KOSmk4
1.0.0
Монолитная/модульная операционная система x86 + пользовательская пространство с акцентом на повторное оборудование и расширение других основных OSES (в первую очередь Linux), в то же время совместно с API/ABI.
KOSMK4 (4-е исполнение серии операционной системы KOS) представляет собой домашнее, монолитное, но все еще модульное ядро для i386 и x86_64 (включая его 32-битный режим совместимости) и написано в C ++ ( хотя только для использования функций и исключений;
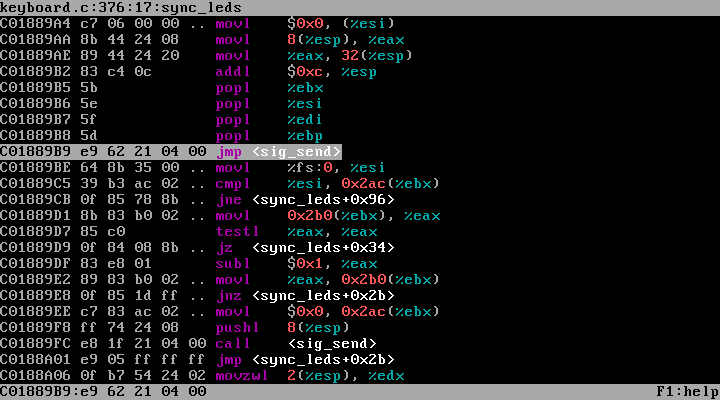
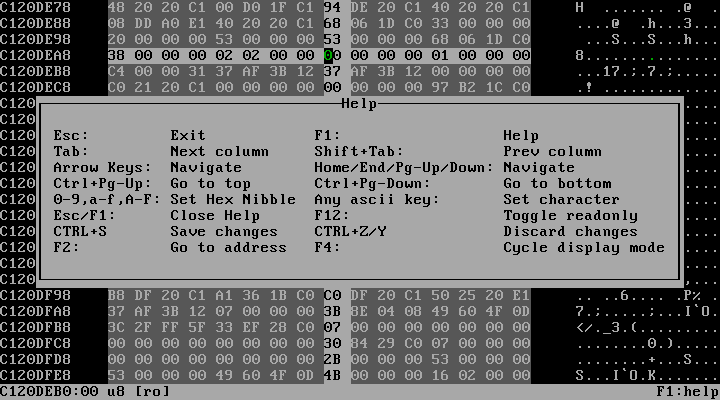
Он разработан с большим количеством трюков в рукаве, чтобы помочь во время отладки, такими как полностью интерактивный встроенный отладчик, который дает вам возможность интерактивно анализировать состояние системы, когда что -то идет не так, а также поддержка различных форм отладки с использованием GDB.
В целом, KOS не предназначен для повторного изобретения колеса (здесь нет квадратных колес), а скорее пытается сделать метафорический вид колеса и катиться, а также как можно больше. Это означает, что:
Примечание : KOS использует GIT -подмодулы (которые необходимы для создания KOS), поэтому, если вы используете функцию загрузки ZIP , вы не получите все, что входит в создание KO. Таким образом, чтобы полностью клонировать КОС, вы должны клонировать этот git с помощью:
git clone --recursive https://github.com/GrieferAtWork/KOSmk4deemon magic.dee
Все портативные приложения могут быть установлены на ваше изображение диска KOS, используя bash $PROJPATH/kos/misc/make_utility.sh i386 <UTILITY_NAME> (см. Также: Получение оболочки)
catch (...)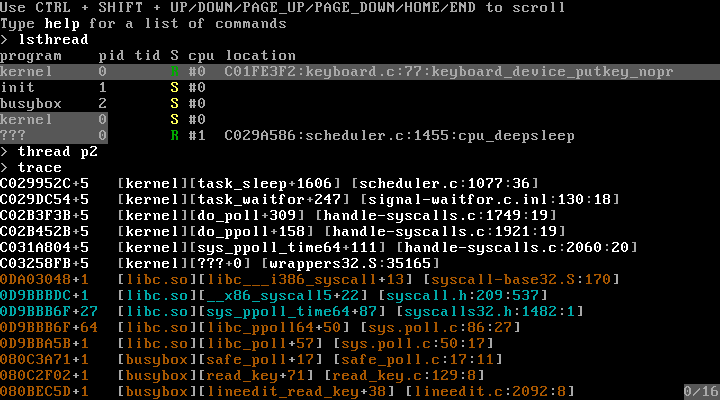
./binutils/deemon/deemon magic.dee --emulator=qemu --gdb=emulator./binutils/deemon/deemon magic.dee --emulator=bochs --gdb=emulator./binutils/deemon/deemon magic.dee --emulator=vbox --gdb=emulator/kos/src/kernel/modgdbserverboot=/dev/hda1/ )init=/bin/initrdfsbase , rdgsbase , wrfsbase , wrgsbase%fs / %gscmpxchg , cmpxchg8b , xaddcmovcc , cpuid , nop (Multi-Byte)sfence , lfence , mfencemovbe , sarx , shlx , shrx , rorxpopcnt , tzcnt , lzcnt , pext , pdep , bzhi , andnxbegin , xend , xabort , xtest (SA RTM ниже)modrtm ), который можно использовать для эмуляции программного обеспечения ограниченной трансационной памяти .modrtm временно имитирует код пространства пользователя в небольшой песочнице, из которой он будет собирать все изменения, сделанные в память программой пользовательского пространства, прежде чем атомически применять их все сразу (в отношении других операций RTM, которые могут попытаться изменить одни и те же области памяти)/kos/include/kos/rtm.h#UD , Kos анализирует инструкции по ошибкеlibvm86 позволяет выполнять настоящие модельные вызовы BIOS, которые все еще выполняются из контролируемой 64-разрядной среды (он использует эмуляцию программного обеспечения, отправленную через мой домашний эмулятор x86 libemu86 )bash $PROJPATH/kos/misc/make_toolchain.sh x86_64-kos )fxsave / fxrstorinvlpg (TLB-Shootdowns)hlt -на основе холостого хода (это означает, что нет циклов процессора, когда ничего не происходит)struct sigfutex()void pit_interrupt() { ++time; yield(); } ), а вместо этого на основе аппаратного TSC (timestampcounter)rdtsc , только таймер APIC или в ямуtsc_deadline() , которую можно использовать для указания значения TSC, после чего следует запустить прерывание, которое затем можно использовать для планированияrdtsc просто напишите в IA32_TSC_DEADLINE MSRif (NOW >= CURRENT_DEADLINE) DO_INTR(); else tsc_deadline(CURRENT_DEADLINE); , таким образом, постоянно обновляя значения APIC/PIT RELOAD до тех пор, пока не истекло фактический крайний срок(NOW - TIME_WHEN_THREAD_STARTED_WAITING) / NUM_RUNNING_THREADS , что означает, что потоки, которые тратят большую часть своего времени на ожидание (т.