AdaptSegNet
1.0.0
การใช้ Pytorch ของวิธีการของเราในการปรับการแบ่งส่วนความหมายจากชุดข้อมูลสังเคราะห์ (โดเมนต้นทาง) เป็นชุดข้อมูลจริง (โดเมนเป้าหมาย) จากการดำเนินการนี้ผลลัพธ์ของเราอยู่ในอันดับที่ 3 ใน Visda Challenge
ติดต่อ: Yi-Hsuan Tsai (Wasidennis ที่ Gmail dot com) และ wei-chih Hung (whung8 ที่ ucmerced dot edu)
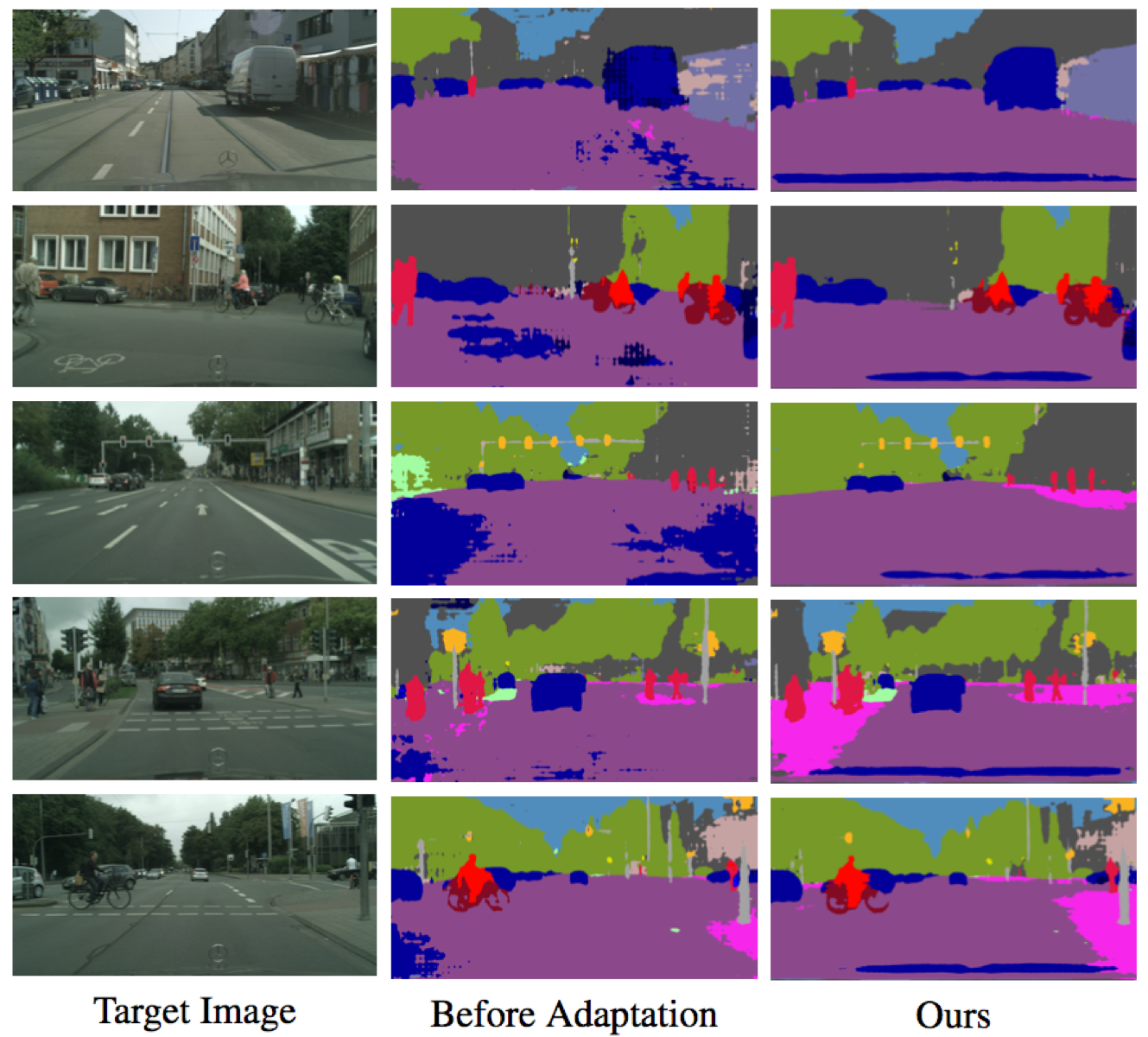
เรียนรู้ที่จะปรับพื้นที่เอาต์พุตที่มีโครงสร้างสำหรับการแบ่งส่วนความหมาย
Yi-Hsuan Tsai*, Wei-Chih Hung*, Samuel Schulter, Kihyuk Sohn, Ming-Hsuan Yang และ Manmohan Chandraker
การประชุม IEEE เกี่ยวกับการมองเห็นและการจดจำรูปแบบคอมพิวเตอร์ (CVPR), 2018 ( สปอตไลท์ ) (* หมายถึงการมีส่วนร่วมที่เท่าเทียมกัน)
โปรดอ้างอิงบทความของเราหากคุณพบว่ามีประโยชน์สำหรับการวิจัยของคุณ
@inproceedings{Tsai_adaptseg_2018,
author = {Y.-H. Tsai and W.-C. Hung and S. Schulter and K. Sohn and M.-H. Yang and M. Chandraker},
booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
title = {Learning to Adapt Structured Output Space for Semantic Segmentation},
year = {2018}
}
ติดตั้ง pytorch จาก http://pytorch.org ด้วย Python 2 และ Cuda 8.0
ใหม่ เพิ่มวัตถุประสงค์ LS-GAN เพื่อปรับปรุงประสิทธิภาพ
--gan LS ระหว่างการฝึกอบรม (ดูรายละเอียดเพิ่มเติมด้านล่าง)Pytorch 0.4 กับ Python 3 และ Cuda 8.0
pytorch_0.4--tensorboard ในคำสั่ง--lambda-adv-target1 0.00005 --lambda-adv-target2 0.0005 เราจะตรวจสอบปัญหานี้ในไม่ช้าโคลน repo นี้
git clone https://github.com/wasidennis/AdaptSegNet
