deemon magic.dee --target=i386 --config=myconfig Additionally, custom configurations also appear in VS/VSC project files (though only once you re-generate them). For this, you can simply re-run make_toolchain.sh for any configuration, or directly execute the relevant script ( deemon kos/misc/config/files.dee ).
Build files, binary output, as well as disk images all exist on a per-configuration basis, meaning that after creating a new configuration, you will have to re-install 3rd party library into the new disk images, as well as allow KOS to be re-build from scratch (this is automatically done by magic.dee ).
As such, when executed, your custom config will produce files under the following paths:
/build/i386-kos-myconfig (temporary build files)/bin/i386-kos-myconfig (generated binaries, including your disk image)The following configurations are provided by default:
| 姓名 | Pretty name | Extra GCC commandline options |
|---|---|---|
nOD | DEBUG | -fstack-protector-strong |
nOnD | NDEBUG | -DNDEBUG |
OD | Optimize, DEBUG | -O2 -fstack-protector-strong |
OnD | Optimize, NDEBUG | -O3 -DNDEBUG |
To install (and eventually run) KOS on real hardware, the easiest way is to get a USB thumbdrive, format it as FAT32 (caution: make sure it doesn't get formatted as VFAT), and install GRUB or some other multiboot- or multiboot2-compliant bootloader onto it.
With that done, you can use the KOS build system to build everything you're going to need, as well as have it generate+execute some shell-scripts which can then be used to copy everything onto your USB thumbdrive:
export TARGET= " i386 "
export CONFIG= " nOD "
export DESTDIR= " /path/to/kos/install "
make install-system
make install-busybox If you don't want to use make , but execute the commands yourself, here is how installing works:
deemon magic.dee --install-sh --target=i386 --config=nOD > install.sh
bash kos/misc/make_utility.sh --install-sh i386 busybox >> install.sh This process can later be repeated for any 3rd party utility you wish to install. At this point, install.sh should look like this:
[...]
mkdir -p "$DESTDIR/os/drivers"
KOS_ROOT="${KOS_ROOT:-/cygdrive/e/c/kls/kos}"
cp "$KOS_ROOT/bin/i386-kos-nOD/os/drivers/tar" "$DESTDIR/os/drivers/tar"
mkdir -p "$DESTDIR/lib"
cp "$KOS_ROOT/bin/i386-kos-nOD/lib/libbios86.so" "$DESTDIR/lib/libbios86.so"
cp "$KOS_ROOT/bin/i386-kos-nOD/os/drivers/pe" "$DESTDIR/os/drivers/pe"
mkdir -p "$DESTDIR/bin"
cp "$KOS_ROOT/bin/i386-kos-nOD/bin/init" "$DESTDIR/bin/init"
cp "$KOS_ROOT/bin/i386-kos-nOD/os/drivers/procfs" "$DESTDIR/os/drivers/procfs"
[...]
ln -s "busybox" "$DESTDIR/bin/script"
ln -s "busybox" "$DESTDIR/bin/scriptreplay"
ln -s "busybox" "$DESTDIR/bin/setpriv"
ln -s "busybox" "$DESTDIR/bin/setsid"
ln -s "../bin/busybox" "$DESTDIR/sbin/swapon"
ln -s "../bin/busybox" "$DESTDIR/sbin/swapoff"
ln -s "../bin/busybox" "$DESTDIR/sbin/switch_root"
ln -s "busybox" "$DESTDIR/bin/taskset"
ln -s "busybox" "$DESTDIR/bin/umount"
ln -s "busybox" "$DESTDIR/bin/unshare"
ln -s "busybox" "$DESTDIR/bin/wall"
mkdir -p "$DESTDIR/etc"
ln -s "/proc/mounts" "$DESTDIR/etc/mtab"
Finally, you can execute this script like so (but make sure to replace /path/to/kos/install with where you mounted the USB thumbdrive on your host computer):
cat " install.sh " | DESTDIR= " /path/to/kos/install " bash Once this has been done, you should be able to boot KOS from within grub by loading it from /os/kernel.bin , whilst supplying it the necessary USB drivers as multiboot modules, so that it's able to detect the thumbdrive and mount it during booting.
Note that it's also possible to directly stream these build scripts into bash like so:
deemon magic.dee --install-sh --target=i386 --config=nOD | DESTDIR= " /path/to/kos/install " bash
bash kos/misc/make_utility.sh --recursive --install-sh i386 busybox | DESTDIR= " /path/to/kos/install " bash
bash kos/misc/make_utility.sh --recursive --install-sh i386 vitetris | DESTDIR= " /path/to/kos/install " bash
bash kos/misc/make_utility.sh --recursive --install-sh i386 nano | DESTDIR= " /path/to/kos/install " bash
...That way, you only need a single commandline to install each component.