е. интерактивные потоки) автоматически получают большой подъем производительностиtsc_deadline() установлено в NOW + (NOW - TIME_WHEN_THREAD_STARTED_WAITING) / NUM_RUNNING_THREADSram=[{ "type": "ram", "start": 0x1234, "size": 0x4567 }] Опция командной линииlibjson )iopl() и ioperm() (позволяя контролировать все порты 65536 на основе)ioperm() не реализован, как в Linux, который выполняет memcpy() всякий раз, когда поток преодолевается. Вместо этого KOS использует Lazy Page Directory Mappings, чтобы повторно отобразить область памяти TSS.IOBM при переключении между различными потоками, и восстановить отображение, как только одна из IO-Instructions вызывает #PF .ioperm() одновременно минимальны и не увеличиваются, если используются более чистые ioports (что, опять же, будет иметь место на Linux).invpcid (выбран с использованием cpuid )invlpg (выбран с использованием cpuid )PGE Global Pages (выбранные с использованием cpuid )P32 (нормальный) и PAE Paging на i386 (выбран с использованием cpuid )PAE.2MiB и P32.4MiB большие страницы (выбранные с использованием cpuid , автоматически используются, если сопоставления памяти позволят это)PAE.XD (execute-disable) (выбран с использованием cpuid )P64 (4-уровневое) подкрепление на x86_64P64.2MiB и P64.1GiB большие страницы (а затем выбираются с использованием cpuid )P64.NX (no-excute) (выбран с использованием cpuid )mmap() при поддержке лениво инициализированных и записных отображений файловlibemu86 )movl $SOME_ADDRESS, OFFSETOF_REGISTER_MAP_EIP в качестве псевдонима для jmp SOME_ADDRESSmmap("/dev/urandom") , и результатом является отображение памяти, где каждое чтение, независимо от того, где не сделано, возвращает случайное значение каждый раз, когда оно будет сделано.heap_alloc() : необработанные распределители кучи (необходимо указать размер при освобождении памяти)kmalloc()mman_map_kram() (эквивалент ядра mmap() ) для распределения целых страницslab_kmalloc() : поддержка распределения плитыkmalloc()realloc() -Able (so krealloc() должен эмулировать его как malloc()+memcpy()+free() для плитов)kmalloc() : почти так же, как пользовательское пространство malloc() , но берет набор флагов, описывающих его поведениеkmalloc() бросает исключение ( E_BADALLOC ), когда распределение не удалосьkmalloc_nx() возвращает NULL , когда что -то пошло не так ( nx стоит за NoExcept )O_DOSPATH и AT_DOSPATH чтобы указать, что какой -то данное путь следует интерпретировать с использованием семантики DOSfsmode(2) , который может принудительно принудительно/отключить DOSPATH -моду для всего процессаS_ISBLK() ) и символ ( S_ISCHR() ) -devices)/dev )/tmp )/proc/[pid]/... )/proc/self/proc/[pid]/exe/proc/[pid]/fd/[fdno]int 80hlcall $7, $0 (как того требует Sysv)lcall $7, $<sysno> вместо необходимости использовать %eaxsysentersyscallint 80h/kos/include/kos/ukern.h:userkern_syscall() )/kos/src/kernel/modsctrace и /kos/src/libsctracecall __i386_syscall на i386 и syscall на x86_64.free памяти» в ядре, которое содержит все, что используется только во время инициализации (например, начальная точка входа загрузчика или код инициализации устройства)if и каждое использование likely / unlikely в любом исходном файле ядра отслеживает, какая из его ветвей получилось в какое количество разlikely / unlikely аннотации, которые просто неверныdd на некотором загрузочном устройстве для хранения и загрузите его (или в случае эмулятора: установите сглаженные бинарны в виде необработанного, загружаемого диска изображения)/kos/src/kernel/core/arch/i386/boot/_boot0.S/dev/mem , /dev/kmem , /dev/port/dev/null , /dev/zero , /dev/full/dev/random , /dev/urandom/dev/kmsg/dev/tty )off_t , pos_t )time_tsignal() , raise()pipe()fork() , exec()open() , openat()[p]read() , [p]write() , lseek()[f]realpath[at]()/kos/include ))SIGTTIN и SIGTTOU )dup2(1, 0x7fff1234)e[0m )libcurses в XERM-Mode (SA $PROJPATH/kos/misc/make_utility.sh i386 ncurses ) и запустить nanopipe() и терминальных канонных буферов, а также розеткиreadelf -rW /lib/i386-linux-gnu/libc.so.6 ?libc.so , я считаю 14 переездов (но у меня все же есть все одинаковые функциональности, с почти 100% -ную совместимость API и по меньшей мере 95% ABI-совместимости). И это даже не упоминает все расширения, найденные в LIBC KOS, но отсутствуют в Glibc.strend()memcpy() и друзей<stdio.h> , <stdlib.h> , <malloc.h> , <string.h> , <uchar.h> , ...<format-printer.h> , <unicode.h> , <kos/futex.h> , ...' и " сбегания).debug_info , .debug_line , .debug_... ...