cd AdaptSegNet
ดาวน์โหลดชุดข้อมูล GTA5 เป็นโดเมนต้นทางและใส่ไว้ในโฟลเดอร์ data/GTA5
ดาวน์โหลดชุดข้อมูล CityScapes เป็นโดเมนเป้าหมายและวางไว้ในโฟลเดอร์ data/Cityscapes
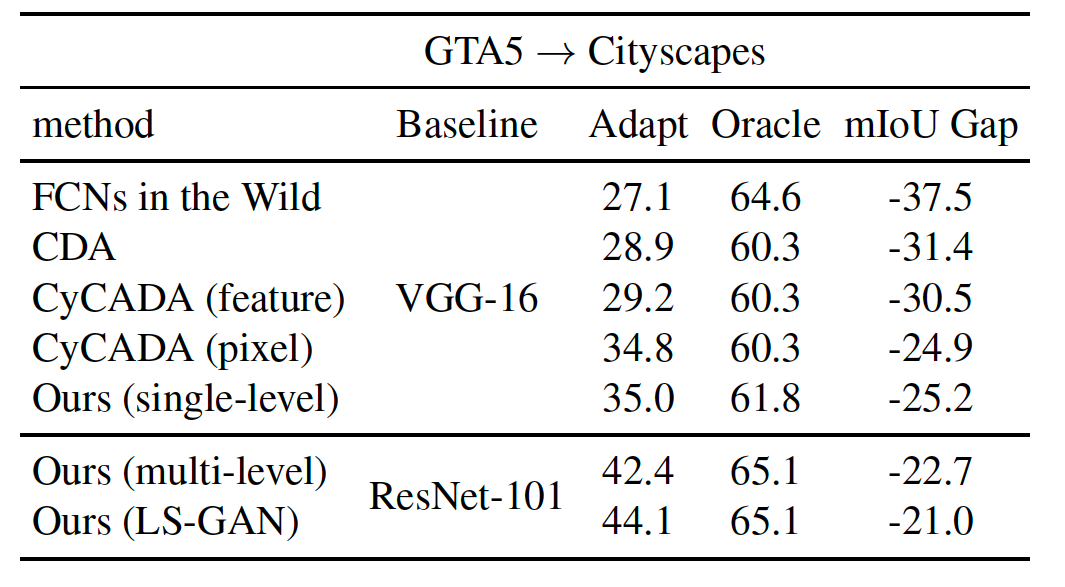
โปรดค้นหาโมเดลที่ผ่านการตรวจสอบของเราโดยใช้ RESNET-101 ในการตั้งค่ามาตรฐานสามครั้งที่นี่
พวกเขารวมถึง baselines (โดยไม่ต้องปรับตัวและมีการปรับตัวให้เข้ากับคุณลักษณะ) และโมเดลของเรา (ระดับเดียวและหลายระดับ)
ผลลัพธ์การอัปเดต ใหม่ โดยใช้ LS-GAN และการใช้ซินซิปเป็นโดเมนต้นทาง
ดาวน์โหลดโมเดล GTA5-to-Cityscapes ที่ผ่านการฝึกอบรมมาหลายระดับและวางไว้ในโฟลเดอร์ model
ทดสอบโมเดลและผลลัพธ์จะถูกบันทึกไว้ในโฟลเดอร์ result
python evaluate_cityscapes.py --restore-from ./model/GTA2Cityscapes_multi-ed35151c.pth
python evaluate_cityscapes.py --model DeeplabVGG --restore-from ./model/GTA2Cityscapes_vgg-ac4ac9f6.pth
python compute_iou.py ./data/Cityscapes/data/gtFine/val result/cityscapes
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_single_lsgan
--lambda-seg 0.0
--lambda-adv-target1 0.0 --lambda-adv-target2 0.01
--gan LS
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_multi
--lambda-seg 0.1
--lambda-adv-target1 0.0002 --lambda-adv-target2 0.001
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_single
--lambda-seg 0.0
--lambda-adv-target1 0.0 --lambda-adv-target2 0.001
รหัสนี้ยืมมาอย่างหนักจาก Pytorch-deeplab
รูปแบบและรหัสมีให้สำหรับวัตถุประสงค์ในการวิจัยที่ไม่ใช่เชิงพาณิชย์เท่านั้น