You will need to install the C/C++ extension (just search for C++ under extensions)
Afterwards, make sure that make_toolchain.sh has already been executed at least once, as it will generate required configuration files for VS code.
Finally, use the Open Folder function to open the /kos sub-folder.
Make sure that make_toolchain.sh has already been executed at least once, as it will generate required configuration files for Visual Studio. Once this has been done, you can use the Open Folder function under the file-tab ( CTRL+SHIFT+ALT+O ) to open the /kos sub-folder. - DONT OPEN THE ACTUAL ROOT FOLDER (see notes below).
Alternatively (because Open Folder tends to be extremely laggy), you can also run make vs-proj , and open the /.vs/kos.sln file it generated. While this method fixes all of the slow-downs that appear when using Open Folder , take note of the following caveats:
make vs-proj , any changes you made will be overwrittenmake vs-proj (After doing this, VS will detect this and ask you to re-load its project files. When prompted to, confirm this reload)F5 ), you will not actually be debugging KOS, but will be debugging deemon as it is executing /magic.dee (though while it does so, deemon will still launch qemu and KOS as expected). To properly debug KOS, you have to do the following:CTRL+ALT+A to open the "Command Window"alias d Debug.MIDebugLaunch /Executable:foo /OptionsFile:MIOptions.xmld , followed by ENTERCTRL+SHIFT+B ) before running d from the "Command Window". If you fail to do so and run d immediately, you will actually launch whatever configuration you had selected previously. I personally use Visual Studio 2017 Community Edition for this, as it actually has a fairly unknown feature Open Folder which allows for a hacky way to get full support for GDB debugging without having to pay an insane sum of up to $340 for VisualGDB (I'm doing this as a hobby; I don't have that kind of money; Jeez: I could barely scrape together $10 if that was the asking price)
I mean seriously: Even when you scoure the osdev wiki you'll come across references to VisualGDB and VisualKernel, so I really don't understand who wrote that recommendation. - I don't think any of us bare-metal, kernel-development enthusiats (especially newcomers who could use a real, and simple to use integrated debugging experience the most) would be willing to pay that much...
Anyways. - Even though practically no documentation on this feature of Visual Studio (of which you can get the Community Edition for free by the way) exists, I managed to get it working through trial and error.
And if you don't like Visual Studio (or aren't using Windows) I do know for a fact that Visual Studio Code also includes functionality for connecting to a GDB server/stub when you start diving into extensions
So here are your options:
tcp:localhost:1234 , and have qemu wait until something connects to it):deemon magic.dee --run-only --gdb=server --target=i386 --config=OD This one uses my own personal gdb server that gets loaded into the kernel as a driver. It offers out-of-the-box support for enumerating libraries, drivers, and running threads/processes (offering both multiprocess+ and QNonStop:1 functionality)deemon magic.dee --run-only --gdb=emulator --target=i386 --config=OD This one uses qemu's built-in gdb stub, which offers less functionality since it won't know how to enumerate threads created by the KOS scheduler, or list all of the libraries/drivers loaded into the kernel, meaning that tracebacks will only include source locations from the kernel core. This option is mainly meant for debugging things that happen before the GDB driver is loaded, or things that break the GDB stub driver itself (It's home-made and hacked together based on knowledge leared from observation, qemu's implementation, gdbserver, and bits and pieces of documentation from across the internet)$PROJPATH/kos folder and have all of this happen in 1 step when you press the debug buttongdb built for a generic i386 target and type target remote localhost:1234筆記:
$PROJPATH , but open $PROJPATH/kos instead. - Opening the former will not work properly and Visual Studio may even crash after a while since (at least for me) it seems unable to coax with the thousands of source files apart of binutils and gcc. And despite all of the methods that (supposedly) exist to have Visual Studio ignore certain paths within your source tree, all of them only function to hide folders from the Solution Explorer (despite their documentation claiming to also hide them from the source code scanners). So my solution was to move everything that's actually interesting to me into the $PROJPATH/kos sub-folder and always open that one when programming.make_toolchain.sh at least once to ensure that it was able to generate the file $PROJPATH/kos/.vs/launch.vs.json (this has to be done dynamically since it must contain some absolute paths depending on where your $PROJPATH is located at) (for this purpose, it's likely to work even if make_toolchain.sh fails, since the creation of this file is one of the first things it does) The KOS build system is quite complex, as KOS system headers depend on CRT feature definition files which it will automatically generate/update as features are added to, or removed from the kernel or libc.