__thread )R_386_JMP_SLOT )dlopen() , dlsym() , dlclose()RTLD_NEXTdlgethandle() )dlmodulename() )dlmodulefd() )fdlopen() )dllocksection() )dlmalloc() Doug Learam=[{ ... }, ...] опция)structKEY_* из <kos/keyboard.h> ) и модификаторов ключей в символы Unicode, соответствующие нажатым клавишам<libkeymap/keymap.h>/kos/src/misc/keymaps/*<regex.h> в libc.sosys_open(filename: "/lib64/libc.so", oflags: O_RDONLY|O_CLOEXEC)struct termios.eh_frame , как в пространстве пользователя, так и в пространстве ядра/kos/misc/libgen/cfi/compiler.dee:compileExpression()vio.c и hw_illegal_instruction.c уже недостаточно)E_SEGFAULT , позволяя обработать исключение так же, как и доступ к неизменному адресу.make_utility ) для отображения имен поставщика/устройств PCI./kos/include/* должна проверить, определено ли __CRT_HAVE_{name}<libmylibrary/...> и должна всегда содержать файл <libmylibrary/api.h> , который определяет соглашение об общем вызове, а также имя dlopen(3) для библиотеки, а также опция конфигурации LIBMYLIBRARY_WANT_PROTOTYPES typedef int ( LIBMYLIBRARY_CC * PNAME_OF_EXPORTED_FUNCTION )( int x , int y );
#ifdef LIBMYLIBRARY_WANT_PROTOTYPES
LIBMYLIBRARY_DECL int LIBMYLIBRARY_CC name_of_exported_function ( int x , int y );
#endif /* LIBMYLIBRARY_WANT_PROTOTYPES *//kos/include/* должно быть сгенерировано автоматически с помощью /kos/misc/magicgenerator/generate_headers.dee/kos/include/hybrid/* не должно иметь никаких перекрестных зависимости от файлов, отличных от /kos/include/__std(cxx|inc).h и /kos/include/compiler/*/kos/.clang-format не идеален:/kos/include/hybrid/* . В противном случае, всегда проверяйте, существует ли встроенный с помощью __has_builtin() заранее (не беспокойтесь о том, что GCC не предоставляет __has_builtin() ; заголовки KOS способны подражать этому макрому для GCC)__builtin_va_list , __builtin_va(start|end|copy|arg)(...)__builtin_prefetch(addr)__builtin_choose_expr(cond, tt, ff)cond ? tt : ff , когда определяется __NO_builtin_choose_expr )__builtin_offsetof(struct, field)__builtin_expect(expr, expected)__builtin_unreachable()__builtin_assume(expr)expr всегда верен (в основном полезно в качестве замены assert() , когда expr действительно хотите получить быстрый код, и не заботиться о несуществующих, используйте с осторожностью и помните, что это может быть просто не оцениваемым.__NO_builtin_assume если это просто нет__builtin_constant_p(expr) (может быть имитация, чтобы всегда оцениваться до false )__NO_builtin_constant_p если не поддерживается__restrictrestrict ключевого слова, многие компиляторы еще не поддерживают его до такой степени, что больше компиляторов изначально понимают __restrict чем те, которые понимают restrict__restrict повсюду и позвольте заголовкам беспокоиться о том, как предоставить это ключевое слово__builtin_types_compatible_p(T1, T2) (заглушенное, чтобы всегда возвращать 0 )__NO_builtin_types_compatible_p если не поддерживается<__stdinc.h> в какой-то момент или включает в себя еще один заголовок, который безоговорочно включает в себя его (этот заголовок используется для выполнения всей работы по созданию общей, межкомпьюлеровской основы доступных функций)#ifdef __CC__ block ( CC standing C/C++-Compiler)/kos/include/[__]OFFSET_MYSTRUCT_MYFIELD and [__]SIZEOF_MYSTRUCT macros describing the absolute offsets of certain fields$PROJPATH/kos/src/_verify/[arch/(i386|...)/]assert_types.ctcc from inside of KOS after also having installed KOS system headers.MYOBJ_IOC_COMMAND ioctls from files in /kos/include/kos/ioctl/ Требования:
$PATH , this will automatically be downloaded + configured + build by: bash $PROJPATH/kos/misc/make_toolchain.sh i386-kos Don't worry: the install location will still be contained within the KOS source tree. More specifically, the deemon executable will end up as $PROJPATH/binutils/deemon/deemon[.exe]$PROJPATH/binutils/i386-kos/bin/i686-kos-*[.exe]bash $PROJPATH/kos/misc/make_toolchain.sh i386-kos$PATH . otherwise, add the location to the enumerateQEmuInstallationLocations() function in $PROJPATH/kos/misc/magicemulator/qemu.dee )make (obviously...)wget (to download 3rd party packages, including binutils and gcc)mpfr , gmp , mpclib (needed for building gcc)patch (for patching 3rd party packages to better understand KOS)gdb (if you wish to debug KOS)mpfr / gmp / mpclib (as needed for building gcc), I had to do: apt-get install libmpc-devBuilding KOS (from $PROJPATH):
