AdaptSegNet
1.0.0
Implémentation pytorch de notre méthode pour adapter la segmentation sémantique de l'ensemble de données synthétique (domaine source) à l'ensemble de données réel (domaine cible). Sur la base de cette implémentation, notre résultat est classé troisième au Visda Challenge.
Contact: Yi-Hsuan Tsai (Wasidennis à Gmail Dot Com) et Wei-chih Hung (Whung8 at ucmerced dot edu)
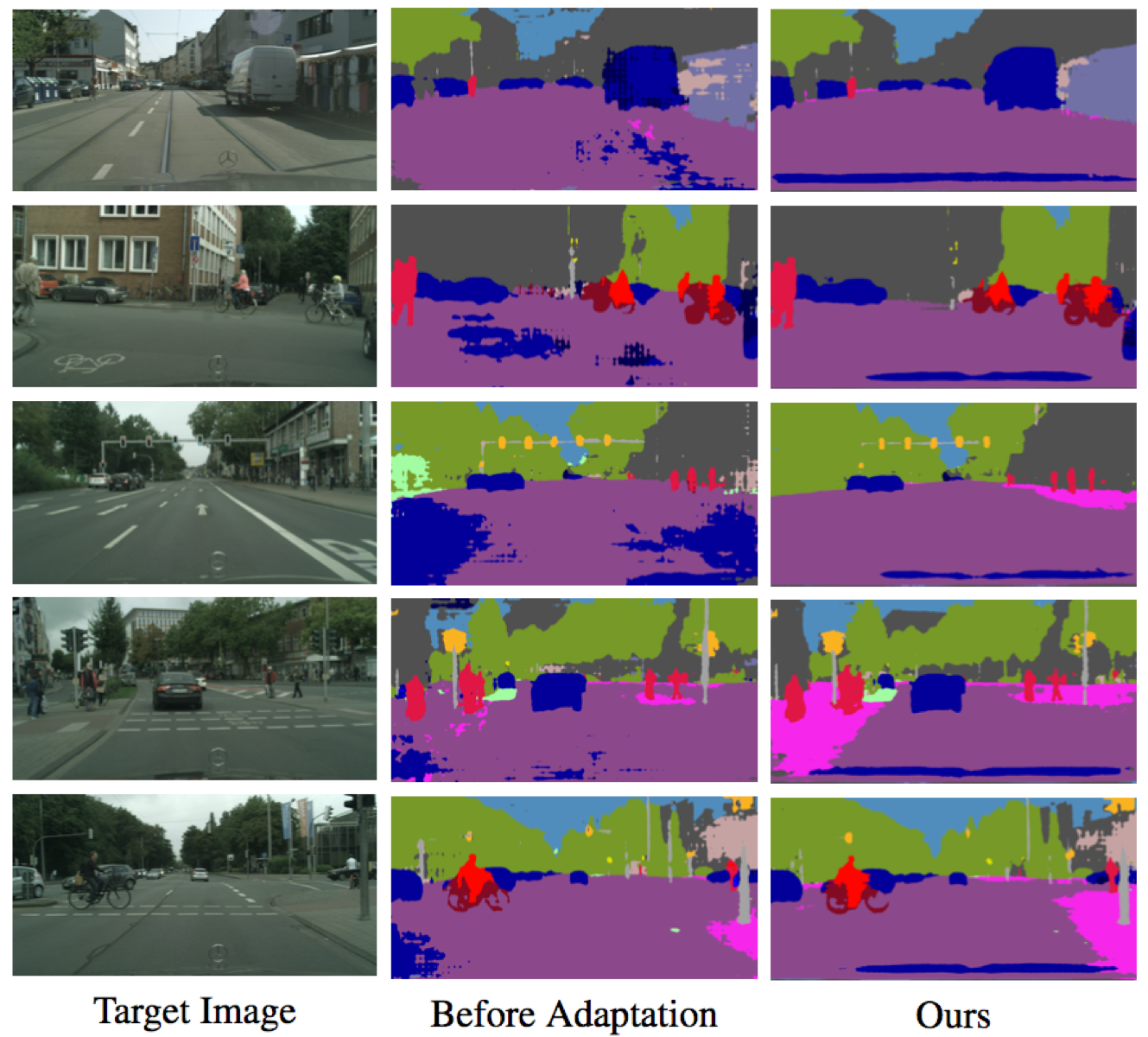
Apprendre à adapter l'espace de sortie structuré pour la segmentation sémantique
Yi-hsuan tsai *, Wei-chih Hung *, Samuel Schulter, Kihyuk Sohn, Ming-Hsuan Yang et Manmohan Chandraker
Conférence IEEE sur la vision par ordinateur et la reconnaissance des modèles (CVPR), 2018 ( Spotlight ) (* indique une contribution égale).
