AdaptSegNet
1.0.0
Implementasi PyTorch dari metode kami untuk mengadaptasi segmentasi semantik dari dataset sintetis (domain sumber) ke dataset nyata (domain target). Berdasarkan implementasi ini, hasil kami berada di peringkat ke -3 dalam tantangan VISDA.
Hubungi: Yi-Hsuan Tsai (Wasidennis di Gmail Dot Com) dan Wei-Chih Hung (whung8 di ucmerced dot edu)
Belajar mengadaptasi ruang output terstruktur untuk segmentasi semantik
Yi-Hsuan Tsai*, Wei-Chih Hung*, Samuel Schulter, Kihyuk Sohn, Ming-Hsuan Yang dan Manmohan Chandraker
Konferensi IEEE tentang Visi Komputer dan Pengenalan Pola (CVPR), 2018 ( Spotlight ) (* menunjukkan kontribusi yang sama).
Harap kutip makalah kami jika Anda merasa berguna untuk penelitian Anda.
@inproceedings{Tsai_adaptseg_2018,
author = {Y.-H. Tsai and W.-C. Hung and S. Schulter and K. Sohn and M.-H. Yang and M. Chandraker},
booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
title = {Learning to Adapt Structured Output Space for Semantic Segmentation},
year = {2018}
}
Instal Pytorch dari http://pytorch.org dengan Python 2 dan Cuda 8.0
Baru tambahkan tujuan LS-GAN untuk meningkatkan kinerja
--gan LS selama pelatihan (lihat di bawah untuk detail lebih lanjut)Pytorch 0,4 dengan Python 3 dan Cuda 8.0
pytorch_0.4--tensorboard dalam perintah--lambda-adv-target1 0.00005 --lambda-adv-target2 0.0005 . Kami akan segera menyelidiki masalah ini.Klone repo ini
git clone https://github.com/wasidennis/AdaptSegNet
cd AdaptSegNet