./binutils/deemon/deemon magic.dee --build-only --target=i386 --config=ODRunning KOS (from $PROJPATH):
./binutils/deemon/deemon magic.dee --run-only --target=i386 --config=ODBuilding+Running KOS (from $PROJPATH):
./binutils/deemon/deemon magic.dee --target=i386 --config=OD Be careful if you're using an outdated version of deemon . I (GrieferAtWork) am the BDFL for it, as well as KOS, and it already happened more than once that I fixed/added something in/to deemon because I needed it for use with the KOS toolchain. So if something's not working, try to re-build deemon for the $DEEMON_VERSION declared in kos/misc/make_toolchain.sh , and if that also isn't working, try using the most recent version of deemon. One or the other should be working, and if not, create an issue for it and I'll see if I can help.
Just like its predecessors, KOS mk4 uses busybox to provide you with the full user-space bash-like shell experience (Personally, I'm really only interested in the whole kernel-space side of hobby OS programming, alongside the design and implementation of user-space libraries). When it comes to front-ends (and yes: I'm calling a commandline a front-end; deal with it puts-on-sunglasses ), I loose all interest.
However, I made it as simple as ever for you to get going with an installation of busybox onto your KOS disk image:
# Make sure that you've already set up the KOS toolchain
bash $PROJPATH /kos/misc/make_toolchain.sh i386-kos
# Make sure that you've built the entirety of KOS at least once (here: in no-optimize-debug mode)
deemon $PROJPATH /magic.dee --target=i386 --config=nOD --build-only
# Do the actual work of downloading, configuring & building busybox
bash $PROJPATH /kos/misc/make_utility.sh i386 busybox Вот и все. That last command will download, build & install busybox into every i386 KOS disk image that it can find under $PROJPATH/bin/... , also meaning that if you choose to clear out $PROJPATH/bin (or have just build KOS for a specific configuration for the first time), you will have to ensure that magic.dee was run at least once for your intended configuration, followed by re-executing the make_utility.sh command.
The plan is to add more software to make_utility.sh in the future, so that you'll be able to install select third-party software with this easy-to-use method of building them.
If you have any suggestions for software (or even better: code snippets for use in make_utility.sh alongside any required patch files), feel free to send them to me and I might add them so that everyone can use them.
Like already mentioned in Ported Applications, building 3rd party programs/libraries for use with KOS is done by invoking the $PROJPATH/kos/misc/make_utility.sh script.
I'd also like to recommend that you dont run make_utility.sh as root. While I'm doing my best to get utilities to behave and not try to copy files into host system paths, given that these aren't my projects, I can't guaranty that some of them might still try to do this in certain situations. As such, by running make_utility.sh as a normal user, 3rd party configure+make scripts won't be able to modify/write files in host system paths.
However, building 3rd party programs sometimes requires additional utilities to be installed. In most cases, these utilities can be read from error messages, however here's a list of some that you'll be needing for quite a few of them:
autoconf + automake + libtool (for projects that don't come with a ready-made ./configure script, but instead the raw configure.ac )cmake (for cmake-based projects)gperf (currently only needed by fontconfig )perl (currently only needed by openssl ) I neither have the time nor will to make sure that any kind of build environment works.
So with that in mind, I can only recommend you'd use the same one I'm using:
If that's not to your liking, you can also try to mirror the environment used in .github/workflows/build-i386-kos-nOD.yml , which essentially just uses linux.
The magic.dee file found in $PROJROOT is the primary controller for doing anything with KOS (you can just think of it as my version of make )
If the file extension (and the use of deemon for starting) wasn't enough, it's a deemon script.