Veuillez citer notre article si vous le trouvez utile pour vos recherches.
@inproceedings{Tsai_adaptseg_2018,
author = {Y.-H. Tsai and W.-C. Hung and S. Schulter and K. Sohn and M.-H. Yang and M. Chandraker},
booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
title = {Learning to Adapt Structured Output Space for Semantic Segmentation},
year = {2018}
}
Installez Pytorch à partir de http://pytorch.org avec Python 2 et Cuda 8.0
Nouveau Ajouter l'objectif LS-Gan pour améliorer les performances
--gan LS pendant l'entraînement (voir ci-dessous pour plus de détails)Pytorch 0.4 avec Python 3 et Cuda 8.0
pytorch_0.4--tensorboard dans la commande--lambda-adv-target1 0.00005 --lambda-adv-target2 0.0005 . Nous enquêterons bientôt sur ce problème.Cloner ce repo
git clone https://github.com/wasidennis/AdaptSegNet
cd AdaptSegNet
Téléchargez l'ensemble de données GTA5 comme domaine source et mettez-les dans le dossier data/GTA5
Téléchargez l'ensemble de données Cityscapes comme domaine cible et mettez-les dans le dossier data/Cityscapes
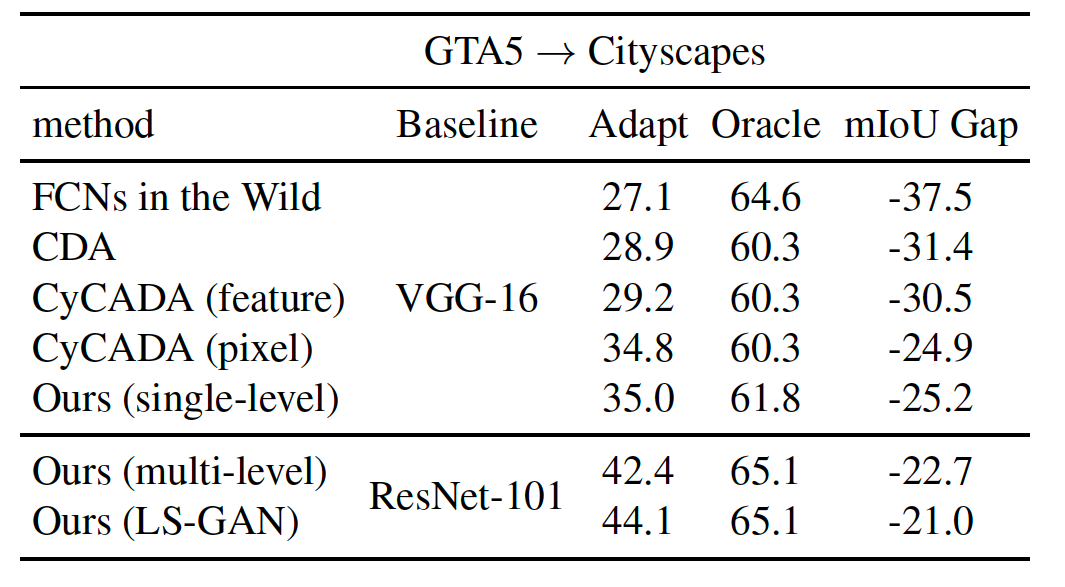
Veuillez trouver nos modèles prétraités en utilisant RESNET-101 sur trois paramètres de référence ici
Ils incluent les lignes de base (sans adaptation et avec adaptation des fonctionnalités) et nos modèles (un niveau et multi-niveaux)
Nouveaux résultats de mise à jour à l'aide de LS-Gan et à l'aide de synscapes comme domaine source
Téléchargez le modèle GTA5-to-Cityscapes pré-formé à plusieurs niveaux et mettez-le dans le dossier model
Testez le modèle et les résultats seront enregistrés dans le dossier result
python evaluate_cityscapes.py --restore-from ./model/GTA2Cityscapes_multi-ed35151c.pth
python evaluate_cityscapes.py --model DeeplabVGG --restore-from ./model/GTA2Cityscapes_vgg-ac4ac9f6.pth
python compute_iou.py ./data/Cityscapes/data/gtFine/val result/cityscapes
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_single_lsgan
--lambda-seg 0.0
--lambda-adv-target1 0.0 --lambda-adv-target2 0.01
--gan LS
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_multi
--lambda-seg 0.1
--lambda-adv-target1 0.0002 --lambda-adv-target2 0.001
python train_gta2cityscapes_multi.py --snapshot-dir ./snapshots/GTA2Cityscapes_single
--lambda-seg 0.0
--lambda-adv-target1 0.0 --lambda-adv-target2 0.001
Ce code est fortement emprunté à Pytorch-DeepLab.
Le modèle et le code sont disponibles à des fins de recherche non commerciales uniquement.