Unduh dataset GTA5 sebagai domain sumber, dan masukkan ke dalam folder data/GTA5
Unduh dataset CityScapes sebagai domain target, dan masukkan ke dalam folder data/Cityscapes
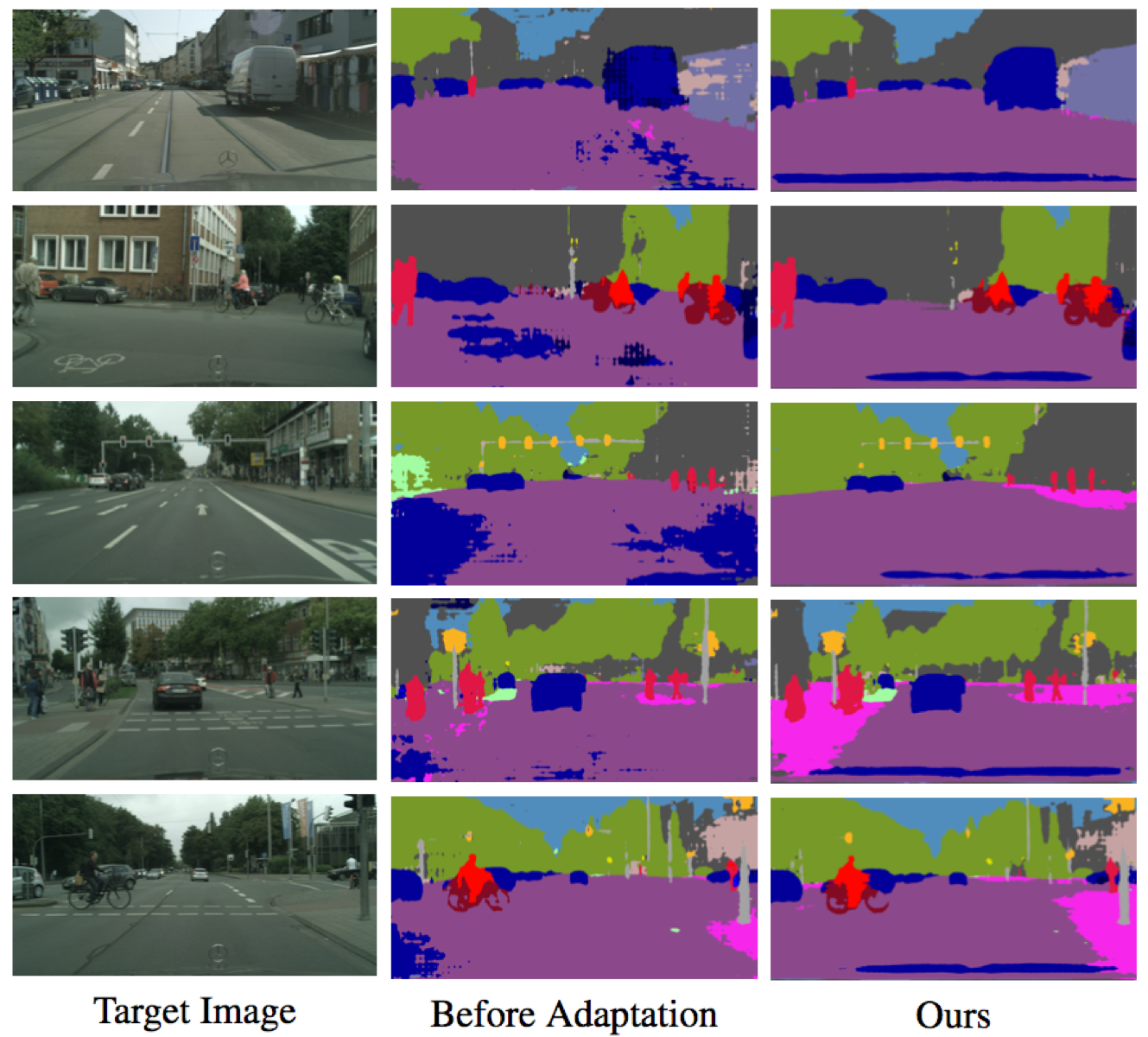
Silakan temukan model kami yang sudah diisi menggunakan ResNet-101 pada tiga pengaturan benchmark di sini
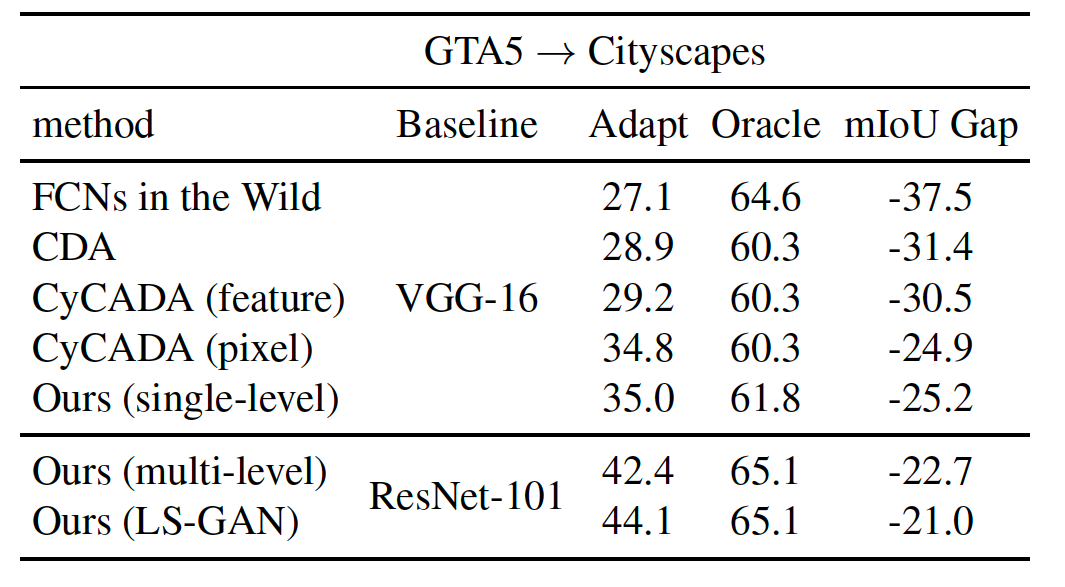
Mereka termasuk baselines (tanpa adaptasi dan dengan adaptasi fitur) dan model kami (tingkat tunggal dan multi-level)
Hasil Pembaruan Baru Menggunakan LS-Gan dan Menggunakan Sinscapes Sebagai Domain Sumber
Unduh model GTA5-ke-CityScapes multi-level pra-terlatih dan masukkan ke dalam folder model
Uji model dan hasilnya akan disimpan di folder result
python evaluate_cityscapes.py --restore-from ./model/GTA2Cityscapes_multi-ed35151c.pth
python evaluate_cityscapes.py --model DeeplabVGG --restore-from ./model/GTA2Cityscapes_vgg-ac4ac9f6.pth
python compute_iou.py ./data/Cityscapes/data/gtFine/val result/cityscapes
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_single_lsgan
--lambda-seg 0.0
--lambda-adv-target1 0.0 --lambda-adv-target2 0.01
--gan LS
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_multi
--lambda-seg 0.1
--lambda-adv-target1 0.0002 --lambda-adv-target2 0.001
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_single
--lambda-seg 0.0
--lambda-adv-target1 0.0 --lambda-adv-target2 0.001
Kode ini banyak dipinjam dari Pytorch-deeplab.
Model dan kode hanya tersedia untuk tujuan penelitian non-komersial saja.