To help you understand how this script works to do what it does, here is a documentation about its options:
-1-v , --verbose-E , -S-E preprocessor output files-S assembler input files--run-only--build-only-fRebuild kernel in Visual Studio--format-error-messagesfile:line[:column]:... into what is accepted by Visual Studio's file(line[,column]) : ... format (allowing you to click such lines within build output)--install-sh$DESTDIR (see also Installing KOS)--deemon magic.dee -- init=/bin/system-test will run system-test after boot instead of /bin/init-n=N (Defaults to -n=<number-of-cores-on-your-machine> )N--emulator=NAME (Defaults to --emulator=qemu )NAME must be one of qemu , bochs or vbox--changed=FILENAMEFILENAME has changedFILE is interpreted relative to the PWD set when magic.dee got invoked--gdb=MODE (Defaults to not-given)MODE must be one ofserver : Use the builtin GDB server driveremulator : Use the emulators's builtin GDB stub (not supported by all emulators)tcp:localhost:1234 on your machine--emulator-started-pattern=TEXTTEXT to stdout when the emulator is started (needed for syncing with Visual Studio)--target=TARGET (Defaults to automatic detection; see below)TARGET (which must be one of i386 , x86_64 , ...)--config=CONFIG (Defaults to automatic detection; see below)OD and nOD , so there is a high chance that the other two configurations won't even build...--gen=FILEFILE instead of executing everythinglibc.so and libm.so as part of make_toolchain.shFILE is interpreted relative to the PWD set when magic.dee got invoked--gengroup=NAMENAME , as well as steps for dependencies of a group NAMEdeemon magic.dee --gengroup=libs.libc )--gengroup-of=FILE--gengroup=... , but instead of specifying the name of some group, only a source file is givenFILE , then forming a set of all of the groups of those files, before finally running all steps and dependencies of those groupsFILE is interpreted relative to the PWD set when magic.dee got invokedFILE should be passed as the file that is currently opened, allowing you to quickly build (only) the part of the system that you currently have opened.$PROJPATH/kos/misc/build/vsautoconfig.dee--regen=PATTERN--gen=... , but select files using a regular expression patternPATTERN doesn't get formatted according to the PWD set when magic.dee got invoked--driver=NAME[:NAME] , --driver=NAME,CMDLINENAME into the kernel during boot, where NAME is either the driver's filename within $PROJPATH/bin/$TARGET-kos-$CONFIG/os/drivers/ , or a filename within the host filesystem if it contains any slashesCMDLINE may be given, which is then passed to the driver during initializationdeemon magic.dee --driver=usb-storage:usb , deemon magic.dee --driver=usb:usb-storageusb is a dependency of usb-storage , and the initialization order is always:usbusb-storagedeemon magic.dee --driver=usb-storageusb driver is missing $PROJPATH/bin/$TARGET-kos expands to $TARGET-kos-$CONFIG .$PROJPATH/bin/$TARGET-kos/lib is set up as part of the library path used by things such as -lc flags.--target=$TARGET and --config=$CONFIG$PROJPATH/bin/$TARGET-kos/...$PROJPATH/bin/$TARGET-kos-$CONFIG/...$PROJPATH/kos/include/$TARGET_XARCH-kos/...$PROJPATH/kos/src/[...]/$TARGET_XARCH/...TARGET_XARCH = $TARGET == "x86_64" ? "i386" : $TARGET --target=... and --config=... options$PROJPATH/kos/.vs/ProjectSettings.json (which is automatically created and updated by Visual Studio to always reflect the currently selected build configuration) Many KOS system features can be configured before you start building KOS for real. For this purpose, you can create custom configurations (or use the one of the 4 default configurations). Configurations are created by you writing a new header file /kos/include/kos/config/configurations/myconfig.h . For more information on the contents of this file, see the associated README.md.
Files in this folder are interpreted as configurations, which can then be used with magic.dee to build KOS using your custom configuration.
deemon magic.dee --target=i386 --config=myconfig Additionally, custom configurations also appear in VS/VSC project files (though only once you re-generate them). For this, you can simply re-run make_toolchain.sh for any configuration, or directly execute the relevant script ( deemon kos/misc/config/files.dee ).
Build files, binary output, as well as disk images all exist on a per-configuration basis, meaning that after creating a new configuration, you will have to re-install 3rd party library into the new disk images, as well as allow KOS to be re-build from scratch (this is automatically done by magic.dee ).
As such, when executed, your custom config will produce files under the following paths:
/build/i386-kos-myconfig (temporary build files)/bin/i386-kos-myconfig (generated binaries, including your disk image)The following configurations are provided by default:
| Имя | Pretty name | Extra GCC commandline options |
|---|---|---|
nOD | DEBUG | -fstack-protector-strong |
nOnD | NDEBUG | -DNDEBUG |
OD | Optimize, DEBUG | -O2 -fstack-protector-strong |
OnD | Optimize, NDEBUG | -O3 -DNDEBUG |
To install (and eventually run) KOS on real hardware, the easiest way is to get a USB thumbdrive, format it as FAT32 (caution: make sure it doesn't get formatted as VFAT), and install GRUB or some other multiboot- or multiboot2-compliant bootloader onto it.
With that done, you can use the KOS build system to build everything you're going to need, as well as have it generate+execute some shell-scripts which can then be used to copy everything onto your USB thumbdrive:
export TARGET= " i386 "
export CONFIG= " nOD "
export DESTDIR= " /path/to/kos/install "
make install-system
make install-busybox If you don't want to use make , but execute the commands yourself, here is how installing works:
deemon magic.dee --install-sh --target=i386 --config=nOD > install.sh
bash kos/misc/make_utility.sh --install-sh i386 busybox >> install.sh This process can later be repeated for any 3rd party utility you wish to install. At this point, install.sh should look like this:
[...]