Some parts of the system headers and libraries are automatically generated. This normally happens as part of invoking deemon magic.dee , which will check if changes happened to the sources of such files. (You can easily tell that a file is auto-generated by checking if it starts with /* HASH CRC-32:... */ )
Note however that you should not attempt to manually modify automatically generated pieces of code. - Doing so will cause the build system to refuse to overwrite your changes so-as to never accidentally delete them without you realizing what happened.
The most notable feature of the KOS build system is the way that it generates libc headers, as well as sources, inline-substitutions, and a few other files.
For this, the KOS system header folder contains crt feature files. These files are literally huge headers with thousands of #define s for every publicly exported symbol (they can be found in /kos/include/i386-kos/crt-features/crt-kos[-kernel].h ).
Using this system, KOS system headers will automatically determine the features provided by the linked libc, and fill in the gaps, thus offering a much more complete API experience, regardless of what the underlying libraries actually offer.
Now assuming that some functionality is missing from linked libraries, this manifests itself by the automatic function substitution system kicking in and providing local definitions (aka. static/inline functions) for pretty much everything found in system headers (eg memcpy is immediately implemented as an inline/static function in /kos/include/libc/local/string/memcpy.h ).
With these substitutions in place, libraries and the kernel can still be built, however will result in below-optimal code being generated, simple due to the rediculous amount of redundancies.
For more information about the header substitution system, and how it makes it possible to use KOS's headers for toolchains other than KOS itself (requiring only minor, to no modifications at all), take a look at the section on Automatic System Headers.
KOS supports emulated execution via one of the following emulators:
deemon magic.deedeemon magic.dee --emulator=qemuenumerateQEmuInstallationLocations() in $PROJPATH/kos/misc/magicemulator/qemu.dee (by default this list contains $PATH )deemon magic.dee --emulator=bochsenumerateBochsInstallationLocations() in $PROJPATH/kos/misc/magicemulator/bochs.dee (by default this list contains $PATH )deemon magic.dee --emulator=vboxenumerateVirtualBoxInstallLocations() in $PROJPATH/kos/misc/magicemulator/vbox.dee (by default this list contains $PATH ) KOS uses various interpreter/intermediate compilers for centralizing the definition, substitution, aliasing, binding, and documentation of most system headers containing definitions of functions exported from libc. (A similar system also exists for defining and updating system calls)
This system is tightly interwoven with the CRT feature files described in the section Notes on building KOS, and will automatically provide and substitute definitions for not only C-standard headers, but also a variety of others.
This is done via a custom function definition protocol implemented by a deemon program found in $PROJPATH/kos/misc/magicgenerator/generate_headers.dee , which when run, will parse and link the definition files from $PROJPATH/kos/src/libc/magic/*.c to gain knowledge of what goes where, how everything looks like, what annotations may be applied to functions, how functions are implemented, and so on...
As the end result, KOS is able to provide definitions for many header functions while simultaniously exporting them from both libc (and sometimes the kernel) in such a way that the possibility of mistakes happening due to redundancy falls away (eg all function prototypes of memcpy() are annotated with ATTR_NONNULL((1, 2)) , and despite this specific annotation existing in possibly more than 20 places, any changes to it would only require a single modification of the tags in /kos/src/libc/magic/string.c ).
Additionally, when using KOS headers with a CRT other than KOS, this makes it possible to substitute KOS-specific extensions such as strend() by automatically providing a local implementation of the function though /kos/include/local/string/strend.h , where this variant of the function is implemented identically to the variant exported by KOS's libc, meaning that in the event of changes having to be made to its implementation, all that's required is another single alteration in /kos/src/libc/magic/string.c .
In the end, thanks to the feature definition files (which basically just needs to contain a list of all the symbols exported from the CRT against which the hosted binary is to-be linked), 90% of the usual work of having KOS headers be hosted by some new libc will only require the addition of a new crt-features file, as well as making use of it in /kos/include/__crt.h , making the KOS toolchain extremely configurable, as well as versatile and portable. (That is: once you understand how everything fits together)
Another useful feature of this lies in the fact that it allows any source file to force the use of local definitions of certain functions, preventing that source file from becoming dependent on being linked against libc (being able to do this is required to build a dynamic linker, which couldn't very well do its job of linking if it had to link itself first...).