mkdir -p "$DESTDIR/os/drivers"
KOS_ROOT="${KOS_ROOT:-/cygdrive/e/c/kls/kos}"
cp "$KOS_ROOT/bin/i386-kos-nOD/os/drivers/tar" "$DESTDIR/os/drivers/tar"
mkdir -p "$DESTDIR/lib"
cp "$KOS_ROOT/bin/i386-kos-nOD/lib/libbios86.so" "$DESTDIR/lib/libbios86.so"
cp "$KOS_ROOT/bin/i386-kos-nOD/os/drivers/pe" "$DESTDIR/os/drivers/pe"
mkdir -p "$DESTDIR/bin"
cp "$KOS_ROOT/bin/i386-kos-nOD/bin/init" "$DESTDIR/bin/init"
cp "$KOS_ROOT/bin/i386-kos-nOD/os/drivers/procfs" "$DESTDIR/os/drivers/procfs"
[...]
ln -s "busybox" "$DESTDIR/bin/script"
ln -s "busybox" "$DESTDIR/bin/scriptreplay"
ln -s "busybox" "$DESTDIR/bin/setpriv"
ln -s "busybox" "$DESTDIR/bin/setsid"
ln -s "../bin/busybox" "$DESTDIR/sbin/swapon"
ln -s "../bin/busybox" "$DESTDIR/sbin/swapoff"
ln -s "../bin/busybox" "$DESTDIR/sbin/switch_root"
ln -s "busybox" "$DESTDIR/bin/taskset"
ln -s "busybox" "$DESTDIR/bin/umount"
ln -s "busybox" "$DESTDIR/bin/unshare"
ln -s "busybox" "$DESTDIR/bin/wall"
mkdir -p "$DESTDIR/etc"
ln -s "/proc/mounts" "$DESTDIR/etc/mtab"
Finally, you can execute this script like so (but make sure to replace /path/to/kos/install with where you mounted the USB thumbdrive on your host computer):
cat " install.sh " | DESTDIR= " /path/to/kos/install " bash Once this has been done, you should be able to boot KOS from within grub by loading it from /os/kernel.bin , whilst supplying it the necessary USB drivers as multiboot modules, so that it's able to detect the thumbdrive and mount it during booting.
Note that it's also possible to directly stream these build scripts into bash like so:
deemon magic.dee --install-sh --target=i386 --config=nOD | DESTDIR= " /path/to/kos/install " bash
bash kos/misc/make_utility.sh --recursive --install-sh i386 busybox | DESTDIR= " /path/to/kos/install " bash
bash kos/misc/make_utility.sh --recursive --install-sh i386 vitetris | DESTDIR= " /path/to/kos/install " bash
bash kos/misc/make_utility.sh --recursive --install-sh i386 nano | DESTDIR= " /path/to/kos/install " bash
...That way, you only need a single commandline to install each component.
You will need to install the C/C++ extension (just search for C++ under extensions)
Afterwards, make sure that make_toolchain.sh has already been executed at least once, as it will generate required configuration files for VS code.
Finally, use the Open Folder function to open the /kos sub-folder.
Make sure that make_toolchain.sh has already been executed at least once, as it will generate required configuration files for Visual Studio. Once this has been done, you can use the Open Folder function under the file-tab ( CTRL+SHIFT+ALT+O ) to open the /kos sub-folder. - DONT OPEN THE ACTUAL ROOT FOLDER (see notes below).
Alternatively (because Open Folder tends to be extremely laggy), you can also run make vs-proj , and open the /.vs/kos.sln file it generated. While this method fixes all of the slow-downs that appear when using Open Folder , take note of the following caveats:
make vs-proj , any changes you made will be overwrittenmake vs-proj (After doing this, VS will detect this and ask you to re-load its project files. When prompted to, confirm this reload)F5 ), you will not actually be debugging KOS, but will be debugging deemon as it is executing /magic.dee (though while it does so, deemon will still launch qemu and KOS as expected). To properly debug KOS, you have to do the following:CTRL+ALT+A to open the "Command Window"alias d Debug.MIDebugLaunch /Executable:foo /OptionsFile:MIOptions.xmld , followed by ENTERCTRL+SHIFT+B ) before running d from the "Command Window". If you fail to do so and run d immediately, you will actually launch whatever configuration you had selected previously. I personally use Visual Studio 2017 Community Edition for this, as it actually has a fairly unknown feature Open Folder which allows for a hacky way to get full support for GDB debugging without having to pay an insane sum of up to $340 for VisualGDB (I'm doing this as a hobby; I don't have that kind of money; Jeez: I could barely scrape together $10 if that was the asking price)
I mean seriously: Even when you scoure the osdev wiki you'll come across references to VisualGDB and VisualKernel, so I really don't understand who wrote that recommendation. - I don't think any of us bare-metal, kernel-development enthusiats (especially newcomers who could use a real, and simple to use integrated debugging experience the most) would be willing to pay that much...
В любом случае. - Even though practically no documentation on this feature of Visual Studio (of which you can get the Community Edition for free by the way) exists, I managed to get it working through trial and error.
And if you don't like Visual Studio (or aren't using Windows) I do know for a fact that Visual Studio Code also includes functionality for connecting to a GDB server/stub when you start diving into extensions
So here are your options:
tcp:localhost:1234 , and have qemu wait until something connects to it):deemon magic.dee --run-only --gdb=server --target=i386 --config=OD This one uses my own personal gdb server that gets loaded into the kernel as a driver. It offers out-of-the-box support for enumerating libraries, drivers, and running threads/processes (offering both multiprocess+ and QNonStop:1 functionality)deemon magic.dee --run-only --gdb=emulator --target=i386 --config=OD This one uses qemu's built-in gdb stub, which offers less functionality since it won't know how to enumerate threads created by the KOS scheduler, or list all of the libraries/drivers loaded into the kernel, meaning that tracebacks will only include source locations from the kernel core. This option is mainly meant for debugging things that happen before the GDB driver is loaded, or things that break the GDB stub driver itself (It's home-made and hacked together based on knowledge leared from observation, qemu's implementation, gdbserver, and bits and pieces of documentation from across the internet)$PROJPATH/kos folder and have all of this happen in 1 step when you press the debug buttongdb built for a generic i386 target and type target remote localhost:1234Примечания:
$PROJPATH , but open $PROJPATH/kos instead. - Opening the former will not work properly and Visual Studio may even crash after a while since (at least for me) it seems unable to coax with the thousands of source files apart of binutils and gcc. And despite all of the methods that (supposedly) exist to have Visual Studio ignore certain paths within your source tree, all of them only function to hide folders from the Solution Explorer (despite their documentation claiming to also hide them from the source code scanners). So my solution was to move everything that's actually interesting to me into the $PROJPATH/kos sub-folder and always open that one when programming.make_toolchain.sh at least once to ensure that it was able to generate the file $PROJPATH/kos/.vs/launch.vs.json (this has to be done dynamically since it must contain some absolute paths depending on where your $PROJPATH is located at) (for this purpose, it's likely to work even if make_toolchain.sh fails, since the creation of this file is one of the first things it does) The KOS build system is quite complex, as KOS system headers depend on CRT feature definition files which it will automatically generate/update as features are added to, or removed from the kernel or libc.
Some parts of the system headers and libraries are automatically generated. This normally happens as part of invoking deemon magic.dee , which will check if changes happened to the sources of such files. (You can easily tell that a file is auto-generated by checking if it starts with /* HASH CRC-32:... */ )
Note however that you should not attempt to manually modify automatically generated pieces of code. - Doing so will cause the build system to refuse to overwrite your changes so-as to never accidentally delete them without you realizing what happened.
The most notable feature of the KOS build system is the way that it generates libc headers, as well as sources, inline-substitutions, and a few other files.
For this, the KOS system header folder contains crt feature files. These files are literally huge headers with thousands of #define s for every publicly exported symbol (they can be found in /kos/include/i386-kos/crt-features/crt-kos[-kernel].h ).
Using this system, KOS system headers will automatically determine the features provided by the linked libc, and fill in the gaps, thus offering a much more complete API experience, regardless of what the underlying libraries actually offer.
Now assuming that some functionality is missing from linked libraries, this manifests itself by the automatic function substitution system kicking in and providing local definitions (aka. static/inline functions) for pretty much everything found in system headers (eg memcpy is immediately implemented as an inline/static function in /kos/include/libc/local/string/memcpy.h ).
With these substitutions in place, libraries and the kernel can still be built, however will result in below-optimal code being generated, simple due to the rediculous amount of redundancies.
For more information about the header substitution system, and how it makes it possible to use KOS's headers for toolchains other than KOS itself (requiring only minor, to no modifications at all), take a look at the section on Automatic System Headers.
KOS supports emulated execution via one of the following emulators:
deemon magic.deedeemon magic.dee --emulator=qemuenumerateQEmuInstallationLocations() in $PROJPATH/kos/misc/magicemulator/qemu.dee (by default this list contains $PATH )deemon magic.dee --emulator=bochsenumerateBochsInstallationLocations() in $PROJPATH/kos/misc/magicemulator/bochs.dee (by default this list contains $PATH )deemon magic.dee --emulator=vboxenumerateVirtualBoxInstallLocations() in $PROJPATH/kos/misc/magicemulator/vbox.dee (by default this list contains $PATH ) KOS uses various interpreter/intermediate compilers for centralizing the definition, substitution, aliasing, binding, and documentation of most system headers containing definitions of functions exported from libc. (A similar system also exists for defining and updating system calls)
This system is tightly interwoven with the CRT feature files described in the section Notes on building KOS, and will automatically provide and substitute definitions for not only C-standard headers, but also a variety of others.
This is done via a custom function definition protocol implemented by a deemon program found in $PROJPATH/kos/misc/magicgenerator/generate_headers.dee , which when run, will parse and link the definition files from $PROJPATH/kos/src/libc/magic/*.c to gain knowledge of what goes where, how everything looks like, what annotations may be applied to functions, how functions are implemented, and so on...
As the end result, KOS is able to provide definitions for many header functions while simultaniously exporting them from both libc (and sometimes the kernel) in such a way that the possibility of mistakes happening due to redundancy falls away (eg all function prototypes of memcpy() are annotated with ATTR_NONNULL((1, 2)) , and despite this specific annotation existing in possibly more than 20 places, any changes to it would only require a single modification of the tags in /kos/src/libc/magic/string.c ).
Additionally, when using KOS headers with a CRT other than KOS, this makes it possible to substitute KOS-specific extensions such as strend() by automatically providing a local implementation of the function though /kos/include/local/string/strend.h , where this variant of the function is implemented identically to the variant exported by KOS's libc, meaning that in the event of changes having to be made to its implementation, all that's required is another single alteration in /kos/src/libc/magic/string.c .