For example, an application could force the headers to provide a local implementation of sprintf() :
/* Load CRT features so we can modify them to our liking */
#include <__crt.h>
/* Delete sprintf() support from libc (`sprintf()' will now be
* defined with a local implementation that invokes `vsprintf()') */
#undef __CRT_HAVE_sprintf
/* Delete vsprintf() support from libc (`vsprintf()' will now be
* defined with a local implementation that invokes `format_vprintf()') */
#undef __CRT_HAVE_vsprintf
/* Delete format_vprintf() support from libc (`format_vprintf()' will
* now be implemented entirely within this compilation unit, and no
* longer be loaded from libc) */
#undef __CRT_HAVE_format_vprintf
/* The same procedure could now be repeated for all of the functions
* which may be called by `format_vprintf()', until eventually there
* won't be any trace left of the dependencies normally related to
* `sprintf()' */
#include <stdio.h>
/* This application does not have a dependency on libc:`sprintf' */
int main () {
char buf [ 64 ];
sprintf ( buf , "foo = %d" , 42 );
printf ( "%sn" , buf );
return 0 ;
} Note however, that some functions can't easily be substituted (eg open(2) ). As such, if a function appears in a header, but isn't provided by libc, nor has a local implementation, the function will simply not be defined (giving you a compile-time error, rather than having to wait for link-time).
Lastly, if there ever ends up being some gaping flaw in how KOS defines functions in headers, the fix will always be as simple as making a limited number of changes to the code generator scripts, instead of requiring millions of code locations to be updated, only to forget a hand full of them and have them lingering as dormant bugs to re-surface years in the future.
WARNING: NOTHING IN THE FOLLOWING SECTION IS LEGAL ADVICE, OR MAY BE CONSIDERED AS LEGALLY BINDING IN ANY SORT OF COURT! IT'S ONLY PURPOSE IS TO HELP CLARIFY HOW TO DEAL WITH CODE THAT IS LICENSED DIFFERENTLY!
Certain components of KOS, its (system-)headers, libraries, or some other component found as part of its source tree, as one is presented with in whatever form of distribution you may encouter it (KOS's source tree) in, may contain few parts that are not necessarily licensed under the ZLib license (the ZLib license being the primary license under which all of the new (as in: specifically written for the purpose of use with KOS) code falls)
One example for this would be the implementation of the libc function qsort() , as exported from the header <stdlib.h> , who's implementation has been lifted from Glibc (which is not licensed under ZLib, and as such requires derived code's direct (as in: static inclusion during linking, or automatic inline substitution during compilation, as opposed to dynamic linking at runtime) use in any derived software to also comply with its (Glibc's) license agreement)
For this purpose, note that the ZLib license is compatible with GPL (which is the license that applies to the aformentioned , meaning that use of KOS in its entirety in any product requires that product to comply with the requirements of both GPL, as well as ZLib.qsort() function)
For the purpose of using only parts of KOS (such as copy-pasting a piece of KOS-specific ( new ) code), it is usually sufficient to include a copy of the copyright notice that should be located at the top of the original source file, or can also be found in $PROJPATH/LICENSE , as well as include a reference (eg a link) to the original source (and git revision/commit id), and document the fact if changes have been made. However, once any code is included that is not part of the aformentioned KOS-specific ( new ) code (such code is plainly marked as such), you once again will have to comply to its specific copyright requirements as well.
Note that for this purpose, GPL was only mentioned as an example, but not as the rule, as other pieces of code may exist that use different licenses yet.
In practice this means that the KOS source tree, and its repository are required to remain open-source forever, thus complying with GPL, however other projects are allowed to lift KOS-specific code (and KOS-specific code only), and only have to comply with requirements stated by the ZLib license. (eg You could steal my pageframe allocator system and use it in a commercial kernel, so-long as you neither claim to have written it yourself, and as an extension: don't claim to have written everything in your project yourself, as well as take the blame when it does end up breaking for some reason at some point)
Another important distinction applies to GPL code that has been modified for the purpose of being made functional with KOS. Such code will always be marked as such and must be handled as falling under both the GPL, and the ZLib license (the original base code being GPL, and the changed made (ie an imaginary *.patch file) being ZLib), meaning that it (the end-product of the imaginary *.patch file), too, has to remain open-source, may not end up being used in commercial products, and any further changes made to it in the context of other projects will also have to be marked as such (in this case it sufficies to include all pre-exting copyright notices, before adding your own (GPL- and ZLib-compatible) license alongside a comment stating something something along the lines of Originally lifted from https://github.com/GrieferAtWork/KOSmk4/..., before changes were made to the original source material ) The exact changes are not required to be marked on a per-line basis, since the inclusion of a reference to the original source (alongside a git revision/commit id) would allow one to perform a diff between the two versions to determine changes made.