In the end, thanks to the feature definition files (which basically just needs to contain a list of all the symbols exported from the CRT against which the hosted binary is to-be linked), 90% of the usual work of having KOS headers be hosted by some new libc will only require the addition of a new crt-features file, as well as making use of it in /kos/include/__crt.h , making the KOS toolchain extremely configurable, as well as versatile and portable. (That is: once you understand how everything fits together)
Another useful feature of this lies in the fact that it allows any source file to force the use of local definitions of certain functions, preventing that source file from becoming dependent on being linked against libc (being able to do this is required to build a dynamic linker, which couldn't very well do its job of linking if it had to link itself first...).
For example, an application could force the headers to provide a local implementation of sprintf() :
/* Load CRT features so we can modify them to our liking */
#include <__crt.h>
/* Delete sprintf() support from libc (`sprintf()' will now be
* defined with a local implementation that invokes `vsprintf()') */
#undef __CRT_HAVE_sprintf
/* Delete vsprintf() support from libc (`vsprintf()' will now be
* defined with a local implementation that invokes `format_vprintf()') */
#undef __CRT_HAVE_vsprintf
/* Delete format_vprintf() support from libc (`format_vprintf()' will
* now be implemented entirely within this compilation unit, and no
* longer be loaded from libc) */
#undef __CRT_HAVE_format_vprintf
/* The same procedure could now be repeated for all of the functions
* which may be called by `format_vprintf()', until eventually there
* won't be any trace left of the dependencies normally related to
* `sprintf()' */
#include <stdio.h>
/* This application does not have a dependency on libc:`sprintf' */
int main () {
char buf [ 64 ];
sprintf ( buf , "foo = %d" , 42 );
printf ( "%sn" , buf );
return 0 ;
} Note however, that some functions can't easily be substituted (eg open(2) ). As such, if a function appears in a header, but isn't provided by libc, nor has a local implementation, the function will simply not be defined (giving you a compile-time error, rather than having to wait for link-time).
Lastly, if there ever ends up being some gaping flaw in how KOS defines functions in headers, the fix will always be as simple as making a limited number of changes to the code generator scripts, instead of requiring millions of code locations to be updated, only to forget a hand full of them and have them lingering as dormant bugs to re-surface years in the future.
WARNING: NOTHING IN THE FOLLOWING SECTION IS LEGAL ADVICE, OR MAY BE CONSIDERED AS LEGALLY BINDING IN ANY SORT OF COURT! IT'S ONLY PURPOSE IS TO HELP CLARIFY HOW TO DEAL WITH CODE THAT IS LICENSED DIFFERENTLY!
Certain components of KOS, its (system-)headers, libraries, or some other component found as part of its source tree, as one is presented with in whatever form of distribution you may encouter it (KOS's source tree) in, may contain few parts that are not necessarily licensed under the ZLib license (the ZLib license being the primary license under which all of the new (as in: specifically written for the purpose of use with KOS) code falls)
One example for this would be the implementation of the libc function qsort() , as exported from the header <stdlib.h> , who's implementation has been lifted from Glibc (which is not licensed under ZLib, and as such requires derived code's direct (as in: static inclusion during linking, or automatic inline substitution during compilation, as opposed to dynamic linking at runtime) use in any derived software to also comply with its (Glibc's) license agreement)
For this purpose, note that the ZLib license is compatible with GPL (which is the license that applies to the aformentioned , meaning that use of KOS in its entirety in any product requires that product to comply with the requirements of both GPL, as well as ZLib.qsort() function)
For the purpose of using only parts of KOS (such as copy-pasting a piece of KOS-specific ( new ) code), it is usually sufficient to include a copy of the copyright notice that should be located at the top of the original source file, or can also be found in $PROJPATH/LICENSE , as well as include a reference (eg a link) to the original source (and git revision/commit id), and document the fact if changes have been made. However, once any code is included that is not part of the aformentioned KOS-specific ( new ) code (such code is plainly marked as such), you once again will have to comply to its specific copyright requirements as well.
Note that for this purpose, GPL was only mentioned as an example, but not as the rule, as other pieces of code may exist that use different licenses yet.
In practice this means that the KOS source tree, and its repository are required to remain open-source forever, thus complying with GPL, however other projects are allowed to lift KOS-specific code (and KOS-specific code only), and only have to comply with requirements stated by the ZLib license. (eg You could steal my pageframe allocator system and use it in a commercial kernel, so-long as you neither claim to have written it yourself, and as an extension: don't claim to have written everything in your project yourself, as well as take the blame when it does end up breaking for some reason at some point)
Another important distinction applies to GPL code that has been modified for the purpose of being made functional with KOS. Such code will always be marked as such and must be handled as falling under both the GPL, and the ZLib license (the original base code being GPL, and the changed made (ie an imaginary *.patch file) being ZLib), meaning that it (the end-product of the imaginary *.patch file), too, has to remain open-source, may not end up being used in commercial products, and any further changes made to it in the context of other projects will also have to be marked as such (in this case it sufficies to include all pre-exting copyright notices, before adding your own (GPL- and ZLib-compatible) license alongside a comment stating something something along the lines of Originally lifted from https://github.com/GrieferAtWork/KOSmk4/..., before changes were made to the original source material ) The exact changes are not required to be marked on a per-line basis, since the inclusion of a reference to the original source (alongside a git revision/commit id) would allow one to perform a diff between the two versions to determine changes made.


